城市轨道交通线网站台门施工智能管控技术研究
2024-06-01 11:14:29汪琴罗小华
现代信息科技 2024年4期
汪琴 罗小华
收稿日期:2023-07-10
基金项目:湖北省教育厅科学技术研究项目(B2021413);国家科技部创新方法工作专项(2020IM020800)
DOI:10.19850/j.cnki.2096-4706.2024.04.031
摘 要:城市轨道交通线网全线站台门数量多,按站点离散分布,安装施工任务重,管理难度大。文章研究了城市轨道交通线网站台门施工智能管控技术,包括采用图像识别技术对施工安全进行智能管控,采用虚拟安装技术对施工全过程进行质量和进度管控,提出改进蚁群算法对传统站台门门体结构安装工艺流程进行重新规划,有效提升施工效率与质量,减少安装损耗,为智慧城轨的发展提供解决方案。
关键词:城市轨道交通;站台门;图像识别;虚拟安装;安装规划
中图分类号:TP39 文献标识码:A 文章编号:2096-4706(2024)04-0147-06
Research on Intelligent Management and Control Technology for Platform Door Construction of Urban Rail Transit Network
WANG Qin1, LUO Xiaohua2
(1.Wuhan City College, Wuhan 430083, China; 2.China Railway Siyuan Survey and Design Group Co., Ltd., Wuhan 430063, China)
Abstract: The entire line of urban rail transit network has alarge number of platform doors, is distributed discretely by stations, has heavy installation and construction tasks, and is difficult to manage. This paper studies the intelligent management and control technology for the construction of platform doors in urban rail transit network, including the use of image recognition technology for intelligent management and control of construction safety, and the use of virtual installation technology for quality and progress management