
基于RFID与GPS的拖拉机机库信息管理系统的设计与开发
2024-05-30 16:43:52张九通唐维东刘鸿瑞杨思存廖明亮蒋猛
中国农机化学报 2024年5期
张九通 唐维东 刘鸿瑞 杨思存 廖明亮 蒋猛

摘要:针对一些大型拖拉机机库的管理过程中,产生的数据量庞大,传统依靠人工手动录入的管理方式效率低下、成本高、可靠性低等问题,结合互联网、传感器、智能定位等技术设计并开发一套拖拉机机库信息管理系统。该系统分为移动端和机库端的开发,移动端使用GPS进行拖拉机室外定位,结合拖拉机作业幅宽,计算得到拖拉机的作业面积等信息,开发移动端人机交互界面。机库端先对射频识别(RFID)的硬件电路进行设计,再使用Landmarc定位算法进行拖拉机室内定位,最后综合机库内的环境参数和移动端上传的作业信息等,开发拖拉机在线管理可视化平台。为验证系统的可行性,进行Landmarc算法的定位仿真、作业面积计算准确性验证、数据上传丢包测试。试验结果表明:拖拉机室内定位的平均误差为1.06 m,可以满足判断拖拉机车位的要求;作業面积计算的平均误差为4.17%,可以满足实际作业时的需求;数据存储成功率为97.70%,能够实现各项数据的存储。
关键词:管理系统;射频识别;Landmarc定位算法;GPS;拖拉机
中图分类号:S23
文献标识码:A
文章编号:2095-5553 (2024) 05-0154-08
收稿日期:2023年7月6日 修回日期:2023年9月27日*基金项目:贵州省科技厅农业支撑项目(黔科合支撑[2020]1Y127号);重庆市渝北区科技计划项目(2022(农社)09)
第一作者:张九通,男,1999年生,重庆人,硕士研究生;研究方向为农业物联网及智能农业装备。E-mail: 2544258668@qq.com
通讯作者:蒋猛,男,1964年生,四川岳池人,硕士,副教授;研究方向为农业物联网。E-mail: driver1964@sina.com
Design and development of tractor hangar information management system
based on RFID and GPS
Zhang Jiutong1, Tang Weidong1, Liu Hongrui1, Yang Sicun1, Liao Mingliang2, Jiang Meng1
(1. College of Engineering and Technology, Southwest University, Chongqing, 400715, China;
2. Zunyi City Bozhou District Secondary Vocational School, Zunyi, 563102, China)
Abstract:
In view of the huge amount of data generated in the management process of some large tractor hangars, the traditional management method of manual input is inefficient, high cost and low reliability, and a set of tractor hangar information management system is designed and developed in combination with the Internet, sensors, intelligent positioning and other technologies. The system is mainly divided into mobile terminal and hangar end development, the mobile terminal uses GPS for tractor outdoor positioning, calculates the tractor working area and other information combined with the tractor working width, and develops the mobile terminal human-computer interaction interface. At the hangar end, the hardware circuit of radio frequency identification (RFID) is designed first, and then the indoor positioning of the tractor is carried out using the Landmarc positioning algorithm, and finally, the tractor online management visualization platform is developed by integrating the environmental parameters in the hangar and the operation information uploaded by the mobile terminal. In order to verify the feasibility of this system, the positioning simulation of Landmarc algorithm, the verification of the accuracy of the operation area calculation, and the packet loss test of data upload are carried out, and the test results show that the average error of the indoor positioning of the tractor is 1.06m, which can meet the requirements of judging the tractor parking space, and the average error of the operation area calculation is 4.17%, which can meet the needs of actual operation. The success rate of data storage is 97.70%, which can realize the storage of various data.
