基于深度特征的煤矿冲击地压和煤与瓦斯突出图像感知报警方法
2024-05-23 08:47:56程继杰
煤炭科学技术 2024年3期
程继杰 ,刘 毅
(中国矿业大学(北京) 人工智能学院, 北京 100083)
0 引 言
煤炭是我国主体能源,其能源主导地位短时间内不会改变[1-3]。我国煤矿以井工开采为主,采掘工作面作为破坏煤岩原有平衡前沿,更易发生冲击地压和煤与瓦斯突出,造成灾害附近区域工作人员被埋或被困,如不及时发现,易导致人员窒息或失血过多而死亡。目前,由于煤矿冲击地压和煤与瓦斯突出灾害诱因复杂、致灾机理尚不完全明确、煤炭开采深度和强度的增加,灾害监测预警防治尚未完全满足安全生产需要[1-2,4-8]。煤矿冲击地压和煤与瓦斯突出仍时有发生,灾害事故发生主要靠人工发现。如能及时发现事故和应急救援,争取黄金救援时间,避免或减少填埋或被困造成的人员伤亡,及时疏通堵塞巷道,有效避免由于瓦斯积聚引发的瓦斯窒息、瓦斯和煤尘爆炸等严重次生灾害,造成大量人员伤亡[9-12]。因此,研究煤矿冲击地压和煤与瓦斯突出灾害感知报警方法具有重要理论意义和实用价值[13-15]。
目前煤矿冲击地压和煤与瓦斯突出监测预警方法主要有钻屑法、应力监测法、电磁辐射监测法[16-17]、微震监测法、声发射监测法、煤岩电荷辐射监测法、电测法、声波探测法[18-20]、顶板离层观测法[21-25]、煤岩体变形测量法等[7-8,26-30]。上述监测预警方法更适合用于灾害预警,但不能替代灾害报警:目前灾害预警方法主要是通过分析各个参数的趋势性变化特征来判断灾害发生的危险性和可能性[4,6,23,31-33],但还无法完全准确预报灾害发生时间、位置和强度等,而在灾害发生瞬间,可能无法及时报警;即便灾害预警方法观测到相关参数异常变化,被认为有冲击危险,但也不一定发生灾害,也不能判定已经发生煤矿冲击地压或煤与瓦斯突出。综上,目前灾害预警方法更适用于长期监测,可有效进行灾害预警,但不能替代煤矿冲击地压和煤与瓦斯突出灾害报警,可作为辅助手段来提高安全性,需要针对性的研究煤矿冲击地压和煤与瓦斯突出监测报警方法。
针对目前灾后大量煤岩抛向采掘工作面和巷道空间的特征研究较少[34-38],并且还未有利用彩色双目视觉技术直接识别灾害造成的颜色和深度特征来进行冲击地压和煤与瓦斯突出感知报警研究,所以笔者提出了基于深度特征的灾害彩色双目视觉感知报警方法,该方法具有监测范围广、成本低、非接触、使用维护方便和信息丰富等优点,可为煤矿冲击地压和煤与瓦斯突出感知报警提供新思路。
1 灾害特征与图像识别方法
冲击地压和煤与瓦斯突出均是由于巷道开拓以及工程扰动等因素破坏了巷道围岩原有平衡,突破了煤岩的承载极限,致使煤岩破碎抛向采掘工作面和巷道空间的煤矿井下严重自然灾害,严重威胁着煤矿的安全生产。
1.1 灾害典型特征
煤矿冲击地压和煤与瓦斯突出发生时能向巷道空间和采掘工作面瞬间抛出大量破碎煤岩,严重破坏巷道和通风系统,造成灾害附近区域工作人员被埋或被困,如不及时发现,易导致人员窒息或失血过多而死亡,并且容易造成瓦斯窒息、瓦斯和煤尘爆炸等严重次生灾害,造成大量人员伤亡。所以冲击地压和煤与瓦斯突出虽然致灾机理不同,但外在显现特征具有明显相似性:
1)一般情况下,煤矿井下设备颜色与灾害抛出煤岩具有明显差异,例如采煤机、液压支架、掘进机、除尘风机、风筒、隔爆水袋、工作台、梭车、带式输送机等,一般外表主要呈橘黄色、灰白色、橙红色、蓝色或深红色等,而灾害抛出煤岩一般呈黑色。可根据上述颜色差异,以非黑色煤矿井下设备为背景,利用彩色双目摄像机进行灾害抛出煤岩捕捉,捕捉范围可限定为彩色图像中发生黑色面积较大增加区域。笔者在国家能源集团宁夏煤业有限责任公司双马煤矿、羊场湾煤矿,采集得到的煤矿井下典型设备颜色特征,如图1 所示。