and control throughout the construction process. It proposes an improved Ant Colony Optimization algorithm to re-plan the installation process of traditional platform door structures.It effectively improves construction efficiency and quality, reduces installation losses, and provides solutions for the development of smart urban rail.
Keywords: urban rail transit; platform door; image recognition; virtual installation; installation planning
0 引 言
站臺门起着隔绝轨行区与站台公共区热量交换以及保护乘客候车安全的作用,在城市轨道交通车站中大量运用。国家“十四五规划”中提出城市轨道交通新增运营里程3 000千米,站台门将迎来更为广阔的市场。站台门通常以每个滑动门为一个单元进行划分,每个单元结构包括承重结构、玻璃、门槛、顶箱、驱动机构、底座等,按B型车6辆编组进行计算,一个站至少有48个门单元,按全线20个站进行计算,则全线有960个站台门门单元,数量众多、安装施工任务繁重,且各种单元施工过程中相互交叉进行,需要合理安排施工顺序;同时,站台门为轨旁施工,对施工安全性要求高。
目前,国内外对于站台门的施工管理主要靠人工进行调配、对于现场的控制主要采用监理以及施工单位的人工管控方式,对于进度的控制、物料的安排等难以做到全线施工全局最优,并且施工现场的人力物力施工管理成本高。2020年,国家13部门联合提出要加大智能建造在工程中的应用[1,2],因此,本文拟搭建城市轨道交通线网站台门智慧施工管理系统,建立施工现场的BIM模型,通过现场采集数据驱动模型实时反映施工动态及进度,并从全线施工的角度进行安装方案的决策与优化,进而达到对施工全过程实时管控的目的。
1 站台门智慧施工管理架构设计
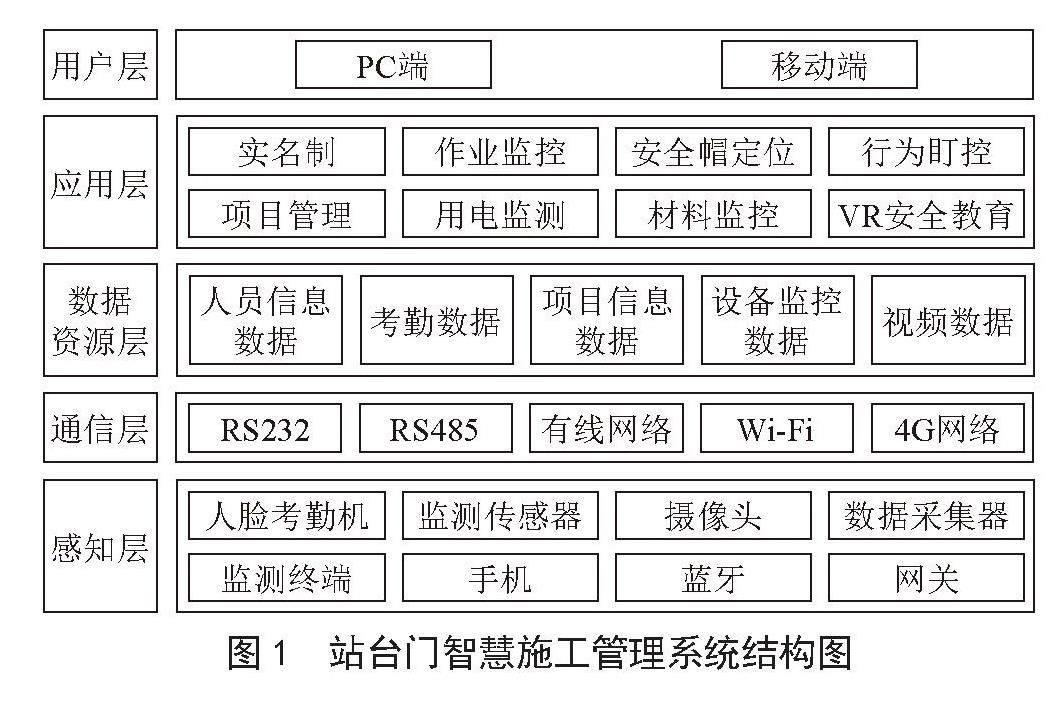
城市轨道交通线网站台门智慧施工管理结构如图1所示,分为感知层、通信层、数据资源层、应用层、平台层以及用户层。
1)感知层:负责对现场作业人员、工程进度进行感知,包括人脸识别及考核、防护服与安全帽的穿戴、作业行为的识别、作业进度的感知等。
2)通信层:主要对现场采集的数据进行实时传输。
3)数据资源层:建立标准化的数据结构,感知层的数据经通信层传输到此层,并按照标准进行自动分类保存。
4)应用层:为用户提供各种应用服务,包括实名制管理、进度监控、安全帽定位、行为盯控、项目管理、用电监测、材料监控以及VR安全教育等。
