基于VR的城市轨道交通车辆基地检修模拟仿真及应用
2024-06-01 11:14:29谢钦
现代信息科技 2024年4期
收稿日期:2023-07-07
DOI:10.19850/j.cnki.2096-4706.2024.04.026
摘 要:基于车辆基地Bentley BIM数据,采取虚幻4引擎(UE4)进行开发,构建了车辆基地建筑、结构、城轨车辆、管线以及相关设备的VR仿真场景,实现了VR场景中的沉浸式交互、设备操作模拟及设备信息可视化查询等功能。该系统使用头戴式显示设备及zSpace作为交互外设,实现了沉浸式可交互的可视化仿真。结合武汉轨道交通野芷湖车辆基地,开发了沉浸式VR交互展示及检修系统,对VR技术在车辆基地检修模拟仿真及应用有着重要的促进作用与参考意义。
关键词:VR系统;城市轨道交通;车辆检修基地;倾斜摄影;沉浸式交互仿真
中图分类号:TP315;TP391.9;U239.5 文献标识码:A 文章编号:2096-4706(2024)04-0121-07
Maintenance Simulation and Application of Urban Rail Transit Vehicle Base Based on VR
XIE Qin
(China Railway Siyuan Survey and Design Group Co., Ltd., Wuhan 430063, China)
Abstract: Based on Bentley BIM data from the vehicle base, the Unreal Engine 4 (UE4) is used for development, and a VR simulation scene of the vehicle base building, structure, urban rail vehicles, pipelines and related equipment is constructed. The immersive interaction, equipment operation simulation, and equipment information visualization query and other functions in the VR scene are achieved. The system uses head mounted display devices and zSpace as interactive peripherals to achieve immersive and interactive visualization simulation. An immersive VR interactive display and maintenance system has been developed in conjunction with Wuhan Rail Transit Yezhihu vehicle base, which has important promoting effect and reference significance for the simulation and application of VR technology in vehicle base maintenance.
Keywords: VR system; urban rail transit; vehicle maintenance base; oblique photography; immersive and interactive simulation
0 引 言
