基于PDR算法与伪平面技术的井下人员定位方法研究
2024-06-28 11:53李飞潘红光魏绪强陈海舰郭齐白俊明
西安科技大学学报(社会科学版) 2024年3期
关键词:惯性导航
李飞 潘红光 魏绪强 陈海舰 郭齐 白俊明


摘 要:为了降低行人航位推算(Pedestrian dead reckoning,PDR)算法在进行井下人员定位时产生的累积误差,提出了一种基于PDR算法与伪平面技术的井下人员定位方法。首先,采用惯性导航传感器获取井下人员的步态信息,通过线性步长估计模型和四元数法实现步长估计和方向估计,利用PDR算法推算人员的位置;其次,使用井下人员活动区域以及预设的标记点构建伪平面,并将井下人员位置映射到伪平面坐标上,为降低PDR算法的累积误差做准备;最后,采用SVM进行井下人员活动检测,通过转弯活动判断其是否处于特殊标记点,将PDR解算的位置与伪平面内已知转弯位置标记点进行相关性分析,完成伪平面信息与工人位置的匹配,校准并更新PDR位置,降低累积误差。结果表明:井下工人在完成单个转弯活动过程中,传统PDR算法解算位置平均误差为0.98 m,而进行伪平面修正后平均误差降低到0.31 m;在完成区域性多活动过程中,采用伪平面技术修正后的PDR平均定位误差从1.08 m降低到0.38 m。因此,所提出的井下人员定位方法有效提高了PDR算法的定位精度。
关键词:井下人员定位;惯性导航;PDR算法;伪平面技术;位置修正
中图分类号:TD 76
文献标志码:A
文章编号:1672-9315(2024)03-0587-10
DOI:10.13800/j.cnki.xakjdxxb.2024.0318开放科学(资源服务)标识码(OSID):
Research on positioning method of underground personnel in coal
mines based on PDR algorithm and pseudo-plane technology
LI Fei1,PAN Hongguang2,3,WEI Xuqiang2,3,CHEN Haijian4,GUO Qi4,BAI Junming2,3
(1.CHN Energy Shendong Coal Group Co.,Ltd.,Yulin 719315,China;
2.College of Electrical and Control Engineering,Xian University of Science and Technology,Xian 710054,China;
3.Xian Key Laboratory of Electrical Equipment Condition Monitoring and Power Supply Security,Xian 710054,China;
4.CCTEG Changzhou Research Institute,Changzhou 213025,China)
Abstract:Cumulative error occurs when pedestrian dead reckoning(PDR)algorithm is adopted to position underground personnel.To solve this problem,a personnel location method based on PDR algorithm and pseudo-plane technology is proposed in this paper.Firstly,the gait information of underground personnel is obtained by inertial navigation sensor,the step size estimation and direction estimation are achieved by linear step size estimation model and quaternion method,and the position of personnel is determined by PDR algorithm.Secondly,the pseudo-plane is constructed by using the activity area of underground personnel and the preset marking points,and the location of underground personnel is mapped to the pseudo-plane coordinates for reducing the cumulative error of PDR algorithm.Finally,SVM is used to detect underground personnel activities,and the turning activity is used to determine whether they are at special marks.A correlation analysis is performed between the position calculated by PDR and the known turning position marks in the pseudo-plane,so as to match the pseudo-plane information with the workerspositions,calibrate and update the PDR position,and reduce the accumulated errors.The experimental results show that the average position error of the traditional PDR algorithm is 0.98 m,while the average error is reduced to 0.31 m after the pseudo-plane correction.In the process of regional multi-activity,the average positioning error of PDR after calibration with pseudo-plane technology is reduced from 1.08 m to 0.38 m.Therefore,the positioning method proposed in this paper could improve the positioning accuracy of PDR algorithm effectively.