5)用户层:包括PC端以及移动端两种类型,其中PC端主要为管理人员及远程指挥人员使用,移动端主要为现场工作人员使用。
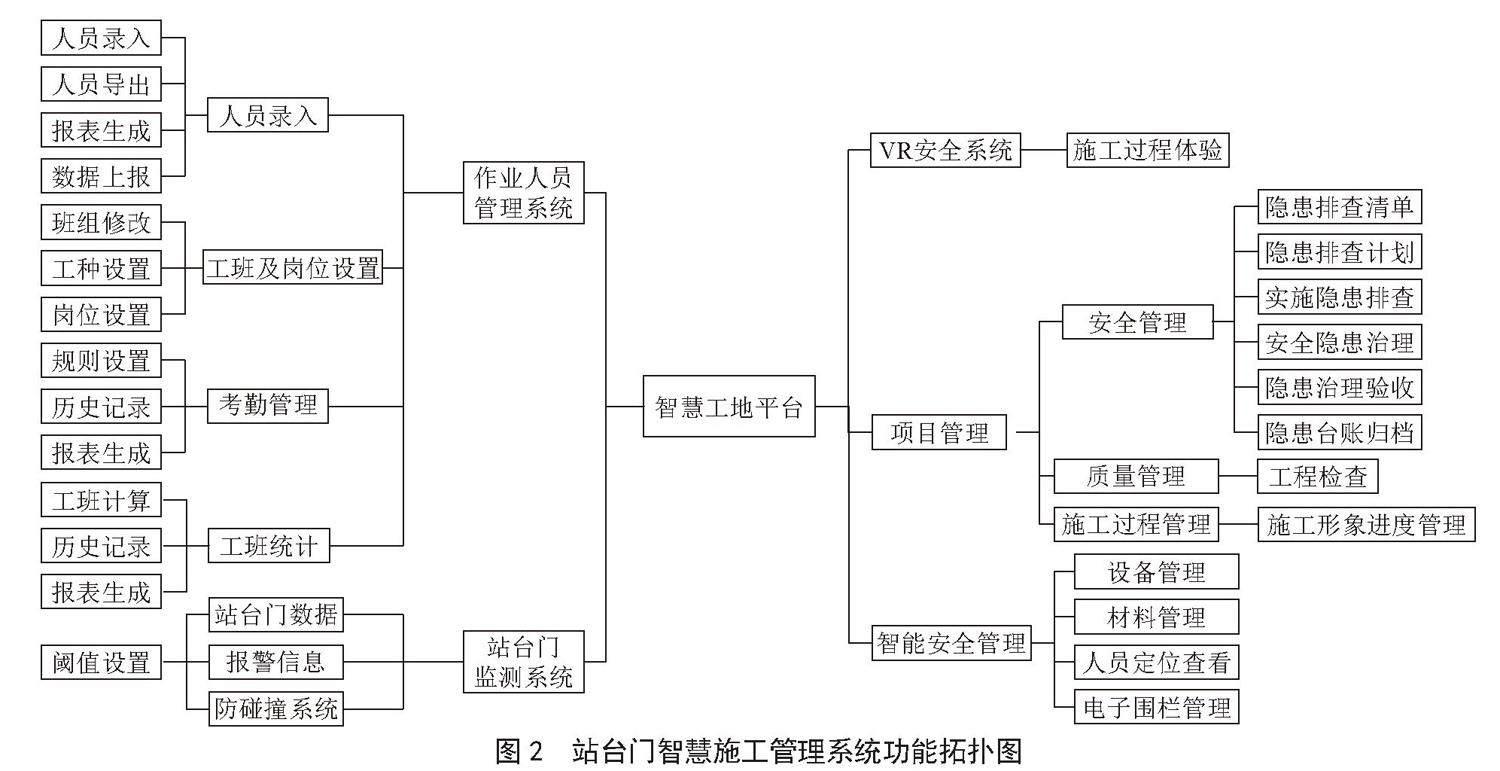
根据站台门施工特点,建立城市轨道交通线网站台门智慧施工架构的功能拓扑图[3]组成如图2所示。
图1 站台门智慧施工管理系统结构图
2 基于图像识别的站台门施工安全管理技术
采用视频图像目标的检测方法[4,5],实现对站台门施工人员不安全行为的识别,其原理是:通过对实时视频每秒截取一帧最清晰的图片,传输到视觉算法中,首先对图片进行前景检测,识别缺陷区域,在此过程中加入阴影抑制、噪点抑制、画面增强等图像级优化;然后通过图形分割、SVM分类器、神经网络、卷积神经网络等方法对前景进行特征检测,识别出缺陷目标;然后对目标物进行标记,常用的方法有CMT、meanshift、TLD、卡尔曼滤波等,在标记过程中不断更新背景模型,将目标物和背景进行分离,提高检测效果。
对于一些检测类的算法如缺陷检测,通过前景检测技术,进行背景分离后即可进入事件检测阶段,自动检测图片中缺陷信息,并完成提醒、统计和标记功能。
视觉算法工作流程框架分为前景检测、目标检测、目标分割等几个部分,如图3所示。
图3 视觉算法工作流程框架图
1)前景检测:当图片的某个区域变化比较频繁时,这块区域称为前景团块,就会被识别并分离出来。
2)目標检测:在图像序列中,部分前景团块的状态是稳定的,认定这些前景团块为缺陷目标,并提取出来。
3)目标分割技术:分析出识别目标对应的部分,并从背景图像里分割出来。
视觉算法系统架构:主要由高清数字监控摄像机、流媒体服务器、视觉算法服务器、Web管理平台服务器等子系统等组成[6]。系统最大化的利用前端视觉设备,在此基础上搭建流媒体和算法调度层,以及Web管理后台,使简单操作成为重中之重,减少复杂的配置设置,简化设置和操作。
站台门施工人员主要的安全识别对象有安全帽、高空作业工作服、工作鞋、脚手架、围栏等。如图4所示,该模块能识别到站台门施工人员的安全帽,若施工人员未按要求佩戴安全帽,系统会报警,并显示该人员信息。模块识别精度能达到90%以上,能够有效保障站台门施工安全。
图4 站台门施工安全帽识别图片
3 基于虚拟安装的站台门施工过程管控技术
3.1 站台门虚拟安装模块的架构
用参数化建模方法,快速建立站台门三维BIM模型[7,8],通过渲染程序模拟站台门BIM模型在真实环境条件下的外观状态,通过BIM模型拆解程序仿真自动扶梯和电梯的设备零部件安装工序,展示设备的施工过程及完工状态,进而实现地铁车站站台门BIM仿真模拟环境中的虚拟安装[9],如图5所示。
图5 站台门虚拟安装技术路线
构建沉浸式的虚拟安装模块,实现虚拟安装过程的参与,通过施工现场施工监测,虚实模型交互,保持站台门的施工处于健康可控状态。采用多层结构体系作为系统的构架形式,从结构分层划分主要包括人机交互层、仿真数字模型层、仿真运行支撑层、数据库系统,如图6所示。