自20世紀60年代北京开始修建地铁以来,经过近半个世纪的努力,我国城市轨道交通的建设成就斐然[1,2]。城市轨道交通配套系统,指的是包括运行车辆段、培训中心、物资总库及综合维修中心四大基本部分,以及必要的办公设施和生活设施,是当前保障列车安全行驶、提升列车品质及其系统维护与保养的重要基地[3]。
虚拟现实,即VR(Virtual Reality),通过计算机技术为核心,并辅之以计算机图形学技术(Computer
graphics technology)、仿真技术(Emulation technique)、
人机交互技术(Human-Computer Interaction Techniques)等多学科交叉的新兴技术[4,5]。它是伴随人类探索、认知自然的过程中创造性产生并逐渐形成,以此来更好地学习、利用、适应自然的方法和科技[6]。
在轨道交通领域,丛丛等人基于Unity3D游戏开发引擎、虚拟现实技术和数据库资源管理技术开发了城市轨道交通行车作业虚拟仿真实训系统,搭建了集教学、多岗位协同训练、全场景漫游和自动考评为一体的教学实训平台[7]。孔德龙等人建立了基于虚拟现实技术的实验教学综合仿真平台,通过Unity3D实现地铁信号基础设备机械结构、动作原理以及装配顺序的三维建模,并模拟地铁列车运行驾驶模式[8]。倪晨杰等人基于3Ds Max和Unity3D建立三维虚拟列车故障训练平台,实现列车运行状况的故障模拟演练[9]。
可以发现,虚拟现实技术在轨道交通领域已形成了初步的应用和发展,在轨道交通车辆基地仿真模拟和培训中尚未进行系统性的应用。
本文通过虚拟现实平台建立一个高逼真度的检修工艺虚拟仿真环境,利用人机交互及动作捕捉技术来演示车辆设备检测修理过程中的主要步骤及内容,通过将检修的语音、标注、文档、图片等信息集成以实现对于检修内容更加直观全面的展示,使检修人员可以直观地了解和确定检修工序,熟悉检修操作方法,并能对人员操作进行监控评价。
1 车辆基地模拟仿真设备及软件
1.1 虚拟现实关键设备
随着对车辆基地虚拟现实技术的深入研究,多层次、多功能的虚拟现实仿真培训关键设备,为车辆基地的检修、培训等提供硬件基础,对城市轨道交通的安全运营、培训具有极其重要的作用。本系统中,针对场景展示需求,选取携带方便、对场地要求低的头戴式显示设备。针对认知培训,选取开发难度较低、交互效果好的zSpace桌面式VR显示一体机。
头戴式显示器,即头显。通过各种头显,向眼睛发送光学信号。其原理在于采用精密光学透镜及相应光学系统放大微小显示屏上的内容,并将其投射到观察者的视网膜,使其眼中可观察到大屏幕的显示内容,其过程类似与于拿放大镜来放大物体使其呈现出虚拟的放大物像。与之对比,zSpace平台是一款基于3D虚拟呈现和交互的桌面式产品,由包括可追踪位置的3D显示屏、图像工作站、光笔及可佩戴的立体眼镜等组成。该平台通过跟踪监视使用者的头部及手部动作,并及时调整其能看到的3D图像,在此过程中用户可使用光笔对数字化的模型进行操作和维护等过程的模拟、训练及学习。
1.2 引擎开发平台
UE4引擎具有的强大图像能力以及真实的交互效果,在开发PC端的具备较大的优势。本虚拟现实系统采用图像渲染能力较为突出的UE4引擎。在虚拟显示系统开发的过程中,UE4引擎作为渲染及功能开发工具主要涉及蓝图、材质、粒子系统、UMG等相关技术。
1.2.1 蓝图与C++
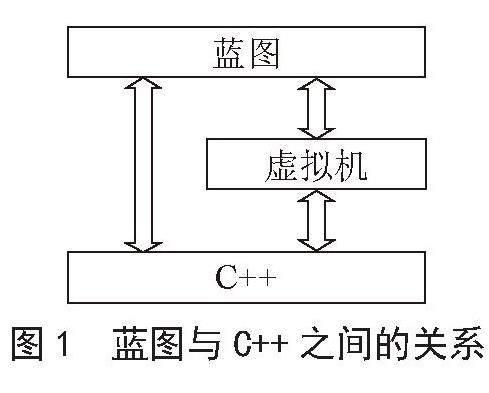
UE4引擎平台中的蓝图(Blueprint),其本质是一种可视化的脚本系统,通过连线把蓝图中的变量、节点、函数及事件等按一定的逻辑关系集合在一起即可实现预设的功能。当前蓝图类型主要有两种:Class Blueprints(类蓝图)和Level Blueprints(关卡蓝图)。此外,还可采用C++来实现系统功能,其中蓝图与C++的关系如图1所示。蓝图的优势在于快速迭代,该功能对于快速原型设计及简单事件驱动设计的开发较为方便,相较之下,C++优势在于玩法复杂且耗费CPU性能较多的算法。