图1 煤矿井下典型设备颜色特征Fig.1 Color characteristics of typical equipment in coal mine
2)冲击地压和煤与瓦斯突出均会抛出大量破碎煤岩,并且抛出煤岩的短时速度较大,可达50 m/s[39-40],远大于胶轮车、采煤机、掘进机、井下人员以及正常落煤速度(最大为13 m/s)[37,41],可利用彩色双目摄像机识别上述速度差异特征进行灾害感知报警,可限定速度范围:v>13 m/s。
3)瓦斯和煤尘爆炸会造成巷道空间和采掘工作面物体短时速度较高,但也会产生异常高亮[42],可利用异常高亮来排除瓦斯和煤尘爆炸。
4)冲击地压和煤与瓦斯突出会造成采掘工作面和巷道空间出现深度异常特征,主要包括巷道空间和采掘工作面物体深度异常、深度异常物体速度异常。可根据深度异常特征,利用彩色双目摄像机识别冲击地压和煤与瓦斯突出。
1.2 图像识别方法
由于煤矿井下设备长期积累粉尘容易造成瓦斯和煤尘爆炸,所以《煤矿安全规程》规定要及时清理煤矿井下设备上的粉尘[41],使得煤矿井下设备颜色特征明显,有利于基于背景颜色提取煤矿冲击地压和煤与瓦斯突出特征。
冲击地压和煤与瓦斯突出可造成数百米范围内的巷道和设备损坏。为保证能很好地进行灾害感知报警,需对灾害感知装置进行多点布置:掘进工作面、回采工作面、进风巷道入口、回风巷道入口、巷道中间,以及主运输、辅助运输大巷等位置。由此,虽然灾源附近的灾害感知装置会遭到破坏,但远离灾源未被破坏的灾害感知装置仍能进行灾害的感知报警。
煤与瓦斯突出发生时的瓦斯释放量、浓度升高范围、浓度升高速度范围以及波及范围,都远大于冲击地压。所以当监测到采煤工作面、掘进工作面、进风巷、回风巷等多个地点甲烷浓度大幅升高或达到报警值,则说明发生煤与瓦斯突出事故,否则说明发生冲击地压事故。
针对灾害发生时大量煤岩抛向采掘工作面和巷道空间的颜色和深度特征,提出基于深度特征的煤矿冲击地压和煤与瓦斯突出图像感知报警方法,如图2 所示。

图2 基于深度特征的煤矿冲击地压和煤与瓦斯突出图像感知报警方法Fig.2 Coal mine rock burst and coal and gas outburst image perception alarm method based on depth characteristics
1)在煤矿井下掘进工作面顶部、采煤工作面液压支架顶部、巷道顶板以及靠近顶板等位置多点布置带有补光灯的彩色双目摄像机,以煤矿井下与灾害抛出煤岩有鲜明颜色差异的设备为背景,实时采集彩色图像和深度图像,并利用多点布置的甲烷传感器监测环境甲烷浓度;
2)监测彩色图像是否出现颜色变化;
3)如果掘进巷道工作面、回采工作面、进风巷道入口、回风巷道入口、巷道中间以及主运输、辅助运输大巷等位置监测到图像颜色发生较大变化,则监测彩色图像平均亮度是否小于设定的亮度阈值,否则持续监测彩色图像颜色变化;
4)如果平均亮度小于设定亮度阈值,监测深度图像是否发生较大变化,否则持续监测彩色图像颜色变化;
5)如果深度图像发生较大变化,监测导致深度图像较大变化物体速度是否大于设定速度阈值(v>13 m/s),否则持续监测彩色图像颜色变化;
6)如果物体速度大于设定速度阈值,利用多点布置甲烷传感器监测甲烷浓度是否迅速升高或达到报警值,否则持续监测彩色图像颜色变化;
7)如果监测到多个不同地点的环境甲烷浓度大幅升高或达到报警值,说明发生煤与瓦斯突出事故,否则说明发生冲击地压事故;
8)判断是否已启动应急响应,如果已启动,退出报警,否则继续报警。
2 图像识别方法具体实现
2.1 颜色变化特征识别
