
黎曼流形上的粒子群运动模型
2024-06-29 02:43:46唐伦潇蔚涛罗懋康
四川大学学报(自然科学版) 2024年3期
唐伦潇 蔚涛 罗懋康
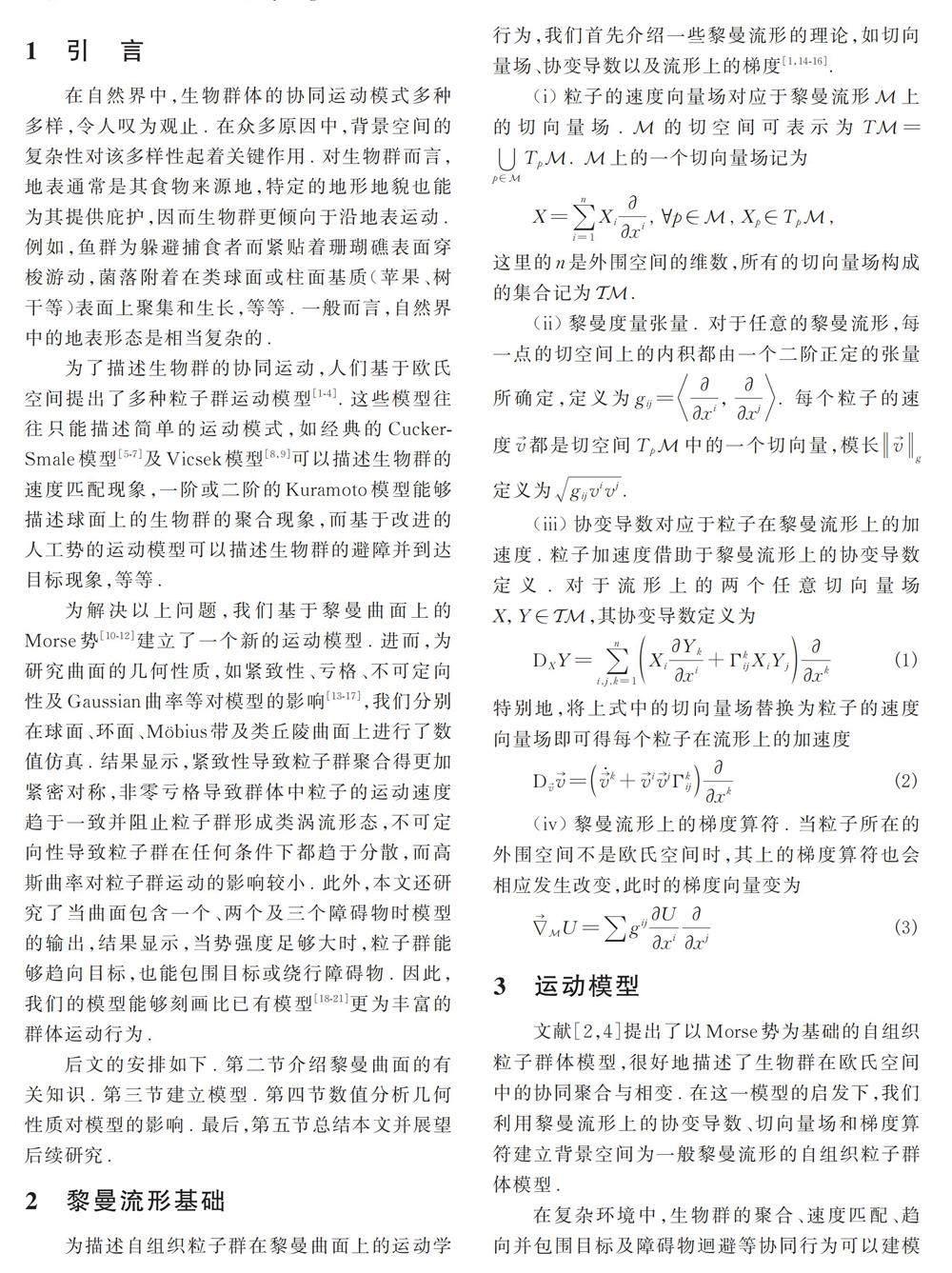
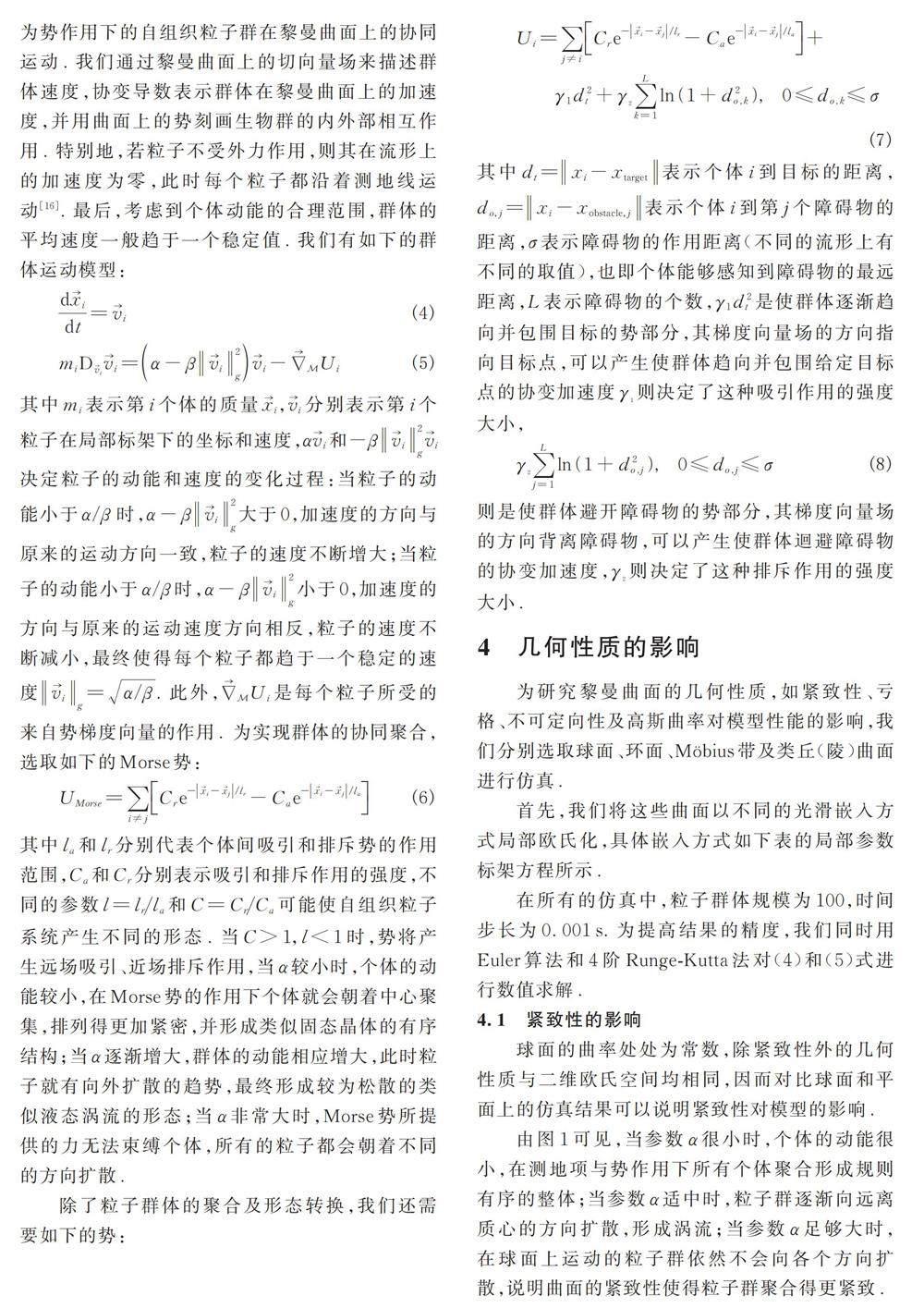
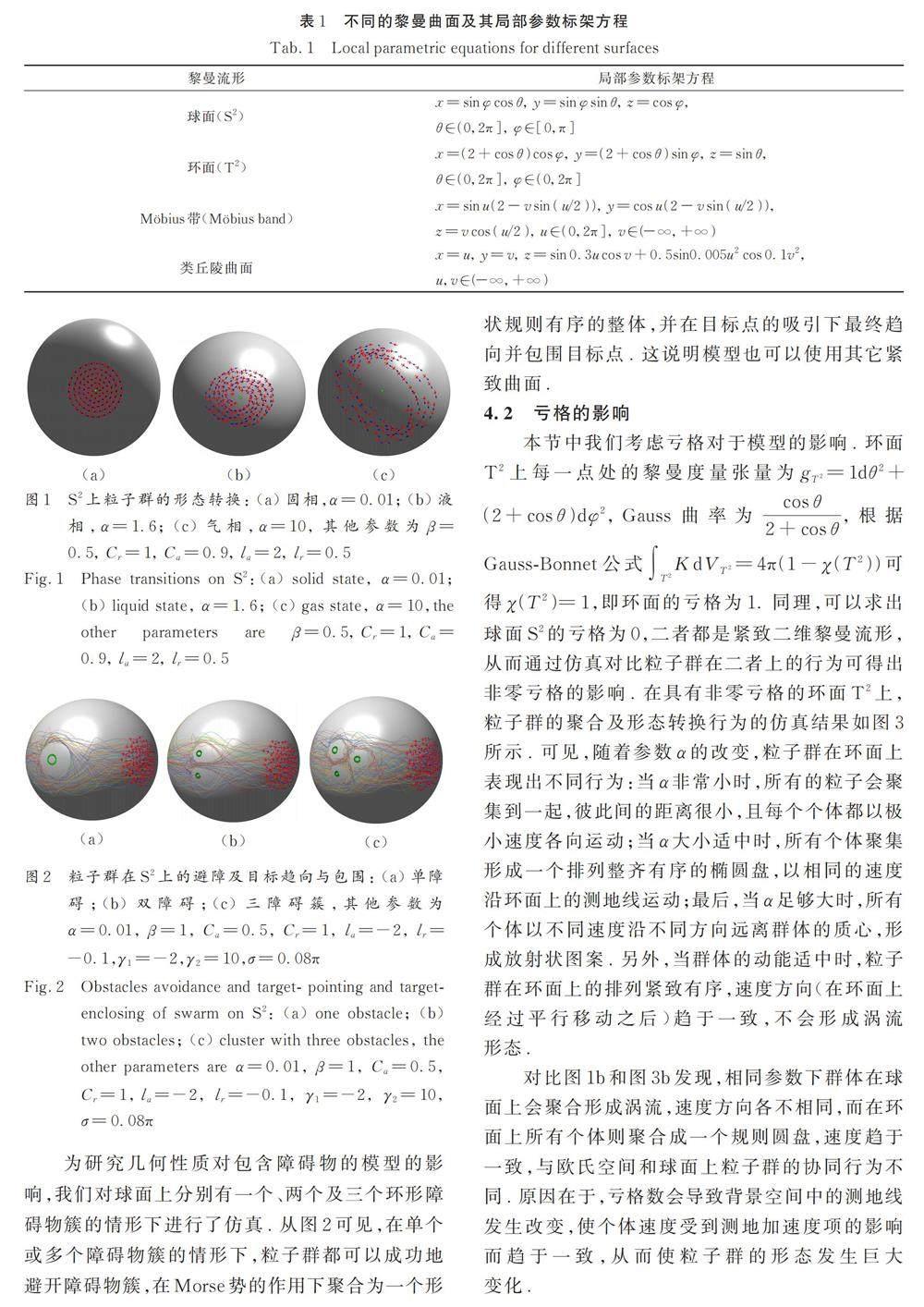
摘 要: 自然界中生物群的协同运动模式多种多样,运动空间的复杂性对该多样性起着关键作用. 为描述生物群的协调运动,人们基于欧氏空间提出了多种粒子群运动模型. 然而,这些模型往往只能描述简单的运动模式. 本文基于Morse 势和黎曼流形提出了一个新模型,该模型可以描述任意运动空间中的群体运动,且易于工程实现. 本文分别以球面、环面、M?bius 带及类丘陵曲面为代表仿真分析了黎曼曲面的紧致性、亏格、可定向性及高斯曲率等性质对模型的影响. 结果显示,紧致性导致粒子群聚合得更加紧密对称,非零亏格导致群体中粒子的运动速度趋于一致并阻止粒子群形成类涡流形态,不可定向性导致粒子群在任何条件下都趋于分散,而高斯曲率对粒子群运动行为的影响较小. 此外,本文还研究了当曲面包含一个、两个及三个障碍物时模型的输出,结果显示,当势强度足够大时,粒子群能够趋向目标,也能包围目标或绕行障碍物. 综上,相比已有模型,该模型能够描述更为丰富的运动模式.
关键词: 粒子群; 协同运动; 黎曼流形; 迴避
中图分类号: O29 文献标志码: A DOI: 10. 19907/j. 0490-6756. 2024. 031002