图1 蓝图与C++之间的关系
1.2.2 材质系统
UE4引擎中的材质均基于物理渲染(Physically Based Rendering, PBR),通过将生动的光照/阴影模型与相应的材质参数值相结合来准确地展示当前真实世界的材料。材质系统主要有五部分组成,即材质表达式、材质属性、材质输入、网格及纹理贴图,如图2所示。
图2 基于物理渲染的材质系统
1.2.3 粒子系统
UE4引擎粒子系统采用的是模块化设计,其中单一模块展示粒子行为的一个特定方面,并为其提供相关的属性参数,如生成的颜色、位置、移动及缩放行为等。在粒子系统中,通过添加或者删除相应的模块可更细致全面定义粒子的整体行为。当前UE4引擎共支持5种粒子生成器,其分别对应不同的特效,比如火花状粒子常用来表示火焰效果,精灵粒子则用来表示雨雪效果,波状粒子可用于展示闪电效果,尾迹粒子则可用来呈现流星划过效果。
1.2.4 UMG
UMG,即核心部件为控件的虚幻动态图形UI设计器,用于创作想要呈现给用户的UI元素,通过一系列提前制作的功能来定义界面(如进度条、按钮、滑块及复选框等功能)。通過在特定的控件蓝图中调整其核心控件,并采用图形选项卡和设计器选项卡来进行构建。其中图形选项卡用于调用控件时展示的功能,设计器选项卡则用于实现界面的整体视觉布局。
2 车辆基地虚拟场景构建
2.1 三维模型构建及优化技术
系统的三维模型基于表面模型构建,即采用面片拼接的方法来表示模型,具有完全不含有模型内部的信息的特点,如图3所示。同时,相较于体素模型、点云模型,表面模型的数据量最小,数据结构相对简单,内存占用小,在后期渲染时较为方便。同时,在保证模型有较高仿真度的前提下,采用三角形网格简化算法,基于顶点删除法、三角形删除法、边折叠法、顶点聚类等以实现对所建模型的优化。
(a)体素模型 (b)点云模型 (c)表面模型
图3 三维几何模型表示方式的比较
2.2 基于BIM软件的快速化模型构建
通过调用BIM模型库中的各类模型至VR系统中,可实现车辆基地全专业的快速化模型构建,有效解决车辆基地建模数量大、周期长的问题。
2.2.1 基于BIM软件的VR模型库系统
BIM模型库包含了众多专业的模型,支持模型的生成、存储、查询、调用和维护。通过VR系统可以直接调用模型,减小建模工作量,提高建模效率。通过对国内各城市轨道交通车辆基地进行考察,收集相关资料,参照《建筑工程设计信息模型分类和编码标准》等标准对各个设备进行编码分类,以便后续调用相应模型,如表1所示。
此外,系统还开发六个标准模型库,分别为建筑结构模型库、城轨车辆模型库、检修库房模型库、管线综合模型库、场景设计模型库以及检修设备模型库,如图4所示。整个模型库中的模型总数多达上万种,足以满足车辆基地的设计需求。此外,模型库支持模型的动态变更和扩充,方便工作人员对模型进行修改和完善。
2.2.2 基于BIM软件的VR模型构建
在模型库建成的基础上,将模型加入至自定义用户对象,通过对模型的格式转换及复合单元封装将模型添加至模型库中,即可用命令方式直接调用模型。为方便使用,通过二次开发对操作工具栏和调用窗口进行定制,并且将调用命令全部进行图形化,如图所示5所示。同时,选取模型后可直接放置,并可显示模型编号等信息。
将BIM软件的数据模型进行处理转成VR数据引擎识别的内容,通过调用BIM模型库中的模型即可快速搭建所需模型。搭建出的模型不仅数据完备、精确度高,并且有强大的直观性和体验性。BIM系统和VR应用的集成关系如图6所示。
(a)模型库造作工具栏 (b)模型调用窗口
(c)模型库图形化窗口
图5 模型调用示意图
