
基于模糊PID的变电站巡检机器人运动控制研究
2024-07-10 10:37:32杨惠
无线互联科技 2024年11期
杨惠

摘要:传统的变电站巡检方式主要以人工为主,存在一定的弊端。随着机器人技术的发展,使用巡检机器人代替人工完成变电站的巡检任务,能有效提高巡检效率,这将成为今后变电站巡检的发展趋势。文章就变电站巡检环境设计了一种基于模糊PID的运动控制系统。仿真和试验表明,相对于常规的PID控制,该模糊PID运动控制系统具有很好的响应速度、稳定性和精度,能够满足变电站巡检机器人运动控制的设计要求。
关键词:变电站;巡检机器人;模糊PID;运动控制
中图分类号:TP319 文献标志码:A
0 引言
随着经济的高速发展,电力系统规模逐渐扩大,保障电力系统的稳定性具有很重要的作用。变电站是电网的核心,对变电站内的设备进行巡检,对电力系统的安全运行有着很重要的作用。传统的变电站巡检主要以人工方式为主,这种方式有一定的弊端:劳动强度大,巡检效率低,容易受天气影响,而且需要工作人员凭借经验来判断设备是否有漏油、裂痕、异常声响等故障,甚至还会对工作人员的人身安全造成危险。随着机器人技术的发展,使用巡检机器人代替人工完成变电站的巡检任务,可以大大降低工作人员的劳动强度,提高工作效率,降低人工操作的安全风险,具有广阔的应用前景[1]。
本文研究的机器人为搭载红外热像仪和可见光摄像头的变电站巡检机器人,它通过2个步进电机控制机器人底盘的运动。为了使机器人实现安全可靠的巡检任务,需要在机器人作业过程中,对内部电机进行精确控制。传统的电机控制采用PID控制,由于步进电机在运行过程中容易受到负载、摩擦力等影响,会造成步数丢失、2个步进电机不能保持同步的现象。为了达到可靠的控制效果,本文采用模糊PID控制的方法。
1 硬件总体设计
运动控制器位于变电站巡检机器人系统的中间层,运动控制系统硬件共由5个模块组成,分别是中央计算器模块、电磁传感器模块、速度检测模块、电机驱动模块、电源模块。其中,中央计算器模块负责处理和决策所有数据;电磁传感器模块负责感知;速度检测模块负责检测速度信息;电机驱动模块负责机器人动力;电源模块负责整个系统的供电。
本课题设计的变电站巡检机器人运动控制系统主要适用于环境不是十分恶劣及路面状况比较简单的一般中小型变电站,以三门峡某110 kV变电站为例,联合使用传统PID控制算法和模糊控制,形成了具有自适应调节功能的智能控制器,以实现机器人运动控制系统精确控制,保障巡检机器人运动时的平衡性,提升巡检效率。
2 机器人运动模型
机器人的机械结构由2个驱动轮和2个万向轮组成。由于机器人运动方式为前轮转向、后轮驱动,为了便于分析,把机器人运动方式简化为两轮驱动的形式[2]。机器人按照设定好的路线进行巡检,到达变电站内检测点停下来对设备进行巡检,检查结束继续按照设定好的路线运行。因为巡检机器人在变电站内的运动路线是固定的,所以本文主要研究对机器人转向和速度的控制。
为了更精准地描述车辆运动状态,本设计首先构建一个多个自由度下的车辆模型,主要包含发动机、轮胎、底盘、传动系统等部件。机器人系统是非线性系统,随着车轮速度的改变,各项参数也会有很大的变化,在低速时,车辆表现为动力学特性。因此,本文在对巡检机器人运动控制系统进行分析时,把车辆当做在地平面内运动,不考虑车辆的侧滑效应,主要分析车辆的动力学模型[3]。
3 模糊PID控制
传统PID控制器结构简单、稳定,是自动控制领域的主要技术之一。在建立系统模型时,对结构和参数不确定的系统,采用PID控制,但是PID控制器具有一定局限性。首先,需要操作者具有丰富的经验;其次,需要建立系统精确的数学模型,对于复杂的非线性系统,由于操作者无法精确描述控制过程中各种信号量,PID控制难以实现精确的控制;最后,对于参数实时调整的系统,PID控制器不能实现在线调整。
近20年,模糊控制在理论和技术方面发展迅速,在生活和工业中应用广泛,已经成为智能控制系统中应用很广的一个分支。将PID和模糊控制相结合,使用模糊PID控制,达到在线调整控制过程中的各种参数、优化系统参数、提高控制效果的目的。模糊PID在工业、交通、航空、生活中应用广泛,如温度控制、汽车驾驶、发酵等。