图6 站台门虚拟安装模块结构示意图
1)人机交互层主要包括二维态势GUI、三维视景GUI、系统管理GUI、控制接口等部分,主要为系统使用人员、系统管理人员、系统评估人员、其他交互设备及系统等用户提供可视化的交互使用界面。
2)仿真数字模型层主要是负责建立具体仿真应用中各仿真对象模型,主要有仿真对象数学模型、环境及其他公用模型、RTI接口封装和扩展等,本层作为仿真对象的直接实现,是仿真应用功能的主要内容,同时在本层实现的底层接口封装可提高应用的扩展性,以至形成底层透明的中间层应用框架。
3)仿真运行支撑层包括支持分布式仿真运行的中间件、引擎、API等,主要有运行时支撑环境、图形引擎、系统服务、系统API等部分,它提供了仿真系统运行所需的分布式互连服务、图形渲染、数据服务、系统功能调用等底层功能。
4)数据库系统负责仿真模型数据、环境数据、配置参数、用户数据等的存放管理,进一步发展出数据分析和挖掘功能后,还可以提供仿真数据评估、仿真流程优化、环境影响分析、实测数据对比等多方面分析功能,从而实现对抗仿真的数据化、自动化、科学化。
3.2 站台门虚拟安装模块的开发应用
基于BIM的站台门虚拟安装模块采用如图7所示的技术框图进行开发,由虚拟仿真内容制作工具、工业仿真平台等系统组成研发创作环境,用于研发、创作虚拟仿真系统中的数字化内容。虚拟仿真开发工具及引擎环境利用虚拟仿真的数字化内容,结合基础语言平台研发环境进行系统开发。
站台门虚拟安装模块实施于标准以太网(局域网),组成设备包括终端(分为桌面终端、VR互动终端、AR/MR互动终端)、集控管理端及动作捕捉设备,有关组网必备的布线、交换以及对多人展示配置的投影或大屏设备等(图8)。最终建立站台门BIM虚拟安装模型如图9所示。
图7 站台门虚拟安装模块开发技术框架图
图8 VR/AR系统及联网协同
图9 站台门虚拟安装模型
4 基于改进蚁群算法的站台门安装规划技术
站台门每个门单元安装包括门框、玻璃、门机、立柱等各种部件,以6辆编组B型车为例,全线20个站则有960个门单元,零部件众多,且每种零部件安装所需的时间、工装以及人员均不同,根据相关统计,在产品的整个生产周期中,安装过程大约耗费35%左右的人力、占用40%左右的工作时间,消耗30%左右的总生产成本。本文基于蚁群算法提出了一种站台门安装规划方法。
4.1 零部件的安装关系分析
根据站台门的BIM模型建立各个零部件之间的安装联接关系图,图10为站台门某个零部件的安装联接关系图,图中圆圈代表零件,零部件之间的联接关系用Ci表示。采用如图11所示基础件识别算法,识别基础件的安装联接特性和各项物理特征。
图10 安装联接关系图
图11 基础件识别算法流程图
4.2 零部件安装影响矩阵建立
建立零部件之间的安装影响矩阵。影响安装的主要因素包括:安装操作便利的程度、安装过程的重定向性以及安装工具的适用性。