Keywords:
management system; radio frequency identification; landmarc positioning algorithm; GPS; tractor
0 引言
近年来,我国农业机械化水平不断提升[1],农业机械数量增长较快。随着中国科学技术的不断发展,农业机械开始向智能化、信息化转型。对于一些大型的农业机械机库,其中拖拉机数量繁多,涉及的农机信息和作业信息的数据量庞大。目前大多数机库仍采用传统的人工手动录入方式进行管理,在数据量太庞大的机库,这种管理方式耗费人力较多,效率低下。在跨区作业越来越普遍的今天,拖拉機的管理愈发复杂,引发了政府作业监管困难、农忙时间拖拉机资源分配难以协调、拖拉机实际运行效率难以度量等问题[2]。因此,在物联网技术不断发展的背景下,借助互联网、传感器、智能定位和大数据等技术,实现拖拉机机库的智能化、信息化转型,建立拖拉机机库信息管理系统,是拖拉机管理的必然趋势[3-5]。
国外目前有一些关于农业管理平台的研究,但是平台技术完整性有待提高。比如美国的FarmSightTM农业管理平台、Trimble Ag Software农场管理平台等[1]。这类管理平台主要是用于采集拖拉机进行田间作业时的各项数据,对长期采集的数据进行分析以指导生产[6]。但是对于日常作业的管理效果不明显,且平台通用性不强,在中国现阶段的农业生产中无法起到较好的指导作用。
国内目前正处在传统农机向现代农机转型的关键时期[7]。在“863”计划、科学技术部“十三五”国家重点研发计划等重大专项和地方政府的支持下,农业机械的信息化管理在近年来取得了较大的进步。朱登胜等[2]提出了一种农机远程智能管理平台,以农田为核心,将农业生产中的各种数据联系成一个整体,实现农业资源及农田资源的统一分析与管理。张良等[8]基于北斗导航技术,设计了农机作业面积管理系统,实现了依靠该系统对作业面积进行计算和管理。张俊艺等[9]基于Android系统开发了农机调度管理平台,建立了农机主、农民、管理员三方交互的农机调度管理平台,部分解决了因为信息不畅通引起的农机供需缺口大的问题。
随着导航技术和传感器技术的发展,农业机械正朝着智能化、信息化的方向发展,智能化的拖拉机机库在拖拉机进行日常作业和管理的过程中,会产生大量的数据[10]。为实现拖拉机作业生产全过程的信息化管理,本研究使用RFID技术、GPS技术、物联网技术等,针对拖拉机在机库端和移动端的感知数据,研发了一种较为通用的拖拉机机库信息管理系统。在移动端实现驾驶员与拖拉机的人机交互,实现每一台拖拉机作业的精准管理;在机库端实现作业信息、位置信息、环境参数等信息的可视化管理,以及生产数据的溯源统计。提高管理效率的同时,大量的生产数据能够为农户生产提供指导,为政府的决策提供数据支撑。
1 系统功能架构设计
基于RFID与GPS的拖拉机机库信息管理系统由机库端和移动端组成。机库端由RFID读写器进行位置信息的采集,移动端由GPS模块进行位置信息采集与作业信息计算。通过DTU无线透传模块实现数据的上传。分别在可视化大屏和人机交互界面实现信息可视化。
系统总体架构如图1所示,分为感知层、网络层和应用层。其中感知层在机库端由RFID读写器和环境监测传感器进行数据采集,在移动端由GPS进行数据采集,采集到的数据分别由串口发送到对应单片机进行处理;网络层主要由DTU读取单片机的数据并转发到网络服务器,存入数据库;应用层主要是可视化大屏和人机交互界面,通过服务器获取前端资源,实现与后台的数据交互。
2 硬件设计与实现
2.1 嵌入式模块设计
嵌入式模块是本系统采集数据的硬件核心,分别需要和RFID读写器、GPS、DTU进行通信,在主控芯片内部需要进行定位算法的运算。考虑到该模块需要与多台设备进行通讯,而且内部需要运算算法,首先考虑选用串口丰富而且运算速度块的主控芯片,其次再综合考虑价格、性能等,最终选择STM32F407GT6作为主控芯片。该芯片性能稳定、有6个串口、在168 MHz频率下,能够提供210 DMIPS性能。以STM32为主控芯片的控制模块结构如图2所示。
2.2 机库端定位模块设计
机库端定位模块由STM32、RFID读写器、DTU无线模块组成。该模块作用于机库,需要采集机库中标签的信号强度,计算待定位标签对应拖拉机的坐标。考虑到本系统RFID模块使用RSSI法进行室内定位,读写器接收的RSSI值应当具有可靠性,再基于机库空间以及机库内拖拉机数量方面的考量,兼顾高性能、低成本、低功耗的要求,最终选择Impinj的IE701读写器。