3.1 模糊PID控制器结构
在本系统中,将误差e和误差变化率ec作为输入,即将机器人转向时转速的输入信号与反馈信号作为输入,建立一个模糊PID控制器,实现对机器人的左右轮速度控制;系统利用两轮速度反馈的速度信号之差来调节巡检机器人的运行方向,实现巡检任务;对不同时刻转速的误差e和误差变化率ec,系统通过不断修正的方法,在线调节PID的参数,克服机器人转向时候参数的改变以及障碍物等因素,提高巡检机器人运动控制系统的自整定能力和稳定性。
3.2 模糊控制器的设计
3.2.1 模糊子集及其隶属函数的确定
该模糊PID控制器的输入变量为速度误差偏差e和误差随时间的导数ec,即ec= de/dt。设计控制器时,将输入变量和输出变量进行模糊化,用大中小模糊矢量分别来表示输入和输出变量信息,模拟成人能感知到的信息。将输入和输出变量分为7个模糊量,分别为:{NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)}。将输入变量偏差e和偏差变化量ec的论域设定为[-3,3],将输出变量KP、KI、KD的论域设定为[-1.5 1.5]、[-0.1 0.5]、[-0.1 0.1]。
本系统隶属函数采用三角形隶属函数。对于三角形隶属函数,形状尖对应系统的分辨率和灵敏度就高;形状缓对应系统的稳定性就越好[4]。为了提高在零点附近的控制精确度,将系统中零点附近的模糊子集划分较细且占用的论域区段较小。
3.2.2 模糊控制规则
模糊控制规则的设计应满足以下条件。
当机器人转速偏差较大时,应使被控量误差迅速减小;当机器人转速偏差较小时,应维持系统的稳定性,避免出现超调的现象。
本控制器输入变量为转速偏差e及偏差的变化率ec,输出变量为KP、KI、KD。根据多次试凑以及人工经验总结,结合PID控制的特点,得出机器人转向时的输入变量和输出变量的整定原则。
(1)当系统偏差|e|较大时,适度增大比例系数KP和减小微分系数KD,可以有效提高系统响应速度;同时为了避免系统出现超调量过大的现象,还需要减小积分系数KI或令KI为零。
(2)当系统偏差|e|处于中等大小时,为了保证系统的响应速度,应减小比例系数KP,且保持较为适中的微分系数KD,同时为了消除误差,抑制超调,可以适当增加积分系数KI。
(3)当系统偏差|e|较小时,为保证系统良好的稳态性能,应增大比例系数KP和积分系数KI,同时为避免平衡点附近出现振荡现象,要根据偏差变化率ec值适当选取微分系数KD的值。
根据输出变量参数整定的原则以及模糊规则的设计要求,分别确定输出变量KP、KI、KD的控制规则表。
3.2.3 输出量的清晰化
输出量清晰化需要设置量化因子和比例因子。量化因子是为了进行模糊化处理,将输入变量从基本论域转换到相应的模糊集论域。本系统中,对于偏差e,其论域范围为[-xe,xe];对于偏差变化率ec,其论域范围为[-xec,xec]。把论域转化为整数N=[-n,-n+1,-L,0,L,n-1,n],则量化因子分别为ke=nXe,kec=nXec。
模糊控制器得到模糊控制输出值,需要将其转换为控制对象能接受的基本论域中。模糊控制比例因子指在模糊控制系统设计中,用来确定模糊控制器输出的系数。本系统输出量的模糊论域范围为[-u,u],把论域转化为整数N=[-y,-y+1,-L,0,L,y-1,y],则比例因子为ku=yu。
根据得到的量化因子和比例因子,查询巡检机器人运动控制模糊控制规则表,得出机器人的左轮和右轮的速度,再把得到的输出量去模糊化,变成实际需要的速度值。
4 模糊PID控制系统仿真
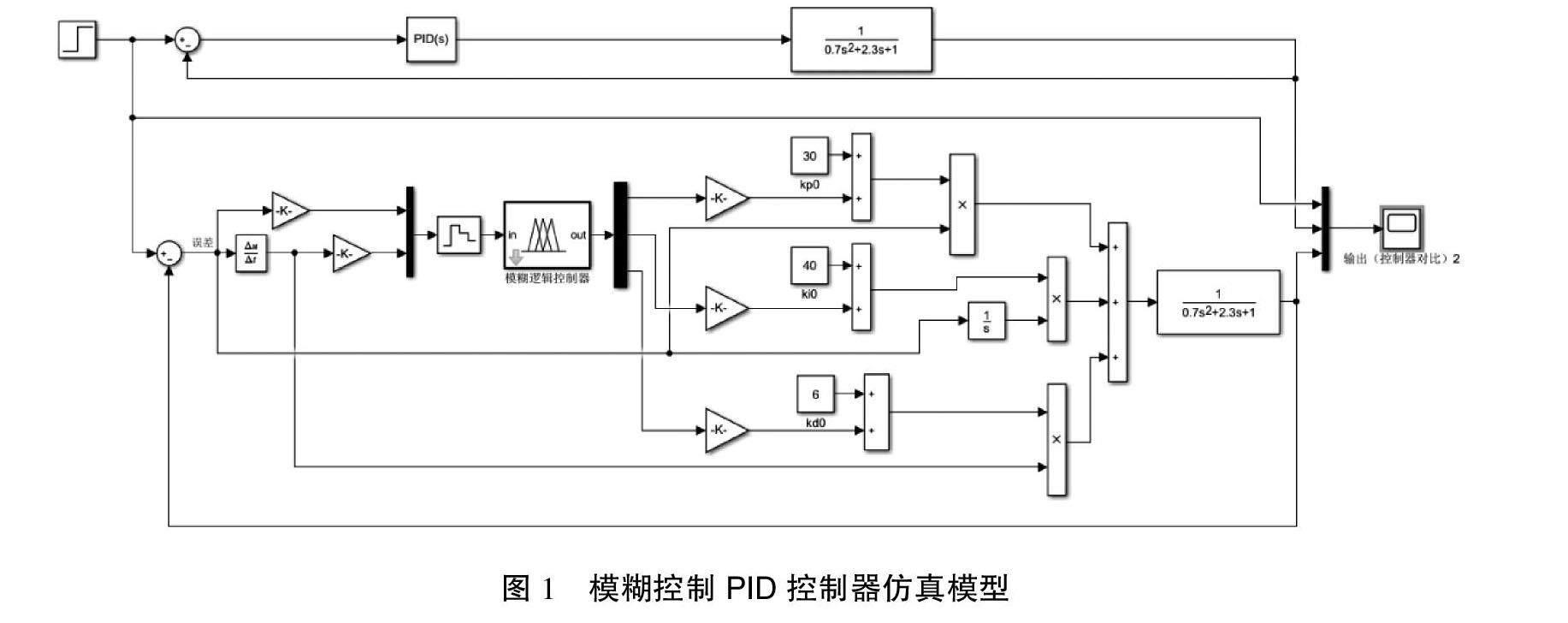
在 MATLAB的Simulink中对变电站巡检机器人模糊PID控制器建立仿真模型并进行仿真,仿真模型如图1所示。
本文分别对系统PID控制和模糊PID控制进行仿真。仿真结果表明,与传统PID控制器仿真结果对比,模糊PID控制器的稳定性较强。模糊PID控制响应时间几乎没有增加,具有稳定性好、自适应能力强、控制精度高等优点,且模糊PID控制几乎没有超调,可以很好地满足变电站巡检机器人运动控制系统的设计要求。