图6 BIM软件与VR模型库系统
2.3 基于倾斜摄影的快速化场景创建
2.3.1 车辆基地倾斜摄影概述
基于倾斜摄影技术快速建模,可以生成与车辆基地现场环境中的相匹配的三维场景模型,相比传统建模显著地缩短了建模周期,同时增强了车辆基地周边大环境的三维模型还原能力。通过利用无人机对车辆基地场景进行遍历扫描,获得带有地形信息的车辆基地倾斜摄影图像,对多视角影像进行融合优化处理,最后生成具有精细结构的三维模型。同时,采用倾斜摄影技术对车辆基地大场景扫描,可弥补单独通过航空或者地面方式获取数据进行建模造成的模型细节缺失问题。
图7为利用无人机倾斜摄影技术对武汉市某车辆基地进行三维实景建模的步骤图,倾斜摄影实景建模可以进行车辆基地数字化场景建模,在有效还原车辆基地场景地面地貌的同时,大幅缩短建模周期,极大提高建模效率,并且能够实时更新现状,对工程全生命周期管理提供直观概览。
图7 基于倾斜技术的三维实景建模的步骤图
2.3.2 倾斜摄影关键技术研究
2.3.2.1 基于倾斜摄影的快速化场景创建
基于倾斜摄影与3Ds Max插件开发技术的快速建模技术路线如图8所示。首先将获取的影像进行空中三角量测并获得高精度的外方位元素;其次3Ds Max插件根据提供的外方位元素和共线方程实现基于倾斜影像的建筑物多片立体量测并将测得的数据输入3Ds Max平台生成三维模型;然后根据三维信息提取模型每个而在影像上相应的最佳纹理信息,并实现纹理自动映射;最后输出三维模型。
2.3.2.2 倾斜摄影优化
对于部分区域的模型存在畸变,可对基于倾斜摄影测量技术所生成的初始三维模型进行优化,具体包括:
1)几何修复优化,通过对修补模型中的破洞,包括凸包抹平并还原、删除飞面等碎部。
2)细部整饰优化,对重要的标志物采取三维模型整饰或替换。
3)纹理修补优化,采用替换和修补等操作对于不均匀和清晰度不足的纹理优化。其中无人机倾斜摄影测量模型的二次处理技术路线如图9所示。
2.4 虚拟现实模型轻量化与精细化结合技术
鉴于当前列车及其关键部件模型可能存在空洞,模型数据量大以及相关计算量大等问题,车辆基地虚拟现实模型基于不同细节层次技术(LOD技术),采用“二次误差度量”算法(Quadric Error Metrics, QEM),也就是基于“二次误差度量”的简化算法并以边折叠为基础,将点到三角网格平面距离的平方引为误差度量,且系统采取双向链表来记录该过程中的简化序列,即可获取实时的相应连续细节层次模型。其方案整体流程为模型读取——模型修复——模型简化,该方案在模型简化之前加入模型修复程序作为简化的前置程序。表2为优化前后数据对比。
图9 采用无人机倾斜摄影测量模型的二次处理步骤
表2 转向架模型优化前后数据对比
简化率/ % 三角形边数 顶点数 顶点保留
百分比/ % 模型大小/KB
未简化 74 118 36 900 0 2 807
20 60 088 29 889 81.00 2 262
420 43 810 21 790 59.05 1 630
50 35 230 17 650 49.23 1 304
60 28 496 14 297 39.52 1 043
3 车辆基地沉浸式VR系统开发
3.1 沉浸式VR展示系统
3.1.1 仿真场景构建
1)构建三维模型。车辆基地VR仿真模型的构建主要包括:首先在Bentley软件中创建三维模型并将其导入到3Ds Max;其次采用3Ds Max软件优化BIM模型,主要包括减面及重构等;再次为保证后续材质系统及光照系统的正常运行,展开模型UVW并创建2套UVW;最后将上述模型导入UE4,完成车辆基地三维模型的构建。