灾害发生时,煤矿井下设备被大量抛出煤岩覆盖、遮挡或掩埋,抛出煤岩主要为黑色,而煤矿井下设备主要为非黑色,存在明显颜色差异。本文利用HSV 颜色模型[43]提取彩色图像黑色区域,利用ViBe 算法[44]识别黑色区域面积是否较大增加,如果较大增加,则识别彩色图像平均亮度,否则持续利用HSV 模型[43]和ViBe 算法[44]监测彩色图像黑色区域面积是否出现较大增加。
HSV 是根据颜色直观特性由A.R.Smith 在1978年创建的一种颜色空间,也称六角锥体模型[43]。该模型中有3 个颜色参数:色调H、饱和度S、明度V。彩色图像从RGB 颜色模型转换到HSV 颜色模型的关系式如下(式中R、G、B为归一化后的结果)[43]:
通过设定HSV 颜色模型[43]相应参数范围,以针对性地分割出图像黑色区域,然后利用ViBe 算法[44]识别出监视范围内黑色面积变化的区域。
2.2 平均亮度特征识别
利用HSV 颜色模型[43]的平均明度值是否小于设定明度阈值(设为135,可根据实际情况进一步调整),来判断彩色图像亮度是否正常,如果平均明度小于设定明度阈值,说明图像亮度正常,进行深度图像变化特征识别,否则持续利用HSV 颜色模型[43]和ViBe 算法[44]监测彩色图像黑色区域面积是否出现较大增加,关系式如下:
式中,Bave为图像平均明度值;N为图像像素总数;(x,y)为图像中像素点的坐标;B(x,y)为坐标点为(x,y)处的像素明度;BT为设定的亮度阈值。
2.3 深度变化特征识别
采用彩色双目摄像机采集采掘工作面和巷道空间的深度图像,并利用ViBe 算法[44]识别深度图像发生变化区域面积是否出现较大增加,如果出现较大增加,说明出现深度异常现象,进行深度异常区域扩散速度识别,否则持续利用HSV 颜色模型[43]和ViBe 算法[44]监测识别彩色图像黑色区域面积是否出现较大增加。
彩色双目立体视觉是利用立体匹配算法,通过2 个彩色单目摄像机同时获取同一场景的2 幅彩色图像,根据三角原理计算视差信息并转换成深度信息,彩色双目摄像机成像模型如图3 所示[45]。

图3 双目摄像机成像模型Fig.3 Binocular camera imaging model
如图3 所示,根据三角形相似原理可得:
整理可得:
其中,Zi为空间点Pi离双目摄像机的距离,m;b为双目摄像机基线长度,m;f为左右单目摄像机焦距,像素;xli-xri为点Pi在左右单目摄像机的视差,px。
双目立体视觉测量方法,可在瞬间完成图像的获取,具有系统结构简单、精度合适、效率高、成本低等优点。设摄像机感光器件的单个像素物理尺寸为dx×dy,图像坐标系中的坐标(x,y)与像素坐标系中的坐标(u,v)之间关系如图4 所示:

图4 图像坐标系与像素坐标系关系Fig.4 Relation between image coordinate system and pixel coordinate system
可表示为:
设S为图像坐标系下每毫米的像素个数,则:
两式进行相减运算:
将Zi代入上式:
由此可知,只要能够获取至少一个像素的像素差,结合摄像机的焦距和基线距离,就可获取到对应物体的深度。并且在X、Y方向上相机坐标系和图像坐标系有相似关系
同理可得:
综上,如果知道空间点Pi在左右摄像机的对应关系,可求得视差(uli-uri),就能恢复图像在相机坐标系下的三维坐标,进而根据四大坐标系关系,映射出在世界坐标系的位置,即物体在真实世界的坐标。
深度图像又称距离影像,在深度数据流的图像帧中,每个像素点的灰度值可用于表征场景中某一点距离摄像机的远近。利用ViBe 算法[44]识别深度图像发生变化区域面积是否出现较大增加,如果出现较大增加,说明出现灾害发生时的深度异常现象,进行深度异常区域扩散速度识别。
