
考虑滚动半径差异的适时四驱汽车限滑控制策略
2024-07-02 10:09赵洋刘元治崔金龙周泽慧吴爱彬
汽车技术 2024年6期
赵洋 刘元治 崔金龙 周泽慧 吴爱彬


【摘要】结合小备胎识别和轮速补偿技术,设计了基于前、后轴附着率相等的限滑前馈控制和基于轴速差的限滑反馈控制,搭建了适时四驱汽车动力学仿真平台,对小备胎识别、轮速补偿、限滑控制的有效性进行了验证。实现了适时四驱汽车中央差速及差速限滑功能,提高了车辆的动力性和行驶稳定性,避免了因滚动半径差异导致的限滑控制功能误触发,解决了因备胎滚动半径小而导致的电控多片离合器异常磨损、烧蚀等问题。
主题词:适时四驱 限滑控制 扭矩分配 滚动半径差异 备胎识别 轮速补偿
中图分类号:U461.1 文献标志码:A DOI: 10.19620/j.cnki.1000-3703.20230275
Limited Slip Control Strategy for On-Demand 4WD Vehicle Considering Rolling Radius Difference
【Abstract】Combining spare wheel identification and wheel speed compensation, limited slip feedforward control based on equal utilizable friction coefficient on the front and the rear axle and limited slip feedback control based on axle speed difference were designed. And an on-demand 4WD vehicle dynamics simulation platform was built to verify the effectiveness of small spare tire identification, wheel speed compensation, and limited slip control. The strategy can achieve the central differential and differential slip limiting functions of on-demand 4WD vehicle, improve vehicles power performance and driving stability, avoid the error trigger of limited slip control caused by the difference in rolling radius, and solve the abnormal wear and ablation of the multiple-plate clutch caused by the small rolling radius of the spare tire.
Key words: On-demand 4WD, Limited slip control, Torque distribution, Rolling radius difference, Spare wheel identification, Wheel speed compensation
1 前言
电控多片离合器式适时四驱汽车可监控车辆行驶状态,实时控制离合器的目标传递扭矩,调节前、后轴的扭矩分配,提高车辆的动力性和稳定性[1-5]。然而,在车辆转向行驶时,如果离合器目标传递扭矩控制不合理,将导致转向制动干涉,严重影响整车性能和驾驶感受。并且在车辆更换小备胎后,轮胎滚动半径变小,轮速变大,前、后轴会产生附加轴速差,该附加轴速差无法通过接合离合器进行消除[6],此时若控制离合器长时间接合,摩擦片将一直处于滑摩状态,严重影响离合器的使用寿命。因此,根据车辆行驶状态和轮胎滚动半径差异进行四驱扭矩分配控制具有重要意义。