IE701外部引出了5VDC、GND、GPIO1、GPIO2、UART_RXD、UART_RXD、EN、GPIO3等15个管脚。主控芯片与读写器进行通信时,需要连接5VDC、GND为读写器供电,连接UART_RXD、UART_RXD进行串口通信,串口通信在TTL电平3.3 V下进行,需额外连接一个3.3 V引脚。主控芯片与读写器连接的电路原理图如图3所示。
2.3 移动端定位模块设计
该模块由STM32主控芯片、定位装置、无线模块、人机交互界面组成。移动端定位模块作用于拖拉机,需采集拖拉机进行田间作业时的位置信息[11],并通过无线模块上传到上位机、通过串口传到人机交互界面。
选用USR-G776-GNSS(DTU)无线模块进行拖拉机移动端定位。该模块集成GPS+北斗定位,具有配套的二次开发云平台,方便进行二次开发。同时该模块具有无线透传的功能,可以将移动端定位模块采集的数据上传至云平台。将其装备在拖拉机上,这一个模块就能够实现拖拉机的定位以及数据的上传。DTU将采集的经纬度坐标上传到有人云服务器,在云平台处理后通过DTU传到STM32控制芯片,再由STM32的串口2传输到人机交互界面。人机交互界面选用TJC8048X550串口屏。定位模块和人机交互界面的电路接口图如图4所示。
3 软件设计
3.1 农机装备定位
拖拉机的定位是本文的核心部分,主要分为RFID室内定位和GPS室外定位两部分。当拖拉机在机库端时,采用RFID室内定位技术进行拖拉机室内定位,以此确定机库中的拖拉机数量,以及每台拖拉机所在的车位。当拖拉机离开机库,进行移动端作业时,采用GPS实时定位,得到拖拉机的运动轨迹,并以此计算拖拉机的作业时间和作业面积。
3.1.1 基于RSSI的LANDMARC室内定位算法
考虑到机库室内的环境复杂,在进行室内射频识别时有很多干扰因素[12],影响定位精度,因此引入对数路径损耗模型(1),图5是参考距离为1 m,损耗指数为4、白噪声的信噪比水平为28 dB时的仿真结果。
PD=PD0-10μlg(D/D0)+x (1)
式中:
PD——
距离信号发射点为D时的信号强度值;
PD0——
距离为D0时的参考信号强度值;
μ——损耗指数;
D——读写器与待定位标签的距离;
D0——参考距离;
x——正态分布随机变量。
LANDMARC算法的原理是通过已布置好的参考标签协助定位,根据参考标签与待测标签之间RSSI值的差异赋予不同的权值,进而使用加权估算得出待测标签的坐标[13-15]。
其定位算法的第一步就是由读写器获取参考标签和待测标签的信号强度矩阵。假设定位区域有读写器m台,待定位标签s个,布置参考标签n个,测得的参考标签RSSI矩阵A和待测标签RSSI矩阵B,如式(2)所示。
3.1.2 仿真试验
为了验证LANDMARC定位算法在农业机械机库中定位的准确性,使用MATLAB软件进行室内定位仿真试验。在图6所示长×宽为40 m×36 m的模拟机库内进行仿真试验,其中LANDMARC定位算法的k值设置为4,路径损耗指数N设置为2。
在该模拟机库的区域布置读写器4个(分别在四个角落)、参考标签54个(包括36个车位标签和18个道路标签)。随机选择待定位标签8个。
使用MATLAB在模拟机库中进行基于标签信号强度的LANDMARC算法的拖拉机室内定位仿真试验,仿真结果如图7所示。
由式(7)计算得到8个待定位标签的定位误差,结果如图8所示。
由图8可知,最大误差为1.76 m,最小误差为0.52 m,平均误差约为1.06 m。拖拉机车位的大小为2 m×4 m,在机库中只需要知道拖拉机所在的车位即可,因此本文中LANMARC定位算法的精度,能够满足机库内拖拉机的定位要求。
3.1.3 基于GPS技术的农机装备室外定位
拖拉机在移动端作业时使用USR-G776-GNSS模块进行室外定位与数据透传,将该模块安装在拖拉机车头的内部,由拖拉机的蓄电池供电。该GPS定位模块内置无线透传模块,可直接向云平台传输经纬度和高度等信息,经平台内部运算过后转化成速度、里程、时间等信息,展示在云平台上。
调用云平台的API接口获取行驶里程,再配合拖拉机的作业幅宽,根据式(8)可计算出拖拉机的作业面积
S=al
(8)
式中:
l——作业幅宽,m;
a——行驶里程,m。
累加一天内拖拉机的行驶里程和行驶时间,就能得到拖拉机一天的作业时间和作业里程。拖拉机作业面积计算流程如图9所示。