Key words:underground personnel location;inertial navigation;PDR algorithm;pseudo-plane technology;position correction
0 引 言准确的井下人员定位是矿山安全和生产管理的关键因素之一,对于优化资源分配、改善安全监控和提高应急响应能力具有重要意义。然而,井下环境的复杂性以及单一定位方法的受限等问题给井下人员定位带来了一系列挑战[1-6]。目前已存在一些井下人员定位方法,包括基于惯性测量单元(IMU)和无线传感器网络(WSN)的方法[7-8]。然而,这些方法都存在一定的局限性。其中,IMU在长时间使用中容易出现误差累积问题,导致定位精度下降[9-10]。WSN需要在矿井中布设大量的传感器节点,增加了系统复杂性和维护成本[11-12]。PARK等开发了一款基于蓝牙信标和平板电脑的矿山生产管理应用程序,通过在卡车上安装平板电脑,并使用蓝牙信标发出的信号进行定位,可以记录卡车的位置和收到信号的时间[13];CAVUR等研究了基于接收信号强度(RSS)的定位技术,并将其应用于室内环境,针对现有技术的局限性,提出并发展了一种独特的基于指纹识别的混合方法,该算法在办公环境下的定位精度为2.52 m,在地下矿井环境下的定位精度为3.13 m[14];HUSSAIN等提出了一种光辅助航位推算(LiDR)系统,使用LED照明作为高精度的定位标志,为PDR提供定期校准,估计单个行人的步长,以提高准确性,在此基础上提出了一种基于光形的航向角校正算法,以减小航向角误差,进一步提高精度,发现当最大光间距为15 m时,整个系统的整体平均精度小于0.7 m[15]。然而,在目前的定位方法中,由于井下环境的复杂性,众多定位方法易受环境干扰,且具有自身局限性,无法满足井下高精度实时定位的需求[16-19]。由于传感器的噪声和积累误差的问题,PDR算法在长时间定位中存在较大误差[20-21]。为了克服这些局限性,进一步提高井下人员定位的准确性,文中提出了一种基于PDR算法与伪平面技术的井下人员定位方法。首先,使用PDR算法,通过采集和分析人员的步行步数、步幅和方向等参数,计算出人员的位置;然后,在井下工人活动区域构建伪平面,伪平面是通过在井下环境中部署一定数量的标记点,并利用标记点之间的相对位置信息,构建的一个虚拟的平面;最后,通过将PDR算法与伪平面技术结合,利用标记点的位置信息进行误差修正,从而提高定位的准确性。
1 整体框架PDR算法与伪平面技术结合主要分为2个步骤,分别为PDR算法的位置解算和伪平面技术位置修正。位置解算主要包含步态检测、步长估计、方向估计、位置更新等步骤;位置修正主要包含伪平面构建、人员活动检测及修正等步骤。整体结构框架如图1所示。
2 PDR算法位置解算PDR算法是一种通过利用行人在步行过程中的运动传感器数据来估计其位置的技术,首先需要使用加速度计和陀螺仪等传感器来测量行人的加速度、角速度及方向角,然后通过积分这些数据来推算行人的位置[22-24]。
2.1 数据采集
2.1.1 传感器选择
PDR算法在进行航位推算之前,需要采集加速度、角速度及磁场信息等相关数据,数据采集是该算法实现的基础,为了获取井下人员的移动信息,需要选择合适的数据采集设备。文中使用WHEELTEC厂家生产的带金属外壳的N100传感器进行数据采集,如图2所示。WHEELTEC N系列惯导核心内置是一个微型、高性能的IMU核心,其高达1 000 Hz的传感器采样频率和圆锥和划船运动补偿,有较强的抗磁干扰能力[25]。N100传感器无法进行无线数据采集,因此,在数据采集之前,需要构建无线采集装置。ESP8266模块适用于各种物联网应用,所以采用ESP8266模块作为无线数据传输模块,从而实现数据的无线采集。
2.1.2 传感器安装
在惯导数据采集中,设备的正确安装对于惯导数据采集至关重要[26]。考虑到腰部的稳定性及强方向性,将传感器安装于工人的腰部,如图3所示。