安装操作便利程度主要通过零部件的质量和尺寸进行衡量,如果质量过大或者过小、尺寸过大或者过小,都不利于安装的进行,需要先进行安装。通过对站台门零部件的质量和尺寸分别进行排序,从大到小进行打分,作为安装的影响系数fij (m)。
安装操作的重定向性,指的是两个零部件在安装过程中是否需要重新调整安装方向,如果需要重新调整,则fij (t)为1,否则为0。
安装工具的适用性,指的是在安装过程中是否需要更换安装工具,如果需要更换,则影响系数fij (d)为1,否则为0。
两零件安装的影响系数为:
fij (p) = w1 · fij (m) + w2 · fij (t) + w3 · fij (d) (1)
式中:w1 + w2 + w3 = 1。
4.3 站台门安装规划方法改进
采用改进的蚁群算法对站台门的安装进行重新规划[10]。以基础件作为蚁群算法的起点,基础件通过前述的流程获得。根据安装连接矩阵,确定下一个零件的选择,在确定零件时,需要根据前述的安装操作便利系数、安装方向以及安装工具影响系数共同决定:
(2)
式中:; 表示t时刻蚂蚁k由上一安装零件pi到下一零件pj的转移概率; 表示t时刻路径(i,j)上的信息素浓
度;fj (m)、fj (l)分别表示的是零件pj质量、最大尺寸对安装操作便利性,即零件级安装代价;fj (m)、fj (l)以及fij (d)、fij (t)分别表示的是零件pj相对于零件pi的重定向性、工具的适用性,即路径(i,j)上的序列级安装代价;参数α、β分别是信息素浓度、期望启发信息的因子、均为非负数。
1)局部信息素更新。采用信息素更新策略,更新蚂蚁已经搜索过路径的信息素,减少该路径的吸引力,保证计算结果的多样性,避免过早的收敛。
(3)
式中:ρ表示信息素局部挥发系数,ρ的取值范围为(0,1);τ表示初始信息素的大小。
2)让所有蚂蚁都经历一次搜索,然后制定全局信息素更新策略,更新所有信息素。
(4)
式中:;;γ表示信息素全局挥发系数,取值范围为(0,1); 表示路径(i,j)上累计增加的信息素总量; 表示在t和(t + n)时间内,蚂蚁k在路径(i,j)上留下的信息素;Q表示信息素调节参数,一般取Q=1.0;f表示蚂蚁k完成一次搜索耗费的安装代价。
3)计算当前方案的代价,当达到最大循环次数或者安装方案代价基本稳定时,输出最优安装序列。
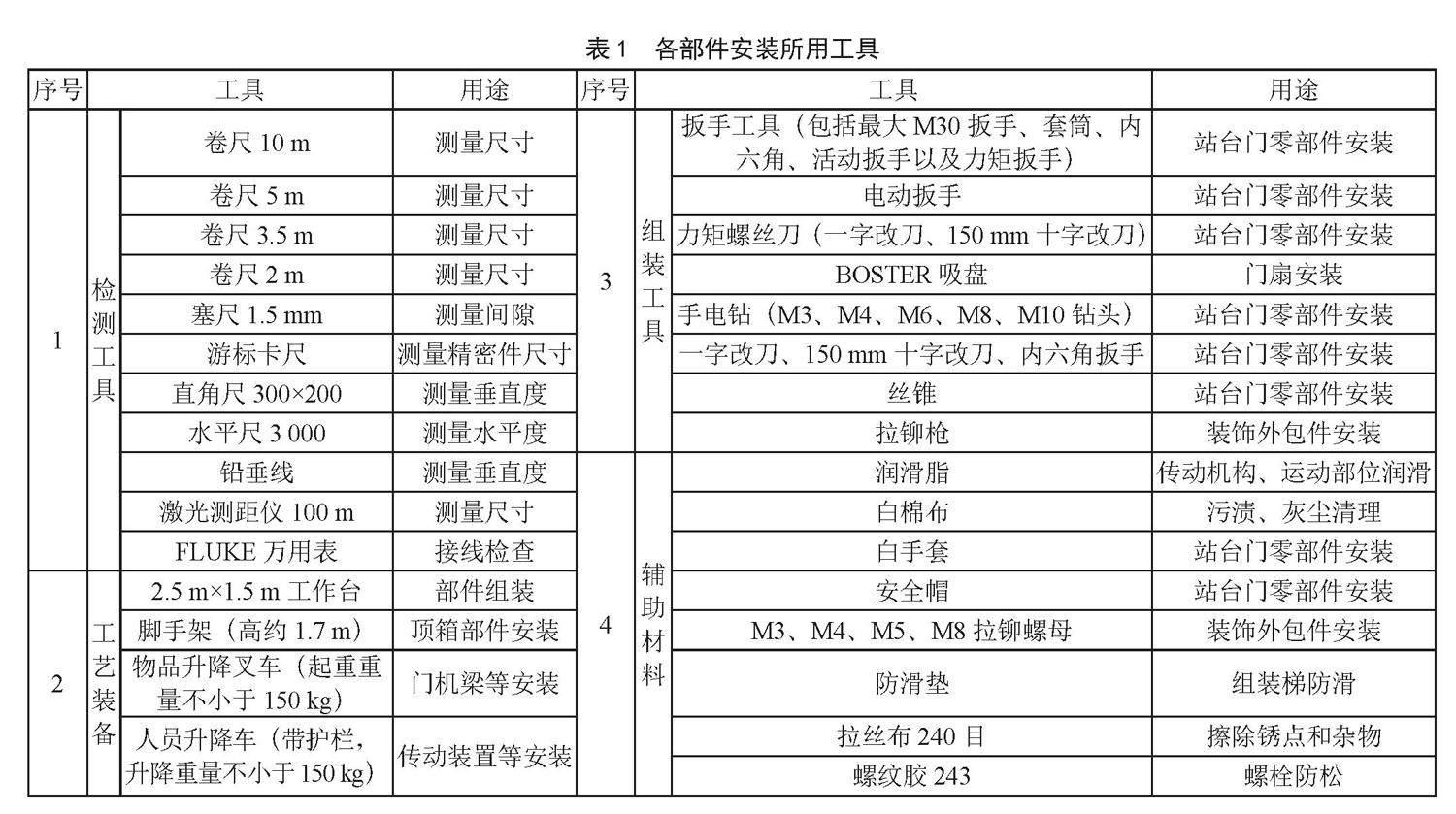
站台门整体结构如图12所示,主要的安装部件有:安装支架、门槛、底座、立柱、门机梁组件、结构组件、滑动门、应急门、固定门、端门、盖板组件等。
各部件安装所用工具如表1所示。
按一侧站台门24个门单元进行计算,算法设定α = 1.0,β = 0.8,γ = 0.5,ρ = 0.05,τ0 = 0.2,Q = 1.0,m = 18,循环次数200次。经过200次迭代后,站台门安装序列为:2→6→4→5→7→8→9→3→1→10→11,安装耗时约为12 h。