2.4 深度异常扩散识别
利用彩色双目摄像机采集深度图像,结合深度图像和巷道空间深度异常物体的数学关系,识别深度异常物体速度,如果出现深度异常物体速度大于设定阈值,说明出现灾害速度异常,进行灾害综合判识报警,否则持续利用HSV 模型[43]和ViBe 算法[44]监测彩色图像黑色区域面积是否出现较大增加,测速方法示意图如图5 所示。
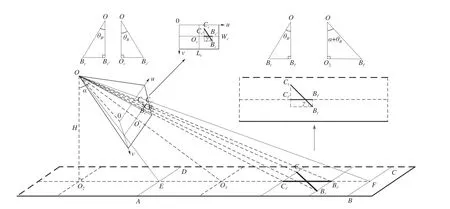
图5 彩色双目摄像机测速方法示意Fig.5 Schematic of color binocular camera speed measurement method
如图5 所示,彩色双目摄像机由两个参数相同的彩色单目摄像机组成,并安装巷道顶板O点,彩色双目摄像机等效光轴OO1与深度图像成像平面相交于Oc、与巷道底板平面相交于O1,则∠O1OO2为彩色双目摄像机倾角α,彩色双目摄像机巷道走向方向的视场角2θL=2∠O1OE=2∠O1OF,四边形ABCD为巷道底板区域,当大面积深度异常物体从Bt移动到Ct时,对应的深度图像中从Bc移动到Cc,那么大面积深度异常物体轨迹BtCt映射到巷道底板中轴线方向上为线段Bt’Ct’,深度图像中BcCc映射到巷道底板中轴线方向为线段Bc’Cc’。
设当物体从Bt经过一段时间Δt移动到Ct时,双目摄像机监测到对应的深度分别为ZB和ZC。在像 素 坐 标 系 中,设Bc(xB,yB),Cc(xC,yC),并 且Oc,那么。由图5 可知:
由上式可得:
同理,可得:
那么,可得:
则:
式中,v为物体从移动起点Bt经过一段时间Δt后移动到终点Ct位置的移动速度, m/s;xlb-xrb为彩色双目摄像机监测到物体移动起点Bt在左右彩色单目摄像机的视差,px;xlc-xrc为彩色双目摄像机监测到物体移动起点Ct在左右彩色单目摄像机的视差,px;xB,yB分别为在像素坐标系中物体移动起点的横纵坐标,px;xC,yC分别为在像素坐标系中物体移动终点的横纵坐标,px;f为彩色双目摄像机中单目彩色摄像机的焦距,px;Lc,Wc分别为双目摄像机所成的深度图像像素尺寸的长和宽,px;α为彩色双目摄像机相对于竖直向下的前倾角度,(°)。
为增大彩色双目摄像机的监视范围,并且还能很好的识别灾害速度特征,彩色双目摄像机最佳倾角为:
1)在掘进工作面彩色双目摄像机覆盖范围为满足下述条件的最大倾角:
①监视区域只覆盖巷道的底部和两帮;②监视区域内最远目标,在深度图像中一像素/帧的速度对应真实速度的n倍等于设定阈值。
其中,α为彩色双目摄像机的前倾角度,(°);θL为彩色双目摄像机在沿巷道轴线方向的视场角的一半,(°);H为彩色双目摄像机安装高度,m;f为彩色双目摄像机中单目摄像机的焦距,m;vT为设定的速度阈值,m/s;Δt1为一帧的时间;Δs1为一个像素长度;v为在深度图像中,覆盖区域最远目标移动一个像素长度每帧时目标真实速度,m/s。
在回采工作面彩色双目摄像机监视范围为同时满足下述情况的最大倾角:①监视区域只覆盖回采工作面底部和液压支架区域(不包括采煤工作面);②监视区域内最远目标,在深度图像中一像素/帧的速度对应真实速度的n倍等于设定阈值。
其中,Δw为彩色双目摄像机在垂直巷道轴线方向上与采煤面的距离,m。
为了能够识别灾害发生时大量煤岩抛出的较高速度,可综合彩色双目摄像机的视场角、前倾角度、帧频以及安装高度,来估算能识别的最大速度:
式中,vmax为彩色双目摄像机能识别的最大速度,m/s;H为彩色双目摄像机安装高度,m;Δt1为一帧的时间,s;α为彩色双目摄像机的前倾角度,(°);θL为彩色双目摄像机沿摄像机光轴方向的视场角的一半,(°)。