国内外学者对于适时四驱扭矩分配控制与轮胎滚动半径差异识别进行了诸多有益的研究,文献[7]利用车辆动力学模型研究了四轮驱动汽车的轴间扭矩分配机理。文献[8]研究了不同路面、不同车速和转向工况下四驱扭矩分配控制策略对整车性能的影响。文献[9]提出基于轮胎最小滑移率和横摆角速度跟随的适时四驱扭矩分配策略,迅速抑制车轮滑转的同时能有效提升车辆在低附着系数路面的操纵稳定性。文献[10]设计了基于驾驶员意图、前后车轮滑移率差和横摆角速度偏差的适时四驱扭矩分配策略,以提高车辆纵向动力性和侧向稳定性。文献[11]将实际轮速与备胎轮速阈值对比判断识别小备胎,并结合驾驶模式改善车辆驱动跑偏问题。文献[12]根据4个轮速的差异以及轮速与参考车速的关系来实时修正轮胎滚动半径。然而,上述研究均未考虑轮胎滚动半径差异对四驱控制策略的影响。
本文考虑轮胎滚动半径差异,设计一种适时四驱汽车限滑控制策略,防止转向制动干涉,避免因滚动半径差异导致的限滑控制功能误触发,以解决因更换备胎导致的离合器异常磨损和烧蚀问题。
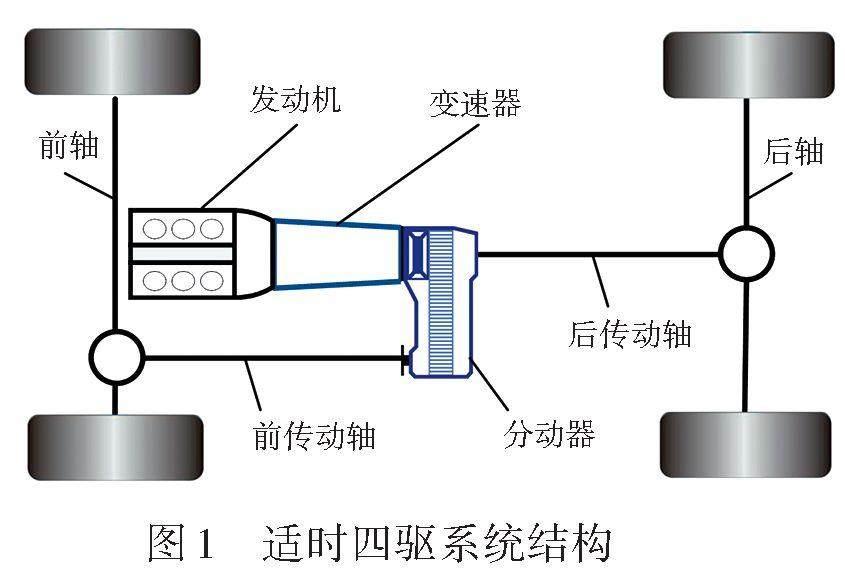
2 适时四驱系统
本文适时四驱系统基于前纵置发动机后轮驱动车型,由带有电控多片离合器的分动器、后传动轴、前传动轴组成,如图1所示。
电控多片离合器分离时,变速器输出扭矩全部传递至后轴,车辆采用后轮驱动行驶;电控多片离合器以目标传递扭矩接合时,变速器输出扭矩经分动器传递至前轴和后轴,车辆采用四轮驱动行驶。车辆四轮驱动行驶时,前、后轴的实际扭矩由离合器压力、轮胎与路面之间的作用关系等因素决定,而离合器压力与离合器目标传递扭矩相关。因此,可以通过控制离合器目标传递扭矩调节前、后轴的实际扭矩分配。
3 控制策略开发
限滑控制策略主要包括滚动半径差异识别和限滑控制,其架构如图2所示。
滚动半径差异识别主要基于车轮轮速、横摆角速度、转向盘转角等传感器信号进行小备胎识别、轮胎滚动半径修正及轮速欠压补偿。
限滑控制主要基于车辆行驶状态、驾驶模式、轮胎滚动半径差异计算离合器目标传递扭矩,包括基于前、后轴附着率相等的限滑前馈控制和基于前、后轴速差的限滑反馈控制。
3.1 滚动半径差异识别
滚动半径差异识别算法流程如图3所示,当车辆稳定行驶,如车速大于20 km/h、各车轮加速度较小、转向盘转角较小、侧向加速度较小时,滚动半径差异识别功能激活。
3.1.1 轮速信号预处理
滚动半径差异识别主要依据轮速信号。由于转向工况各车轮的转弯半径不同,外侧车轮的转弯半径大于内侧车轮,外侧车轮的轮速大于内侧车轮,各车轮的轮速并不等于参考车速,因此,需要将4个车轮的轮速按照运动学关系向后轴中心点转移,消除转向影响。根据车辆运动学关系,4个车轮的轮速转移公式为:
式中:[vs,ij]为传感器轮速,[ij=fl,fr,rl,rr]表示左前、右前、左后、右后车轮;[ω]为传感器横摆角速度;[L]为轴距;[B]为轮距;[δ]为前轮转角,可由转向盘转角与转向系统的传动比确定。
3.1.2 小备胎识别及滚动半径修正
滚动半径差异识别功能激活后,首先进行小备胎识别和滚动半径修正。将4个车轮的最大轮速与其余3个车轮的平均轮速进行比较,当最大轮速与平均轮速的差值在小备胎轮速公差带内,将最大轮速的车轮识别为小备胎;当最大轮速与平均轮速的差值不在小备胎轮速公差带内,识别为车辆未装配小备胎;考虑到车辆通常只更换1个备胎,因此,当最大轮速的车轮位置不断变化时,识别为车辆未装配小备胎。
当识别为车辆未装配小备胎时,滚动半径修正系数为1;当识别出小备胎时,小备胎的滚动半径修正系数由最大轮速和平均轮速确定。识别功能激活后开始计时,第[n]个采样周期的滚动半径修正系数为:
式中:n为采样点数量;[ksp,n-1]为上一周期的滚动半径修正系数;[vspare]为最大轮速,即小备胎轮速;[vmean]为识别出最大车轮轮速后其余3个车轮的平均轮速。
小备胎修正后的轮速为:
[vcor=kspvspare] (3)
当采样时间大于时间阈值时,小备胎识别结束,滚动半径修正完成,输出小备胎识别结果和修正系数。
3.1.3 识别结果校验及轮速补偿
小备胎识别结束后激活识别结果校验和轮速欠压补偿。在轮速补偿结束前会周期性地进行小备胎识别结果校验,当校验结果与输出结果不一致时,需重新激活小备胎识别和滚动半径修正。
为消除轮胎欠压对轮速的影响,需要对4个车轮的轮速进行欠压补偿。根据最小轮速进行补偿计算,则瞬时补偿系数[fij]和参考补偿系数[mij]分别为:
令[fmax]和[fmin]分别为瞬时补偿系数[fij]的最大值和最小值,[mmax和mmin]分别为参考补偿系数[mij]的最大值和最小值,则实际补偿系数为:
补偿轮速为:
当[fmax-fmin 3.2 限滑前馈控制 限滑前馈控制主要是基于前、后轴附着率相等来计算理想的离合器目标传递扭矩。 3.2.1 理想的离合器目标传递扭矩 当车辆在坡路上行驶时,车辆前、后轴的轴荷为: 式中:[Fzf]和[Fzr]分别为前、后轴的轴荷,即前、后轴的地面法向反作用力;[m]为整车质量;[g]为重力加速度;[h]为质心高度;[a]为前轴到质心距离;[b]为后轴到质心距离;[L]为轴距;[ax]为纵向加速度;[φ]为道路坡度,可由纵向加速度和车速计算确定。 车辆前、后轴驱动力[Fxf、Fxr]为: 式中:[μf]、[μr]分别为前、后轴的附着率。 当[μf=μr]时,前、后轴的扭矩分配为理想的扭矩分配[13],此时前、后轴可以同时滑转,车辆动力性最佳。综上,理想的扭矩分配系数[iopt]为: 那么,理想的离合器目标传递扭矩[Topt]为: [Topt=Ttransiopt] (11) 式中:[Ttrans]为变速器输出扭矩。 3.2.2 离合器目标传递扭矩的修正 理想的离合器目标传递扭矩需要根据转向盘转角、油门开度、车速等车辆行驶状态进行修正。转向盘转角越大,目标传递扭矩越小,以减少转向制动干涉;油门开度越大,目标传递扭矩越大,以充分发挥四驱稳定性;车速越高,目标传递扭矩越小,以提高车辆的经济性,避免传动系异响。理想的离合器目标传递扭矩还受到驾驶模式的影响,具体情况如表1所示。 经济模式离合器目标传递扭矩为0,车辆采取后轮驱动模式行驶。舒适模式或运动模式离合器目标传递扭矩为[Topt],车辆采取弱四轮驱动模式行驶。越野模式、沙地模式、雪地模式等强四轮驱动模式在原地起步和低速行驶工况时,离合器目标传递扭矩为分动器的设计传扭能力[Tdesign],以达到最强四驱能力,增强车辆的起步和脱困能力。 当识别到车辆更换备胎时,为防止离合器长时间接合,导致离合器异常磨损、烧蚀等问题,应将限滑前馈目标传递扭矩置为0。 3.3 限滑反馈控制 限滑反馈控制是在限滑前馈控制的基础上对目标传递扭矩进行调节,提升车辆在低附着系数路面的动力性和稳定性。限滑反馈控制主要包括轴速差计算和轴速差反馈控制,另外,在限滑反馈控制策略中需要考虑滚动半径差异带来的影响。 3.3.1 轴速差计算 对于以后轴为主驱的适时四驱汽车,限滑反馈控制主要针对后轴滑转,适时增加前轴的传递扭矩来降低后轴滑转,提升车辆的行驶稳定性。 后轴实际轴速为: 后轴目标轴速为: 式中:[vmin]为后轴目标轴速的最小值,以防止车辆在起步、蠕行等低速行驶工况下轮速传感器的精度误差,本文取2 km/h。 后轴速差为: Δv = vact - vtgt (14) 3.3.2 轴速差反馈控制 当[?v>0]且保持一定时间后,限滑反馈控制功能激活。限滑反馈控制功能采用比例积分控制,限滑扭矩调节量可表示为: 式中:[kp1、kp2]为比例系数,[ki1、ki2]为积分系数。 当[?v>0],后轴处于滑转状态,[ki1]的初始值根据变速器输出扭矩确定,变速器输出扭矩越大,[ki1]越大,以保证限滑反馈控制初期快速向前轴传递扭矩;随着时间变化,[ki1]逐渐增大,以加速抑制后轴滑转。[kp1]为可标定的常值。 当[?v≤0],后轴已不滑转,为防止限滑反馈控制功能的反复介入,导致离合器接合扭矩波动,从而引起整车驾驶性变差,需要根据车辆行驶状态调节[kp2]和[ki2],其表达式为: 式中:[kp、ki]为可标定的常值;[bk]为状态系数,取值范围为[0~1],需要综合考虑油门状态、转向状态、车速等车辆行驶状态。 [bk]可表示为: [bk=max (bacc,bsw,bv)] (17) 式中:[bacc]为油门状态系数,松油门过程取值为1,踩油门过程取值为0,以防止加速工况下限滑反馈控制功能过早退出;[ bsw]为转向状态系数,随转向盘转角增大而增大,当转向盘转角大于可标定的门限值时取值为1,以保证大转角转向工况下限滑反馈控制功能快速退出,降低分动器转向制动干涉影响;[bv]为车速状态系数,随车速的升高而增大,避免高车速工况下限滑控制功能介入而导致传动系异响。 