每台拖拉机上安装一台人机交互设备,该设备由人机交互界面、STM32控制芯片、USR-G776-GNSS组成。将经纬度坐标、作业里程、作业面积、作业时间等信息传输至各个拖拉机对应的人机交互设备中,精准实现每一台拖拉机的作业情况统计。
将各个拖拉机的作业信息进行汇总统计后,上传至后台数据可视化平台中,实现机库中拖拉机作业情况的总体统计,并在卫星地图中显示拖拉机的实时位置[19]。
3.2 管理系统构建
3.2.1 数据库设计
拖拉机机库管理系统的建立离不开数据存储,本系统的数据库采用开源的MySQL数据库进行设计,借助Navicat Premium 16对数据库进行管理。本系统中主要实体之间的关系如图10所示。
RIFD标签和拖拉机一一对应,通过RFID读写器读取RFID标签,就能得到标签对应的拖拉机信息,因此设计拖拉机表和RFID标签表。在机库内,通过RFID室内定位技术,得到机库中各个拖拉机的信息,因此设计机库表。在田间,通过GPS定位,可以得到拖拉机室外作业的总体情况,因此设计作业情况表。整个数据库的设计遵循数据库三范式准则[20],数据库主要表信息如表1所示。该数据库的建立为农机机库信息管理系统的构建奠定了数据基础。
3.2.2 人机交互界面设计
人机交互界面作用于拖拉机移动端作业时。在每一台拖拉机上单独安装一块串口屏,实现拖拉机详细作业信息的数据可视化。拖拉机详细作业信息的人机交互界面包括开关控制、基本信息、本次作业信息、累积作业信息、位置信息等模块。
当拖拉机启动时,人机交互界面、GPS模块等也立即启动,串口屏上显示拖拉机的基本信息、累积作业信息、位置信息等。点击“开始作业”按钮后开始累加本次作业的时间和面积,结束作业时点击“结束作业”按钮,将本次作业的时间和面积分别累加到“累积作业信息”中。
3.2.3 后台数据可视化设计
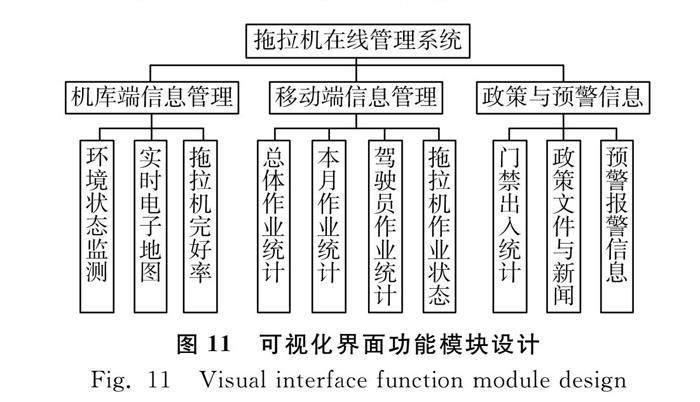
机库中拖拉机数量众多,数据量较大,为了更直观地展示机库中拖拉机的作业情况和位置信息等,本研究开发了一个可视化大屏,在机库端进行展示。本设计采用有人IOT进行可视化大屏的开发,借助该平台可以使用低代碼拖拉拽的方式编辑大屏,实现快速开发。通过调用API接口的实时交互数据,保证其中数据的实时性与真实性。其功能结构如图11所示。该可视化平台主要包含三个模块,分别是机库端信息管理、移动端信息管理、政策与预警信息。
可视化大屏如图12所示,左边三个板块是机库端信息管理模块,包括机库环境状态、实时电子地图、拖拉机完好率;右边四个板块以及中间的卫星地图是移动端信息管理模块,包括总体作业情况、本月作业统计、驾驶员作业统计、拖拉机作业状态、GPS实时定位;下面三个板块是政策与预警信息,包括机库门禁出入统计、政策文件与新闻、预警报警信息。
4 测试与分析
4.1 系统通信稳定性测试
对后台记录的数据包进行丢包测试,以RFID读写器、GPS、环境监测传感器为测试对象。设定RFID读写器和GPS每20 s采集一次数据,环境监测传感器每1 min采集一次数据,选取2023年6月11日14时到2023年6月14日14时,共72 h采集的数据作为样本。对照数据库中收到的数据量,丢包测试结果如表2所示。由表2可知,平均丢包率为2.30%,数据存储成功率为97.70%。从本系统的一般需求以及数据完整性需求考虑,该数据存储成功率可满足实际需求。
4.2 作业面积计算准确性测试
选择4块标准农田进行培土作业,测试根据式(8)得到的作业面积准确性。4块农田的面积分别为576 m2、970 m2、1443 m2、1640 m2,驾驶搭载了GPS移动终端的拖拉机进行测试,拖拉机装载的农机具为雄进农机WJSP-6培土犁,该机具的作业幅宽为2.1 m,在移动终端上选择对应的作业方式和作业机具后开始测试。
误差是由地块形状、地块大小、重复作业等多方面因素造成的,结果如表3所示。平均误差为4.17%,该误差对驾驶员作业面积的记录影响较小,可以满足实际作业时的需求。
5 结论
在农业机械开始智能化、信息化转型的背景下,针对拖拉机机库中的大量数据,设计并开发拖拉机机库信息管理系统。
1) 本文設计一套拖拉机机库信息管理系统,主要分为机库端和移动端的设计。在机库端使用RFID进行拖拉机室内定位,获取拖拉机的位置信息,综合环境参数、作业信息等,借助有人IOT平台开发了前端可视化界面,实现数据可视化与数据溯源,指导农民生产,为政府决策提供数据支撑。在移动端使用GPS进行室外定位,并计算作业量,每台拖拉机上安装人机交互界面,自动记录驾驶员的作业信息,实现每一台拖拉机作业的精准管理。