2.1.3 惯导数据采集
使用Python内置的串口功能函数,配置惯导传感器串口参数,采集数据用于PDR算法实现位置解算。
2.2 步长估计PDR算法中的步长估计是指通过分析行人的步态信息,估计每一步的步长。通过分析行人的步频、步长和步行速度等步行特征,识别行人的步态[27-29]。
2.2.1 步态识别计算行人步数步行检测的目的是识别行人单步运动的开始和结束时间,行走过程中由于垂直方向的加减速周期性运动,加速度计分量呈现正负周期性变化,通过检测加速度计组件的周期性变化,可以识别人的单步运动的开始和结束时间。
对加速度数据进行均值平滑滤波处理。中值平滑是一种常用的信号处理方法,用于降低噪声的影响,使数据更加平滑[30-31]。首先使用移动中值滤波的方式,通过在数据序列中以给定的窗口大小为单位进行滑动,每次取窗口中的数据进行排序;然后选择中间值作为平滑后结果。滤波前后结果如图4所示。对加速度数据进行处理后,检测出超过阈值的峰值和低谷信息。每次检测到一组相邻的超过阈值的波峰和波谷,并且在这组波峰和波谷之间只有一个零相交时,将其视为一个步进,最后得出总的行进步数(Step_nums)。统计出步数后,
通过式(1)计算出步频如下式
SF=Step_numsTime
(1)
式中 Time为整个检测试验的消耗时间,s;SF为步频。
2.2.2 线性模型进行步长估计线性模型相对于非线性模型及AI模型计算简单,相较于常数/准数模型精度较高,因此选择线性模型[32-33]作为步长估计模型,计算方法如下式
SL=
0.7+α(H-1.75)+β
(SF-1.79)H1.75
K
(2)
式中 α,β分别为系数;H为行人身高,m;K为常数,设置为1,用于校正步长的缩放。系数α和β的值可以通过试验和数据分析得出。具体的获取方法可能因研究方法和数据集的不同而有所差异。
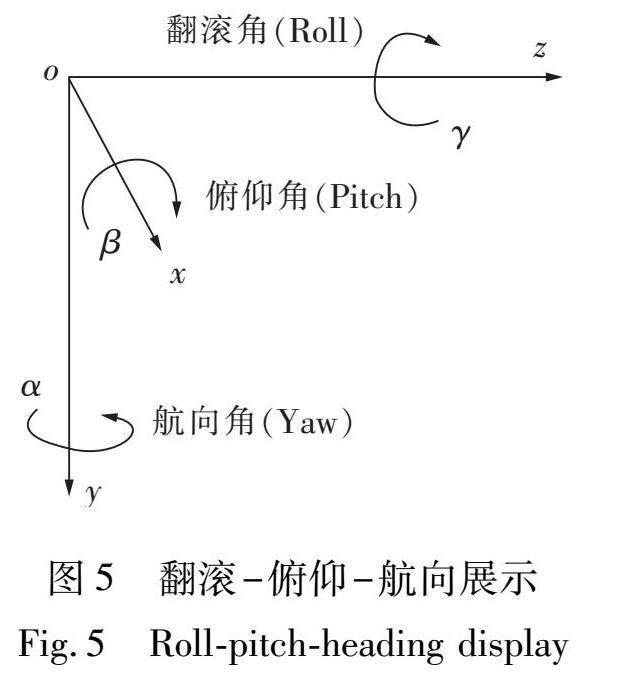
2.3 方向推算PDR算法的航向角计算是指通过传感器数据估计行人的航向角,即行走方向与参考方向之间的角度差[34-35]。根据图3中定义的方向,规定如图5所示的航向角度,航向角使用四元数法计算。
使用以下变量来进行陀螺仪数据转换为角度数据的计算。
Pitch:陀螺仪X轴的角速度(弧度/秒)Yaw:陀螺仪Y轴的角速度(弧度/秒)Roll:陀螺仪Z轴的角速度(弧度/秒)四元数法是一种用于求解方向角的数学方法,可以用于估计行走者的方向变化。四元数法的计算如下式
q=w+xi+yi+zk
(3)
式中 w为实部;x,y,z为虚部。在四元数法中,通过融合陀螺仪的角速度数据来计算方向角的变化。假设陀螺仪输出的角速度为
ωx,ωy,ωz,采样时间为Δt。四元数的更新公式如下
q′=q+(0.5×q)×Δt×[0,ωx,ωy,ωz]
(4)
式中 q′为更新后的四元数;q为上一时刻的四元数。接下来,对四元数进行归一化,使其满足单位四元数的要求如下式
q″=
q′‖q′‖
(5)
通过公式(6),可以根据陀螺仪的角速度数据来不断更新四元数,从而计算得到方向角的变化如下式
θ=atan2
2×(w×z+x×y)
1-2×(y×y+z×z)
(6)
2.4 位置估计在得到步长
SL以及航向角Yaw之后,根据式(7)进行行人位置计算如下式
xDt=xDt-1+SL×sin(θ)
yDt=yDt-1+SL×cos(θ)
(7)
式中 (xDt,yDt)为当前时刻PDR更新的位置坐标;
(xDt-1,yDt-1)
为上一时刻的位置坐标;
SL
为步长;θ为Yaw,即航向角。
3 伪平面构建及位置修正