当[Tslp≤0]且持续一定时间后,限滑反馈控制功能退出。 3.3.3 滚动半径差异对限滑反馈控制的影响 车辆更换备胎后,备胎车轮滑转更加严重,需要激活限滑反馈控制功能来抑制备胎车轮滑转;考虑到小备胎的附加轴速差会导致离合器长时间处于滑摩状态,故离合器不能长时间以大的目标传递扭矩接合。因此,本文在进行轴速差计算和反馈控制时充分考虑了轮胎滚动半径差异对控制策略带来的影响。 在轴速差计算时使用修正和补偿后的轮速,有效排除小备胎的附加轴速差对限滑反馈控制功能激活判断的干扰,确保车轮真正滑转时功能才被激活。 在轴速差反馈控制时根据小备胎识别结果对限滑扭矩调节量的上限值进行限制。当识别到小备胎后,将上限值在一定的周期内按照不同的斜率减小,保证更换小备胎后,限滑控制功能仍具有一定的限滑能力,且不会因备胎产生制动干涉。 最终,离合器目标传递扭矩为: [Tclutch=Topt+Tslp] (18) 4 仿真结果 本文采用CarSim车辆动力学仿真软件建立整车模型、驾驶员模型和道路模型,借助Simulink实现控制算法,搭建适时四驱汽车联合仿真平台,验证滚动半径差异识别算法和限滑控制算法的有效性,分析滚动半径差异对限滑控制策略的影响。 4.1 适时四驱汽车整车模型搭建 适时四驱汽车整车模型基于某公司四驱车型的设计参数(如表2所示)、悬架K&C试验数据和轮胎六分力试验数据建立。其中,分动器模型选择CarSim横摆控制差速器,横摆控制差速器由离合器1和离合器2组成。设置离合器2的最大可用扭矩为较大的常值,设置离合器1的最大可用扭矩为[Tclutch]。通过控制离合器1的最大可用扭矩来调节前、后轴的扭矩分配。 4.2 滚动半径差异识别功能验证 设置车辆右后轮为小备胎,以30%油门开度在路面附着系数为0.9的路面起步行驶,进行小备胎工况的滚动半径差异识别功能验证。 如图4所示,滚动半径差异识别功能在第14.83 s激活,计算出修正系数为0.9;在第15.33 s识别出小备胎,并将备胎轮速由119 km/h修正为107 km/h;在第22.41 s轮速补偿结束,同时滚动半径差异识别功能退出。仿真结果表明:识别算法能在0.5 s内有效识别出小备胎并完成滚动半径修正,在7.1 s内完成轮速补偿并结束识别过程,补偿轮速与参考轮速重合度较高,小备胎识别算法识别速度较快、滚动半径修正算法准确度较高。 设置车辆右后轮胎欠压,滚动半径为350 mm,以30%油门开度在路面附着系数为0.9的路面起步行驶,进行轮胎欠压工况的滚动半径差异识别功能验证。 如图5所示,滚动半径差异识别功能在第15.43 s激活,识别车辆无小备胎后开始轮速欠压补偿;在第28.49 s轮速欠压补偿结束,补偿系数锁定为-0.03,同时滚动半径差异识别功能退出。仿真结果表明:识别算法能在0.5 s内有效识别出是否更换小备胎,在13 s内完成轮速补偿并结束识别过程,补偿轮速与参考轮速重合度较高,小备胎识别算法识别速度较快、轮速补偿算法准确度较高。 4.3 限滑控制功能验证 设置车辆未更换备胎,以20%油门开度在路面附着系数为0.2的路面起步行驶,进行限滑控制仿真验证。 如图6所示,限滑控制功能开启,车辆以最大值为1.7 m/s2的纵向加速度行驶,0至30 km/h的起步加速时间为5 s;限滑控制功能关闭,车辆以最大值为1 m/s2的纵向加速度行驶,0至30 km/h的起步加速时间为8.7 s。仿真结果表明:限滑控制功能开启后,车辆加速能力显著提升。 如图7所示,限滑控制功能开启,转向盘转角的最大修正量为4.7°,横摆角速度的绝对值平均值为0.02(°)/s;限滑控制功能关闭,转向盘转角的最大修正量为16.1°,横摆角速度的绝对值平均值为0.16(°)/s。仿真结果表明:限滑控制功能开启后,减轻了驾驶员对转向盘的操作,车辆具有更好的直线行驶稳定性。 车辆性能提升原因如图8所示,限滑控制功能开启后,当监控到后轮滑转时,增大离合器目标传递扭矩,前、后轴同时驱动,充分发挥路面附着能力。 4.4 滚动半径差异对限滑控制的影响 设置车辆右后轮为小备胎,以50%油门开度在路面附着系数为0.9的路面起步行驶,进行无滚动半径差异识别功能、识别到小备胎后禁止限滑控制功能、识别到小备胎后降级限滑控制功能3种控制策略的功能验证。 