2) 先对RFID和GPS模块进行硬件电路设计,然后对RFID室内定位算法进行设计、用GPS室外定位路径来计算作业面积。使用Landmarc定位算法实现拖拉机室内定位,完成标签布局,并使用MATLAB进行拖拉机定位仿真试验,试验结果表明,该算法在该机库的平均定位误差为1.06 m,能够满足判断拖拉机车位的要求。用GPS定位获得的拖拉机行驶里程乘以其作业幅宽,得到拖拉机作业面积。
3) 进行系统通信稳定性测试和作业面积计算准确性测试。连续72 h的丢包测试数据表明,数据存储成功率为97.70%,可以满足实际需求。选择4块标准农田开展实地作业,进行作业面积计算测试,作业面积计算误差的平均值为4.17%,可以满足实际作业时的需求。
参 考 文 献
[1] 谢斌, 武仲斌, 毛恩荣. 农业拖拉机关键技术发展现状与展望[J]. 农业机械学报, 2018, 49(8): 1-17.
Xie Bin, Wu Zhongbin, Mao Enrong. Development and prospect of key technologies on agricultural tractor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 1-17.
[2] 朱登胜, 方慧, 胡韶明, 等. 农机远程智能管理平台研发及其应用[J]. 智慧农业(中英文), 2020, 2(2): 67-81.
Zhu Dengsheng, Fang Hui, Hu Shaoming, et al. Development and application of an intelligent remote management platform for agricultural [J]. Smart Agriculture, 2020, 2(2): 67-81.
[3] 吴文福, 张娜, 李姝峣, 等. 5T智慧农场管理系统构建与应用探索[J]. 农业工程学报, 2021, 37(9): 340-349.
Wu Wenfu, Zhang Na, Li Shuyao, et al. Construction and application exploration of 5T smart farm management systems [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 340-349.
[4] 朱明, 隋斌, 齐飞, 等. 论中国乡村振兴战略中的农业工程管理创新[J]. 农业工程学报, 2019, 35(2): 1-9.
Zhu Ming, Sui Bin, Qi Fei, et al.Innovation of agricultural engineering management in pursuing rural revitalization strategy in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(2): 1-9.
[5] 姚艳, 牛明雷, 孙法军, 等. 基于微服务架构的农业转移支付项目管理系统设计与实现[J]. 中国农业科学, 2021, 54(15): 3207-3218.
Yao Yan, Zhu Minglei, Sun Fajun, et al. Design and implementation of agricultural transfer payment project management system based on micro-service architecture [J]. Scientia Agricultura Sinica, 2021, 54(15): 3207-3218.
[6] Jiang Ping, Wang Xianghui, Song Hui, et al. Design and implementation system of maintenance engineering analysis for aero-engine [J]. Advances in Aeronautical Science and Engineering, 2021, 12(5): 131-138.
[7] 姚春生, 何丽虹, 陈谦, 等. 农业机械化信息化融合研究[J].中国农机化学报, 2017, 38(8): 1-8, 54.