3.1 伪平面构建工人在井下活动时,PDR算法会产生累积误差,尤其是进行转弯活动时,方向角产生的误差会严重影响PDR定位[36-37]。因此,在实时定位过程中,如果可以精确获得目前工人所在的位置,便可根据这个已知的位置信息对PDR解算的位置进行更新,从而消除此前产生的累积误差。而工人准确的位置信息需要通过一定的途径获取,工人在井下活动时,改变其位置的活动主要包括转弯和直行,如果能够识别出工人目前正在进行转弯活动,并识别出在哪个位置进行转弯活动,由此便可获得已知位置信息。基于上述分析,通过工人可能进行的活动轨迹以及轨迹上若干转弯位置标记点构成一个平面,将此平面定义为某井下人员活动区域的一个伪平面。使用人员活动检测方法检测出工人正在进行转弯活动,并将目前的PDR位置与伪平面内已知转弯位置标记点进行相关性分析,从而确认目前工人所在的准确位置,使用该位置对PDR位置进行更新,消除此前PDR的累积误差。
3.2 人员活动检测井下人员在工作时,其活动路线可分为直行和转弯2种活动[38],转弯活动的转弯角度与具体的伪平面标记点角度有关,以标记点最小转弯角度为阈值采集数据,大于该阈值则视为转弯活动,利用最小转弯角度来采集数据集。采用支持向量机(Support Vector Machine,SVM)算法来进行矿井下行人转弯和直行活动的识别。将转弯和直行活动看作2个不同的类别,通过训练样本数据进行模型训练,得到准确识别人员活动的支持向量机模型。
3.2.1 数据预处理将采集到的数据进行预处理,预处理过程包括时间对齐、数据滤波和标签标记3个过程。首先在数据采集过程中,由于传感器自身影响,可能存在某一项数据丢失或者偏差较大的问题,因此对采集到的数据进行时间对齐处理,修正存在的坏值,消除在后续位置解算过程中出现数据不匹配的问题;其次对时间对齐后的数据进行均值平滑滤波;最后对采集的转弯和直行数据进行标签化处理,构建分类器的训练集和测试集。
3.2.2 行人活动检测采用SVM算法实施行人活动检测,具体过程如下。假设训练集为
D={(x(n),y(n))}Nn=1,其中
y(n)
为样本的标签,文中分类活动为直行和转弯,定义标签为-1,1,因此
y(n)∈{-1,1}
。假设分类任务是线性可分的,则存在一个超平面如下式
wTx+b=0
(8)
式中 w为法向量;b为偏置项。需完成2类样本之间相互分开,那么对于每个样本都存在式(9)所示的关系如下式
y(n)(wTx(n)+b)>0
(9)
数据集
D中每个样本x(n)到分割超平面的距离如下式
γ(n)
=
‖wTx(n)+b‖
‖w‖
=
y(n)(wTx(n)+b)
‖w‖
(10)
进一步地,超平面可以表示如下式
wT×ψ(x)+b=0
(11)
式中 ψ(x)为将样本x映射到高维特征空间的函数。决策函数可以表示如下式
f(x)=sign(wT×ψ(x)+b)
(12)
最优超平面的目标函数为
min
‖w‖2
2+C×∑ξn
(13)
式中 C为正则化参数,用于平衡间隔损失和间隔错误的权重;
ξn
为松弛变量,表示样本的分类错误度。约束条件为
y(n)(wT×ψ(x(n))+b)≥1-ξn,
ξn≥0。
3.3 位置修正在识别到工人进行转弯活动时,通过式(14)进行转弯位置与伪平面内标记点相关性判断,从而通过伪平面内标记的转弯位置信息得出工人目前准确的所在位置如下式
dep=(x1-xi)2+
(y1-yi)2
(14)
表1为工人在井下活动时,伪平面修正位置的过程。
4 试验与分析
4.1 试验环境试验在西安科技大学煤炭主体专业综合试验实训中心进行,试验人员身体健康,行走正常,具体信息见表2。
4.2 行人活动检测在行人活动检测试验中,10名试验者分别完成直行和转弯活动。每个活动持续4 s,每名试验者采集直行400次和转弯400次。使用SVM分类器进行活动分类。将采集到的数据样本以5∶5的比例用于模型训练和测试,即200组训练数据,200组测试数据。识别结果见表3。
由表3中数据可看出,在二分类活动检测中,直行活动检测平均准确度高达99.25%,转弯活动检测平均准确度高达99.42%。这表明该分类模型可以完成工人在井下区域内的活动检测。在保证检测准确的前提下,可以对PDR位置通过特殊标记点进行位置修正。
4.3 位置修正与结果分析首先对活动检测与伪平面修正的过程进行试验,然后在工人活动区域内进行整体的路线试验,完成位置修正测试。伪平面共包含5个特殊标记点,标记点信息见表4。