如图9所示,车轮滑转后,限滑控制功能介入,离合器目标传递扭矩迅速增大至1 000 N·m后逐渐减小,驱动扭矩前轴为正值、后轴为负值,车轮未出现严重滑转现象。仿真结果表明:限滑控制功能有效抑制了备胎轮滑转,但在限滑控制过程中出现前轴驱动扭矩为正值、后轴驱动扭矩为负值的情况,前、后轴产生制动干涉。 如图10所示,识别出小备胎后限滑控制功能被禁止,车轮滑转后,离合器目标传递扭矩始终为0 N·m,前轴驱动扭矩始终为0 N·m,车辆后轮驱动行驶。仿真结果表明:限滑控制功能被禁止后,前、后轴无制动干涉,但备胎轮滑转率达到85%,备胎轮滑转严重。 从图11中可以看出,车轮刚开始滑转,限滑控制功能立即介入,离合器目标传递扭矩迅速增大至1 000 N·m,随后被快速限制到200 N·m,此时车轮已不滑转,离合器目标传递扭矩缓慢降至0 N·m,并退出限滑控制功能。在限滑控制过程中,备胎轮未出现严重滑转现象,前、后轴驱动扭矩均为正值。仿真结果表明:本文提出的考虑滚动半径差异的限滑控制策略,既能抑制车轮滑转,又不会产生制动干涉。 5 结束语 本文设计了基于前、后轴附着率相等的限滑前馈控制和基于轴速差的限滑反馈控制,实现了适时四驱汽车中央差速及差速限滑功能,提高了车辆在低附路面的动力性和行驶稳定性。结合小备胎识别技术和轮速补偿技术,有效避免了限滑控制功能误触发,解决了因备胎滚动半径小而导致的电控多片离合器异常磨损、烧蚀等问题,使限滑控制策略适用于量产车型。 参 考 文 献 [1] 申棋仁, 代凯, 蒲永锋, 等. 四轮驱动及其融合技术发展综述[J]. 汽车文摘, 2020(7): 17-26. SHEN Q R, DAI K, PU Y F, et al. A Review of Four-Wheel Drive and Its Fusion Technologies[J]. Automotive Digest, 2020(7): 17-26. [2] 汪文杰, 翟洪军, 金吉刚, 等. 智能四驱传动系统[J]. 机械工程师, 2011(5): 160-162. WANG W J, ZAI H J, JIN J G, et al. Intelligent 4WD Powertrain[J]. Mechanical Engineer, 2011(5): 160-162. [3] GERHARD F, WERNER P, HANS-STEFAN B, et al. xDrive The New Four-Wheel Drive Concept in the BMW X3 and BMW X5[J]. ATZ Worldwide, 2004(106): 2-5. [4] JUNJI A, TAKUYA T, HIROYUKI A, et al. Development of Third-Generation Electronically Controlled AWD Coupling with New High-Performance Electromagnetic Clutch[J]. SAE International, 2014, 7(2): 882-887. [5] BARLAGE J, MASTIE J, NIFFENEGGER D. DONN N. Development of NexTrac? Electronic Driveline Coupling for Front-Wheel Drive Based All-Wheel Drive Applications[J]. SAE Technical Paper, 2007-01-0660. [6] YUON K, SETH H, TOM C. Tire Rolling Radius Evolution with Tread Depth and the Implications for Tire Replacement on All-Wheel Drive Vehicles[J]. SAE Technical Paper, 2020-01-5070. [7] SONDKAR P, GHARPURE S, SCHRAND V, et al. Longitudinal Vehicle Dynamics Modeling for AWD/4WD Vehicles to Study Torque Split between Front and Rear Axles[J]. SAE Journal Article, 2020(1): 1410. [8] 王钰明, 王其东, 陈黎卿, 等. 