由于冲击地压和煤与瓦斯突出抛出的大量破碎煤岩,形状不规则并有不可预知性,可利用深度图像发生较大变化区域的最大轮廓中心点作为灾害抛出煤岩的特征点,根据灾害抛出煤岩特征点的移动速度可得出灾害抛出煤岩速度。
综上所述,结合深度图像和巷道空间深度异常物体的数学关系,如果识别到深度异常物体速度大于设定阈值,说明出现灾害速度异常现象,进行灾害综合判别报警。
2.5 灾害综合判别报警
当识别到灾害发生时的颜色、亮度、深度和速度特征,那么判断甲烷浓度是否迅速升高或达到报警值,如果采煤工作面、掘进工作面、进风巷道、回风巷道等多个地点环境甲烷浓度均大幅升高或达到报警值,说明发生煤与瓦斯突出事故,否则说明发生冲击地压事故。
3 模拟试验以及结果分析
为验证提出的基于深度特征的煤矿冲击地压和煤与瓦斯突出图像感知报警方法的可行性与有效性,设计了灾害颜色和深度异常变化特征模拟试验装置,采用HNY-CV-002 可变基线彩色双目摄像机参数:80 mm 基线值,30FPS,3.4 mm 焦距,71°*55°视场角。设定彩色双目摄像机识别物体移动速度阈值vT=13 m/s。采用Python3.7 编程,在Intel i7、8G 内存、6 核2.6GHz、Pycharm2019 上进行了模拟灾害发生时颜色、亮度、深度、速度特征的识别。
3.1 试验方案总体思想
由于灾害的特殊性,目前无法通过真实灾害,来验证基于深度特征的煤矿冲击地压和煤与瓦斯突出感知报警方法的可行性。在确保安全性的前提下,简化了灾害模拟试验,利用比重、颜色相近的橡胶球替代灾害抛出煤岩;利用PVC 管模拟煤矿井下受限空间;利用在PVC 管内布置煤矿井下设备图片来模拟与抛出煤岩有着鲜明颜色差异的设备;利用高压鼓风机作为动力装置,通过高速气流冲击橡胶球使其高速抛向PVC 管内,来模拟灾害大量煤岩抛出过程;利用彩色双目摄像机进行图像采集。灾害模拟试验装置示意图如图6 所示。
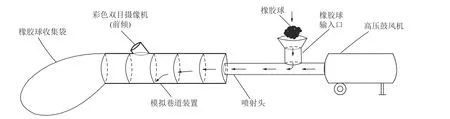
图6 灾害模拟试验装置示意Fig.6 Schematic of the disaster simulation experiment device
3.2 摄像机类型的选择
煤矿井下巷道净断面最低高度为1.8 m[41],以此为彩色双目摄像机安装高度:
1)根据式(18)可得彩色双目摄像机在掘进工作面的最佳倾角为30°,根据式(20)可得在最佳倾角下彩色双目摄像机监测的最大速度为82 m/s,远大于设定的速度阈值vT=13 m/s。
2)根据式(19)并结合Δw=2.8 m 可得彩色双目摄像机在采煤工作面的最佳倾角为30°,进一步根据式(20)可得在最佳倾角下彩色双目摄像机监测的最大速度为82 m/s,远大于设定的速度阈值vT=13 m/s;根据式(19)并结合Δw=1.55 m 可得彩色双目摄像机在采煤工作面的最佳倾角为13°,进一步根据式(20)可得在最佳倾角下彩色双目摄像机监测的最大速度为60 m/s,也远大于设定的速度阈值vT=13 m/s。
综上可知,无需高速彩色双目摄像机,即用普通彩色双目摄像机可满足识别灾害抛出煤岩速度特征要求。
3.3 模拟巷道尺寸选取
为简化复杂度与确保安全性,在满足灾害特征模拟与识别效果的情况下,应减小模拟装置尺寸。以掘进工作面为例,模拟掘进巷道尺寸需同时满足式(18)和式(20),即:
为求出h和α的对应关系,根据θL=27.5°、f=0.003 4 m、Δs1=2.646×10-4m/像 素、、vT=13 m/s。当h=0.2 m,α≈52°时,可识别的最大速度vmax≈30 m/s,远大于设定速度阈值。选取ϕ0.315 m 的PVC管模拟煤矿井下巷道,即当h=0.3 m(安装高度),α≈50°,可识别的最大速度vmax≈37 m/s,远大于设定速度阈值,满足试验要求,此种情况下巷道模拟装置长度最少应为=1.23 m。