Yao Chunsheng, He Lihong, Chen Qian, et al. Research on fusion of agricultural mechanization and informatization [J].Journal of Chinese Agricultural Mechanization, 2017, 38(8): 1-8, 54.
[8] 张良, 伍滨涛, 谢景鑫, 等. 北斗導航农机作业面积管理系统设计与试验[J]. 中国农机化学报, 2020, 41(12): 139-146.
Zhang Liang, Wu Bintao, Xie Jingxin, et al. Design and test on agricultural machinery operation area management system of Beidou navigation [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 139-146.
[9] 张俊艺, 冯泽佳, 高磊, 等. 基于Android系统的农机调度管理平台的设计与开发[J]. 中国农机化学报, 2018, 39(5): 91-96.
Zhang Junyi, Feng Zejia, Gao Lei, et al.Design and development of agricultural machinery dispatching management platform based on Android system [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(5): 91-96.
[10] Qinghua G, Zhongkuan W, et al. Design of 3D visualization management platform for intelligent coal preparation plant based on coal preparation information model [J]. Gong-kuang zidonghua. 2022, 48: 54-62.
[11] 武仲斌, 谢斌, 迟瑞娟, 等. 电动拖拉机田间巡航作业驱动转矩管理模型[J]. 农业工程学报, 2019, 35(4): 88-98.
Wu Zhongbin, Xie Bin, Chi Ruijuan, et al. Driving torque management model for electric tractor in field cruise condition [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(4): 88-98.
[12] 段宇峰. 基于RFID的物流定位技术研究[D]. 成都: 电子科技大学, 2016.
Duan Yufeng. Research on RFID logistics position technology [D]. Chengdu: University of Electronic Science and Technology of China, 2016.
[13] 李丽娜, 马俊, 徐攀峰, 等. RFID室内定位技术研究综述[J]. 计算机应用与软件, 2015, 32(9): 1-3, 96.
Li Lina, Ma Jun, Xu Panfeng, et al. Summary of study on RFID indoor localization technology [J]. Computer Applications and Software, 2015, 32(9): 1-3, 96.
[14] 邹承明, 黄明凯. LANDMARC室内定位改进算法[J]. 计算机工程与设计, 2019, 40(11): 3111-3117.
Zou Chengming, Huang Mingkai. Improved LANDMARC algorithm on indoor location [J]. Computer Engineering and Design, 2019, 40(11): 3111-3117.
[15] 谢亚琴, 王超. 基于不同邻近标签数选择的LANDMARC定位算法研究[J]. 南京信息工程大学学报(自然科学版), 2019, 11(5): 621-624.
Xie Yaqin, Wang Chao. An improved LANDMARC method based on different neighbor reference nodes [J]. Journal of Nanjing University of Information Science & Technology (Natural Science Edition), 2019, 11(5): 621-624.
[16] Xu H, Ding Y, Li P, et al. An RFID indoor positioning algorithm based on Bayesian probability and K-nearest neighbor [J]. Sensors, 2017, 17(8): 1806.
[17] Zhang T, Jiao C, Sun H, et al. Application of Internet of Things combined with wireless network technology in volleyball teaching and training [J]. Computational Intelligence and Neuroscience, 2022, 2022.
[18] 申思涵, 洪涛, 吴楷文, 等. 基于RFID的智能图书定位系统[J]. 物联网技术, 2018, 8(12): 20-24.
[19] Kayacan E, Kayacan E, Ramon H, et al. Distributed nonlinear model predictive control of an autonomous tractor-trailer system [J]. Mechatronics, 2014, 24(8): 926-933.
[20] 余鵬翔, 石军锋. 基于SpringBoot框架的群养母猪饲喂站管理系统设计与试验[J]. 中国农机化学报, 2023, 44(3): 149-155, 241.
Xu Pengxiang, Shi Junfeng. Design and experiment of group sow feeding station management system based on SpringBoot framework [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(3): 149-155, 241.
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
指挥控制与仿真(2021年3期)2021-06-15 07:20:06
航空维修与工程(2019年3期)2019-09-10 07:22:44
小学生导刊(2017年15期)2017-05-17 05:44:08
小布老虎(2016年12期)2016-12-01 05:47:00
山东农机化(2015年6期)2015-01-03 08:09:44
中国交通信息化(2014年4期)2014-06-05 03:51:10
北京航空航天大学学报(2013年6期)2013-12-19 08:58:16
电子科技大学学报(2011年3期)2011-02-10 05:45:10
电子世界(2005年6期)2005-04-29 00:44:03