2)基于物理渲染。基于物理渲染即基于物体的基本属性和光照信息来进行着色计算,实现物体对环境光线的准确实时反应。其中关键点——物体的光照模型采用微表面的双向反射分布函数所得,光照模型可模拟环境光线在其表面的漫反射和高光反射,并遵守能量守恒定律即Helmholtz倒易率,从而保证了车辆基地VR仿真场景的沉浸感与真实度。
3)碰撞检测。当前碰撞检测的方法很多,本系统采用的碰撞检测是基于空间碰撞检测算法构建[10,11],其核心技术为层次包围盒技术以及射线检测技术[12]。在VR系统中,碰撞检测技术可及时有效地克服交互过程中穿入设备及建筑物等模型的问题,从而保证VR仿真模型的真实性、合理性及自然性等。
3.1.2 基于VR的BIM數据查询
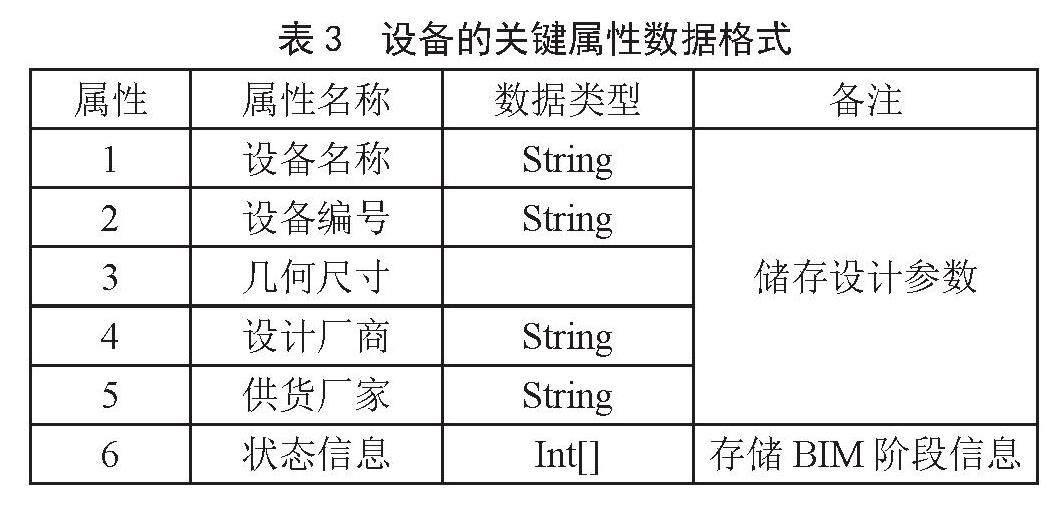
1)BIM信息数据结构的构造。基于Bentley BIM平台,通过将工程各个生命周期阶段中对应的关键信息提取至Excel,中,在此基础上于一定的数据结构构造系统设备的关键信息,其中信息的存储格式如表3所示。
表3 设备的关键属性数据格式
属性 属性名称 数据类型 备注
1 设备名称 String 储存设计参数
2 设备编号 String
3 几何尺寸
4 设计厂商 String
5 供货厂家 String
6 状态信息 Int[] 存储BIM阶段信息
2)数据读取与显示。基于上述BIM平台提取的Excel数据,即可得到对应的逗号分隔符数据(.csv数据)。在UE4引擎系统中,为了在系统中存储相应的BIM信息,可结合表中的数据结构构造相应的结构体,最后通过DataTable将逗号分隔符数据加载至系统中。
3.2 沉浸式VR交互系统
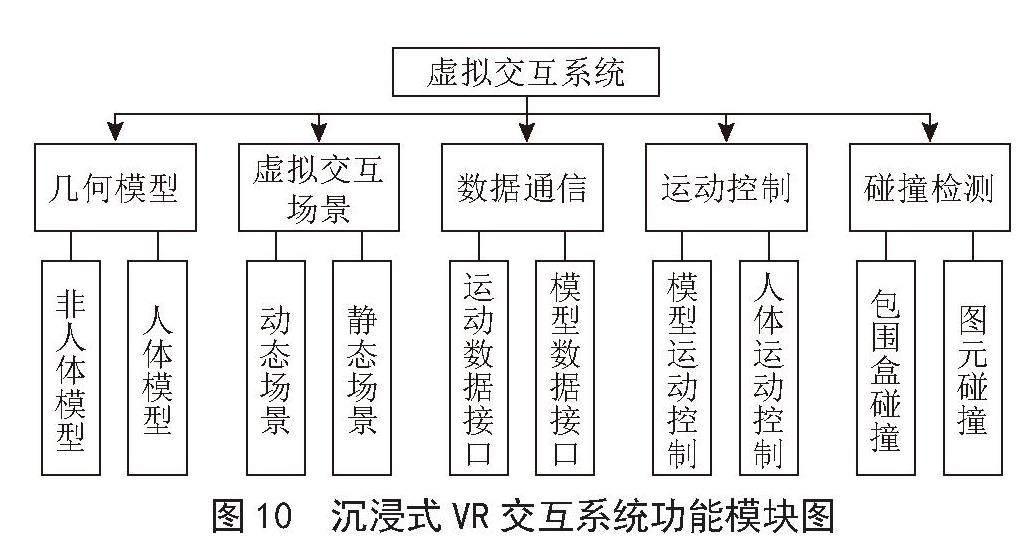
本VR系统的总体框架可分为真实场景和虚拟场景两部分,其中虚拟场景主要由几何模型构建、运动控制、虚拟场景显示及碰撞检测技术等模块组成。系统的功能模块如图10所示,在真实场景和虚拟场景间存在进行数据传输的通信模块和数据采集模块。
图10 沉浸式VR交互系统功能模块图
在虚实交互系统中,通过实时采集贴有标记点的人物的关键关节数据,并将此数据与虚拟人物的骨骼进行匹配,即可对虚拟人物模型的运动实现控制。同时,为了让使用者有更好的体验感,还需对人与纯虚模型进行实时检测以检查是否发生碰撞,当系统检测到碰撞时,虚拟的人物模型可根据人体数据进行相应的响应。其中虚拟交互系统的整体工作流程如图11所示。
图11 沉浸式VR交互系统流程图
4 应用实例
利用前述方法,以武汉轨道交通7号线一期工程野芷湖车辆基地为基础,建立了沉浸式VR展示系统,通过系统可以直接查看车辆基地室内及室外场景,对各专业的设计内容进行直观查看,如图12所示。
图12 室内外场景查看
检修工艺的仿真是检修基地全方案设计中非常重要的一个环节。本系统的检修工艺模拟仿真技术可根据预先设定的检修工艺路线、布局规划、工艺节拍等条件,全方位仿真工艺检修过程。系统对检修效率进行数字化评估的同时,通过检修过程的分毫毕现,展示每一个检修工位的生产情况,能够实现整个检修线的漫游、浏览。当出现检修工艺不合理时,视图中立即高亮显示。在城市轨道交通列车架车检修工艺仿真中,用户从库房端门进入车辆基地检修库,模拟工人实际行走路线如图12所示。地上的连续箭头引导体验用户到达操作工位,库内牵引车、叉车等设备仅作机械模拟,用以辅助理解工艺布局。
5 结 论
本文描述了一种基于VR虚拟现实技术的车辆基地可视化交互仿真系统,该系统采用Bentley BIM和UE4引擎及PBR、碰撞检测技术、沉浸式交互、三维场景建模等关键技术,实现了VR仿真模拟场景中的沉浸式交互、可视化设计、检修模拟、操作培训及设备信息可视化查询等功能,并通过工程实例进行了验证。其研究成果如下:
1)研究了基于BIM软件的快速化模型构建技术,建立了基于BIM软件的模型库,通过直接调用和参数化生成标准模型;利用无人机倾斜摄影实现车辆基地场景模型快速构建。通过“三维建模+倾斜摄影”的方式建立车辆基地虚拟场景模型,并通过连续细节层次技术实现模型的修复和优化;最后通过对数字化工业模型进行网格优化和轻量化转换,成功得到车辆基地可视化模型。
2)通过综合比选,结合轨道交通车辆基地特点,合理确定了车辆基地虚拟仿真模拟仿真硬件设备—zSpace桌面式一体化显示平台与头戴式虚拟显示设备,以及系统开发平台—UE4引擎,为车辆基地沉浸式VR系统开发提供软、硬件基础。
与此同时,基于VR技术在的车辆基地检修模拟应用中尚处于初步阶段,对未来VR仿真的进一步应用作两个展望:
1)进一步扩大虚拟现实技术的应用面,将虚拟现实技术应用于车辆检修过程以及配合施工方面。
2)随着虚拟现实技术的快速发展,将MR(混合现实)/AR(增强现实)等技术推广并应用于城市轨道交通车辆基地运营和检修中。
参考文献:
[1] 孙久文,张翱,周正祥.城市轨道交通促进城市化进程研究 [J].中国软科学,2020(6):96-111.
[2] 王福文,冯爱军.2022年我国城市轨道交通数据统计与发展分析 [J].隧道建设:中英文,2023,43(3):521-528.
[3] 石鹏鹏,王亚丽,金健,等.城市轨道交通全自动运行车辆基地设计 [J].城市轨道交通研究,2023,26(6):206-209.
[4] 詹平,梅粮飞,詹天杨,等.基于VR的抽水蓄能电站厂房可视化交互仿真及应用[J].武汉大学学报:工学版,2019,52(5):391-398.
[5] 郝孜奇,张文胜.基于Unity3D的铁路实训虚拟仿真系统开发 [J].计算机仿真,2020,37(6):99-103+241.
[6] 伍朝辉,郭瑜,王辉,等.虚拟现实交通运输应用研究综述 [J].系统仿真学报,2016,28(10):2289-2297+2303.
[7] 丛丛,李俊辉,秦凯.城市轨道交通行车作业虚拟仿真实训系统的设计与应用 [J].城市轨道交通研究,2020,23(8):44-49.
[8] 孔德龙,胡万欣.基于Unity3D的地铁信号设备综合仿真平台研究 [J].实验技术与管理,2019,36(9):106-110.
[9] 倪晨杰,郎诚廉.三维虚拟列车的建模及在故障训练中的应用与研究 [J].铁路计算机应用,2016,25(7):4-7.
[10] 闫俊伢,裴娅男,姚宏,等.虚拟现实中基于果蝇优化算法的碰撞检测 [J].南京理工大学学报,2023,47(1):74-80.
[11] 夏襄宸,肖志怀,刘少华,等.抽蓄机组数字化检修管理研究与应用 [J].中国农村水利水電,2022(3):232-238.
[12] 李星,傅妍芳,王亮,等.基于射线检测的动态碰撞优化算法 [J].系统仿真学报,2019,31(11):2393-2401.
作者简介:谢钦(1993—),男,汉族,四川南充人,工程师,硕士研究生,主要研究方向:轨道交通机车车辆研究。
猜你喜欢
城市地理(2017年8期)2017-11-02 17:06:37
科技资讯(2017年24期)2017-09-15 07:21:47
中国新技术新产品(2017年14期)2017-07-07 16:23:04
中国科技博览(2017年4期)2017-05-19 11:12:49
科技创新导报(2016年26期)2017-03-13 19:54:36
中国科技纵横(2016年21期)2017-02-13 17:45:16
科技传播(2016年19期)2016-12-27 15:05:35
电子技术与软件工程(2016年22期)2016-12-26 11:03:07
科技创新与应用(2016年34期)2016-12-23 19:08:15
价值工程(2016年30期)2016-11-24 14:29:54