4.3.1 局部转弯修正进行实时试验来验证活动检测与伪平面修正的可行性。试验者将惯性导航传感器模块固定于腰间,进行转弯活动,完成伪平面修正试验,实现对PDR位置的修正。具体误差结果见表5。
图6所示为试验人员位置修正前后结果对比,当井下工人在进行转弯活动时,由于转弯的活动较为复杂,在转弯处会存在较大的定位误差,严重偏离红线展示的实际位置坐标,且此误差会一直存在于之后的活动中。进行伪平面修正之后,可以在转弯标记处进行PDR解算位置的修正,消除此前的累积误差,从图6中蓝色线条可看出,在伪平面修正之后基本不偏离真实路径。
4.3.2 区域多活动测试
试验人员在规定的活动路线进行活动,并记录PDR数据,通过PDR算法对试验人员位置进行解算,得到其位置具体定位结果见表6。将6名试验人员的位置坐标进行平均处理,如图7中绿色表示PDR解算路径,红色表示人员实际进行的路径,从图中可看出,在短期定位过程中(0到50),PDR的解算位置与实际位置基本一致,轨迹基本重合,随着转弯活动的进行,PDR解算位置与实际位置之间会出现较大的轨迹误差,且该误差一直存在,且随着行人行走时间的增加,PDR的累积误差开始出现,PDR定位轨迹与实际轨迹的偏差越来越大。
通过特殊标记点的位置信息对PDR解算位置进行修正,如图7中蓝色轨迹表示修正后PDR路径,可看出在进行伪平面修正后,活动轨迹几乎一直与真实轨迹重合,这表明伪平面可以修正PDR在位置解算过程中的累积误差。通过计算,未进行伪平面修正的PDR平均定位误差为1.08 m,伪平面修正后的PDR平均定位误差为0.38 m,整体定位精度提高了0.7 m。与其他方法相比,文中方
法具有较高的定位精度,不同方法结果对比见表7。
4.4 讨论
1)试验在模拟矿井实验室进行,但其同样适用于更大规模或实际矿井环境中,文中方法定位过程无需无线信号的传输,因此也避免了在大规模矿井中多径效应及信号传输技术的影响。
2)文中方法的稳定性和有效性依赖于惯导数据采集的准确性以及伪平面搭建的合理性,而数据的采集和伪平面的搭建受井下环境影响并不大,因此,文中方法在其他井下环境同样稳定且有效。
3)目前伪平面对PDR定位的修正只是通过转弯处的约束来进行的,并没有实时进行PDR定位的修正,未来可通过在伪平面内构建更多的约束条件(如某一段巷道的位置以及宽度等约束)来进行工人位置的约束,从而对PDR解算工人位置进行实时的校正。
5 结 论1)通过PDR算法推算人员初步位置。使用SVM检测工人正在进行转弯活动,并将目前的PDR位置与伪平面内已知转弯位置标记点进行相关性分析,从而确认目前工人所在的准确位置,使用该位置对PDR位置进行更新,降低PDR的累积误差。2)在完成单一转弯活动过程中,与传统PDR算法解算位置相比,伪平面修正后PDR定位平均误差从0.98 m降低到0.31 m;在完成区域性多活动过程中,采用伪平面技术修正后的PDR平均定位误差从1.08 m降低到0.38 m。3)提出的伪平面修正PDR的定位方法在转弯处对井下人员位置进行修正,在一定程度上提高了PDR的定位精度,但是其无法实时对位置进行修正,未来的研究可以进一步完善伪平面的构建以及人员活动检测,解决无法实时修正的问题。
参考文献(References):
[1] 李锋.煤矿井下精确定位技术现状及应用[J].工矿自动化,2023,49(S1):44-46.LI Feng.Current status and application of precise positioning technology in coal mines[J].Industrial and Mining Automation,2023,49(S1):44-46.