在实际应用中,当机器人速度偏差较大时,模糊PID控制器可以快速响应缩小系统偏差,提高机器人巡检工作的灵敏性;当机器人速度接近设定值时,模糊PID控制器可以避免超调,提高巡检机器人的控制精度。
5 结语
本文对变电站巡检机器人的运动控制系统进行研究,设计模糊PID控制器,在MATLAB/Simulink中建立机器人模糊控制PID控制器仿真模型,仿真结果表明,基于模糊PID的变电站巡检机器人运动控制系统,具有稳定性好、响应速度快、自适应能力强、控制精度高等优点,综合性能优于传统的PID控制算法。后续对巡检机器人进行测试,测试结果表明,本文设计的变电站巡检机器人运动控制策略可以很好地满足巡检机器人运动控制方面的设计要求。
参考文献
[1]张营,鲁守银.基于模糊控制算法的变电站巡检机器人路径规划[J].制造业自动化,2015(11):53-55.
[2]段晓东.变电站巡检机器人运动控制系统设计与实现[D].廊坊:北华航天工业学院,2019.
[3]杨睿琬.变电站巡检机器人运动控制器研究[D].贵阳:贵州大学,2018.
[4]李金鑫,张年松,何勇.基于模糊PID的武装机器人运动控制研究[J].控制工程,2014(增刊1):41-44.
(编辑 沈 强)
Research on motion control of substation inspection robot based on fuzzy PID
YANG Hui
(Sanmenxia Polytechnic, Sanmenxia 472000, China)
Abstract: The traditional substation inspection method mainly relies on manual labor, which has certain drawbacks. With the development of robotics technology, using inspection robots instead of manual labor to complete the inspection tasks of substations can effectively improve inspection efficiency and become the future trend of substation inspection. This article designs a motion control system based on fuzzy PID for substation inspection environment. Simulation and experiments show that compared to conventional PID control, the fuzzy PID motion control system has good response speed, stability, and accuracy, and can meet the design requirements of substation inspection robot operation control.
Key words: substation; inspection robot; fuzzy PID; motion control
猜你喜欢
电子制作(2018年8期)2018-06-26 06:43:34
电子制作(2017年8期)2017-06-05 09:36:15
电脑知识与技术(2016年27期)2016-12-15 19:35:12
中国科技博览(2016年21期)2016-11-14 22:07:20
科技视界(2016年23期)2016-11-04 11:07:53
现代工业经济和信息化(2016年5期)2016-05-17 05:35:57
科技视界(2016年5期)2016-02-22 20:10:30
企业导报(2015年15期)2016-01-18 08:49:07
现代电子技术(2015年11期)2015-07-28 12:55:19
现代电子技术(2015年8期)2015-07-09 20:33:14