电磁多片式离合器扭矩分配控制数学模型构建研究[J]. 中国科学: 技术科学, 2017(47): 472-483. WANG Y M, WANG Q D, CHEN L Q, et al. Mathematical Model Research in Electromagnetic Multi-Plate Clutch on Torque Distribution Control[J]. SCI Sin Tech, 2017(47): 472-483. [9] 王敷玟, 凌新新, 张家彬, 等. 考虑操纵稳定性的适时四驱扭矩分配策略[J]. 汽车零部件, 2020(5): 8-12. WANG F W, LING X X, ZHANG J B, et al. Real-Time Four-Wheel Drive Torque Distribution Strategy Considering Vehicle Handling Stability[J]. Automobile Parts, 2020(5): 8-12. [10] 雷北海. 适时四驱汽车轴间扭矩分配离合器扭矩特性及控制策略研究[D]. 长春: 吉林大学, 2020. LEI B H. Research on Torque Characteristics of Clutch and Control Strategy for On-demand 4WD Vehicle Based on Inter-Axle Torque Distribution[D]. Changchun: Jilin University, 2020. [11] 郑羿方, 陈庆林. 基于轮速计算的乘用车小备胎识别策略开发及应用[J]. 汽车实用技术, 2022(10): 33-37. ZHENG Y F, CHEN Q L. Strategy and Application for Passenger Car Mini Spare Tyre Detection Based on Wheel Speed Calculation[J]. Automobile Applied Technology, 2022(10): 33-37. [12] 初亮, 王彦波, 祁富伟, 等. 基于ABS轮速的车轮半径补偿方法[J]. 华中科技大学学报(自然科学版), 2012(11): 129-132. CHU L, WANG Y B, QI F W, et al. ABS Wheel Speed-Based Wheel Radius Compensation Method[J]. Journal of. Huazhong University of Science. & Technology (Natural Science Edition), 2012(11): 129-132. [13] 米奇克, 瓦伦托维兹. 汽车动力学[M]. 北京: 清华大学出版社, 2009. MITSCHKE M, WALLENTOWITZ H. Dynamik der Kraftfahrzeuge[M]. Beijing: Tsinghua University Press, 2009.
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17
汽车实用技术(2022年10期)2022-06-09
资源信息与工程(2021年5期)2022-01-15
汽车实用技术(2020年24期)2021-01-05
少儿科学周刊·少年版(2020年9期)2020-03-04
湘潮(上半月)(2019年7期)2019-05-22
家用汽车(2016年2期)2016-05-10
汽车实用技术(2015年8期)2015-12-26
课堂内外(高中版)(2015年2期)2015-09-10
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07