[2]GENG J,YU X,WU C,et al.Research on pedestrian indoor positioning based on two-step robust adaptive cubature kalman filter with smartphone MEMS sensors[J].Micromachines,2023,14(6):1252.
[3]ZARE M,BATTULWAR R,SEAMONS J,et al.Applications of wireless indoor positioning systems and techno-logies in underground mining:A review[J].Mining,Metallurgy & Exploration,2021,38:2307-2322.
[4] 马军爽.基于Zigbee技术和GPS相结合的井下人员定位系统研究[J].煤矿机械,2014,35(9):238-241.MA Junshuang.Research on underground personnel positioning system based on Zigbee technology and GPS[J].Coal Mine Machinery,2014,35(9):238-241.
[5]SHAO X,ZHAO Y,GUO D,et al.Research progress of personnel positioning technology in coal mine based on UWB[C]//2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference(ITAIC).IEEE,2022,10:2474-2480.
[6]KUNHOTH J,KARKAR A G,AL-MAADEED S,et al.Indoor positioning and way finding systems:A survey[J].Human-centric Computing and Information Sciences,2020,10(1):1-41.
[7]POPESCU D,STOICAN F,STAMATESCU G,et al.A survey of collaborative UAV WSN systems for efficient monitoring[J].Sensors,2019,19(21):4690.
[8]CANDAN B,SOKEN H E.Robust attitude estimation using IMU-only measurements[J].IEEE Transactions on Instrumentation and Measurement,2021,70:1-9.
[9]MATHIAS B,ROMAIN G,RMY H,et al.IMU positioning affects range of motion measurement during squat motion analysis[J].Journal of Biomechanics,2023,153:111598-111603.
[10]JARAMILLO I E,CHOLA C,JEONG J G,et al.Human activity prediction based on forecasted IMU activity signals by sequence-to-sequence deep neural networks[J].Sensors,2023,23(14):6491.
[11]曹俊俊.基于WSN的井下人员定位技术研究与实现[D].邯郸:河北工程大学,2022.CAO Junjun.Research and implementation of underground personnel location technology based on WSN[D].Handan:Hebei University of Technology,2022.