传统站台门安装顺序为:3→1→4→2→6→5→7
→8→9→10→11,安装耗时约为28 h。
5 結 论
本文研究提出了城市轨道交通线网站台门智慧施工管理技术,可实现施工作业人员安全行为的识别、站台门BIM模型基础上的虚实结合的施工过程管理。在保证施工安全和质量的基础上,提出了基于人工智能算法的站台门安装规划技术,对安装工艺流程进行优化,实践证明,运用该项技术后,可显著提高安装效率,降低安装成本。
参考文献:
[1] 罗情平,任玲,王义华.城市轨道交通智慧工地信息化集成管理系统研究与应用 [J].都市快轨交通,2022,35(6):45-50.
[2] 谭绍玉,丁伟.信息化技术在城市轨道交通工程建设安全管理中的应用 [J].中国安全生产科学技术,2021,17(S2):117-123.
[3] 田闯,潘洪义,王瑞忠,等.城市轨道交通工程监测预警管理体系探讨与实践 [J].建筑技术开发,2022,49(16):158-160.
[4] 潘惠苹,任艳,徐春.基于核典型相关分析和支持向量机的图像识别技术 [J].南京理工大学学报,2022,46(3):284-290.
[5] 林湧涛,崔宁,赵志俊,等.基于深度学习的图像目标定位识别研究 [J].现代信息科技,2023,7(2):83-86.
[6] 吴真真,唐超,杨晓飞.基于深度学习的视频识别及动态监测技术应用——以轨道交通建设工程为例 [J].测绘通报,2022(9):23-28.
[7] 吕庆,崔维久,于德湖,等.BIM融合信息技术在智慧工地中的应用研究 [J].施工技术:中英文,2021,50(20):5-11.
[8] 王山,何承锦,胡炫宇,等.BIM技术在长株潭城际轨道交通西环线工程总承包项目中的应用 [J].施工技术:中英文,2022,51(8):79-82+110.
[9] 许时颖.城市轨道交通工程WBS和BIM模型分解及编码的研究与应用 [J].施工技术:中英文,2022,51(5):15-18.
[10] 刘香香,孙凤.基于蚁群算法的装配式建筑施工工序多目标优化模型 [J].土木工程与管理学报,2021,38(3):113-118.
作者简介:汪琴(1985—),女,汉族,湖北武汉人,讲师,博士,研究方向:信息化、智能施工。
猜你喜欢
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
电子测试(2017年23期)2017-04-04 05:06:50
科技传播(2016年19期)2016-12-27 15:05:35
电子技术与软件工程(2016年22期)2016-12-26 11:03:07
科技创新与应用(2016年34期)2016-12-23 19:08:15
价值工程(2016年30期)2016-11-24 14:29:54
企业技术开发·下旬刊(2016年9期)2016-11-23 03:13:20