[12]SHAFIQ M,ASHRAF H,ULLAH A,et al.Systematic literature review on energy efficient routing schemes in WSN:A survey[J].Mobile Networks and Applications,2020,25:882-895.
[13]PARK S,CHOI Y.Bluetooth beacon-based mine production management application to support ore haulage o-perations in underground mines[J].Sustainability,2021,13(4):2281.
[14]CAVUR M,DEMIR E.RSSI-based hybrid algorithm for real-time tracking in underground mining by using RFID technology[J].Physical Communication,2022,55:101863.
[15]HUSSAIN B,WANG Y,CHEN R,et al.Lidr:Visible-light-communication-assisted dead reckoning for accurate indoor localization[J].IEEE Internet of Things Journal,2022,9(17):15742-15755.
[16]HAN Y,YU X,ZHU P,et al.A fusion positioning method for indoor geomagnetic/light intensity/pedestrian dead reckoning based on dual-layer tent atom search optimization back propagation[J].Sensors,2023,23(18):7929.
[17]TORRES S J,CHAU T.Wearable indoor pedestrian dead reckoning system[J].Pervasive and Mobile Computing,2010,6(3):351-361.
[18]康俊瑄.基于微型惯性传感器的井下人员跟踪定位系统[J].中国安全生产科学技术,2023,19(1):73-78.KANG Junxuan.Underground personnel tracking and positioning system based on micro inertial sensors[J].China Safety Production Science and Technology,2023,19(1):73-78.
[19]孙延鑫,毛善君,苏颖,等.改进的井下人员定位PDR算法研究[J].工矿自动化,2021,47(1):43-48.SUN Yanxin,MAO Shanjun,SU Ying,et al.Research on improved PDR algorithm for underground personnel location[J].Industrial and Mine Automation,2021,47(1):43-48.
[20]MARTINELLI A,GAO H,GROVES P D,et al.Probabilistic context-aware step length estimation for pedestrian dead reckoning[J].IEEE Sensors Journal,2017,18(4):1600-1611.
[21]LI Y T,CHEN G,SUN M T.An indoor collaborative pedestrian dead reckoning system[C]//2013 42nd International Conference on Parallel Processing.IEEE,2013:923-930.
[22]XU X,LIN L.Geomagnetic fingerprint maps for indoor positioning[C]//2017 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery(CyberC).IEEE,2017:134-141.
[23]SUN M,WANG Y,XU S,et al.Indoor positioning integrating PDR/geomagnetic positioning based on the genetic-particle filter[J].Applied Sciences,2020,10(2):668.
[24]WANG W,WANG C,WANG Z,et al.An improved PDR localization algorithm based on particle filter[J].Computing and Informatics,2020,39(1-2):340-360.
[25]JIANG W,TAN X.Low cost inertial sensor attitude fixation algorithm and accuracy analysis[J].Advances in Space Research,2023,72(6):2270-2282.
[26]邹志峰,缪建成,乐晋.激光惯性导航设备安装标校技术研究[J].光学与光电技术,2020,18(6):91-97.ZOU Zhifeng,MIAO Jiancheng,Le Jin.Research on ca-libration technology of laser inertial Navigation Equipment installation[J].Optics and Opto-Electronics Technology,2020,18(6):91-97.
[27]WU Y,CHEN R,FU W,et al.Indoor positioning based on tightly coupling of PDR and one single WiFi FTM AP[J].Geo-spatial Information Science,2023,26(3):480-495.
[28]JIANG C,CHEN Y,LIU Z,et al.A probabilistic method-based smartphone GNSS fault detection and exclusion system utilizing PDR step length[J].Remote Sensing,2023,15(20):4993.
[29]WANG L,ZHANG S,QI J,et al.Research on IMU-assisted UWB-based positioning algorithm in underground coal mines[J].Micromachines,2023,14(7):1481.
[30]魏挺.基于平滑滤波处理的图像插值通用方法[J].舰船电子工程,2019,39(12):133-136,169.WEI Ting.A general method of image interpolation based on smoothing filter processing[J].Ship Electronic Engineering,2019,39(12):133-136,169.
[31]淡州阳,刘粉林,巩道福.基于差分直方图中尾部信息的平滑滤波检测算法[J].计算机科学,2021,48(11):234-241.
DAN Zhouyang,LIU Fenlin,GONG Daofu.A smooth filter detection algorithm based on tail information in differential histogram[J].Computer Science,2021,48(11):234-241.
[32]代晓霁,李敏,徐天河,等.复杂环境下的UWB/PDR紧组合定位方法[J].导航定位学报,2022,10(6):18-26.DAI Xiaoji,LI Min,XU Tianhe,et al.UWB/PDR compact combination positioning method in complex environments[J].Journal of Navigation and Positioning,2022,10(6):18-26.
[33]陈锐志,郭光毅,叶锋,等.智能手机音频信号与MEMS传感器的紧耦合室内定位方法[J].测绘学报,2021,50(2):143-152.CHEN Ruizhi,GUO Guangyi,YE Feng,et al.Indoor localization method of smart phone audio signal and MEMS sensor with tight coupling[J].Journal of Surveying and Mapping,2021,50(2):143-152.
[34]LONG K,SHEN C,TIAN C,et al.Single UWB anchor aided PDR heading and step length correcting indoor localization system[J].IEEE Access,2021,9:11511-11522.
[35]ZHANG W,WEI D,YUAN H.The improved constraint methods for foot-mounted PDR system[J].IEEE Access,2020,8:31764-31779.
[36]JIANG C,CHEN Y,CHEN C,et al.Smartphone PDR/GNSS integration via factor graph optimization for pedestrian navigation[J].IEEE Transactions on Instrumentation and Measurement,2022,71:1-12.
[37]LEE J H,PARK C G.Mitigation of a heading drift in pedestrian dead-reckoning caused by the sensor bandwidth[J].International Journal of Control,Automation and Systems,2021,19(8):2882-2890.
[38]YAN D,SHI C,LI T.An improved PDR system with accurate heading and step length estimation using handheld smartphone[J].The Journal of Navigation,2022,75(1):141-159.
[39]李金昆,修春娣,杨东凯.基于UWB/PDR/地磁的地下空间多源融合定位方法[C]//中国高科技产业化研究会智能信息处理产业化分会.第十六届全国信号和智能信息处理与应用学术会议论文集.北京航空航天大学电子信息工程学院,2022:6.LI Jinkun,XIU Chundi,YANG Dongkai.Multi-source fusion location method of underground space based on UWB/PDR/Geomagnetic[C]//Intelligent Information Processing Industrialization Branch of China High-tech Industrialization Research Society.Proceedings of the 16th National Conference on Signal and Intelligent Information Processing and Application.School of Electronic Information Engineering,Beihang University,2022:6.
[40]周孟然,黄曼曼,闫鹏程,等.改进加权质心算法用于煤矿井下人员精准定位[J].安徽理工大学学报(自然科学版),2020,40(1):1-5,15.ZHOU Mengran,HUANG Manman,YAN Pengcheng,et al.Improved weighted centroid algorithm for accurate location of personnel in coal mine[J].Journal of Anhui University of Science and Technology(Natural Science Edition),2020,40(1):1-5,15.
[41]倪云峰,王志刚,王静,等.基于RSSI的井下人员定位算法改进[J].无线电工程,2023,53(3):663-668.NI Yunfeng,WANG Zhigang,WANG Jing,et al.Improvement of downhole personnel location algorithm based on RSSI[J].Radio Engineering,2023,53(3):663-668.
(责任编辑:高佳)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年1期)2019-05-21
中国惯性技术学报(2019年1期)2019-05-21
中国设备工程(2019年20期)2019-01-19
导航与控制(2017年6期)2017-12-20
中国惯性技术学报(2015年1期)2015-12-19