3.4 模拟试验现场情况
基于彩色双目视觉来识别灾害模拟试验装置模拟灾害发生时的颜色和深度异常变化特征,并进一步结合多点监测到的甲烷浓度是否正常,来区分冲击地压和煤与瓦斯突出。试验装置情况如图7 所示。

图7 试验装置情况Fig.7 Experimental device situation
如图7 所示,在灾害模拟装置中,采用彩色双目摄像机进行彩色图像和深度图像采集,来识别灾害的颜色和深度异常变化特征,以很好地模拟真实巷道环境、图像采集位置以及视频采集效果。其中采用长约1.4 m、直径0.315 m 的PVC 管模拟巷道与受限空间;采用ϕ10 mm 的黑色橡胶球来模拟灾害抛出的破碎煤岩;采用高压轴流鼓风机(最大功率5.5 kW、最大风速69.5 m/s)作为模拟灾害动力装置;利用IQ 型10.5 GHz 多普勒测速雷达测得试验装置抛出橡胶球的最大速度大于15 m/s,可满足速度要求;采用将彩色双目摄像机监视的PVC 内管区域视为煤矿井下与灾害抛出煤岩有鲜明颜色差异的设备;采用将彩色双目摄像机安装于PVC 管顶部以模拟煤矿井下巷道顶板监视位置。
其中彩色双目摄像机监视的PVC 内管区域,贴有煤矿井下设备图片,以更好地模拟煤矿井下背景设备区域,如图8 所示。

图8 监视区域背景颜色特征Fig.8 Monitoring area background color characteristics
3.5 模拟试验结果分析
在现有试验装置和彩色双目摄像机参数下,彩色双目摄像机最佳倾角为50°,并确定为灾害模拟试验彩色双目摄像机倾角。模拟灾害发生过程中的深度变化特征,如图9 所示。
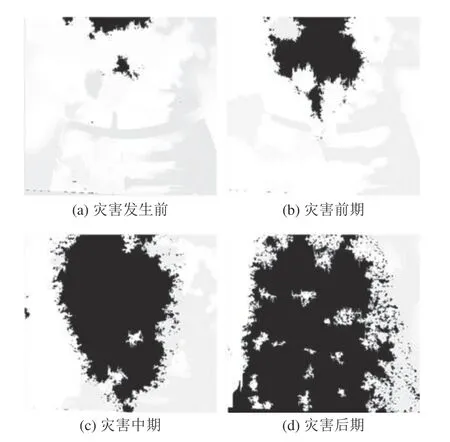
图9 灾害发生过程中的深度变化特征Fig.9 Characteristics of depth variation in the process of disaster occurrence
如图9 所示,深度图像中颜色变化区域即为灾害抛出煤岩造成的深度变化区域,颜色变化区域增加即表示灾害抛出煤岩扩散过程。
对灾害识别方法进行了代码实现。当模拟灾害发生时,可识别出模拟灾害发生时的颜色、亮度、深度和速度特征。并且当深度变化区域扩散速度大于设定速度阈值时,灾害报警并且保存了灾害瞬间的彩色图像,其中利用绿色轮廓框选出满足灾害发生时颜色、亮度、深度和速度变化特征的区域,识别效果如图10 所示。

图10 深度变化区域扩散速度大于设定阈值的识别效果Fig.10 Recegnition effect image for depth-varying regions with diffusion rate greater than the set threshold value
综上可知,提出的基于深度特征的灾害图像感知报警方法能够识别到灾害发生时颜色、亮度、深度、速度变化特征,可进一步根据多点监测到的环境甲烷浓度是否迅速升高或达到报警值,来判别冲击地压和煤与瓦斯突出。即利用灾害颜色和深度异常变化特征模拟试验验证了本文提出的基于深度特征的灾害图像感知报警方法的可行性与有效性,并且能够很好地排除瓦斯和煤尘爆炸等产生异常高亮灾害的干扰。
在工程应用中,可根据实际工况进一步优化灾害发生时颜色、亮度、深度以及速度特征识别方法。其中:
1)灾害发生时产生的尘埃可能会遮挡摄像机的视线,导致图像模糊或失真;湿度和气体浓度可能会改变摄像机的性能,影响图像的清晰度和深度信息的准确性。在实际应用中,我们可采取以下措施:采用抗干扰能力强的摄像机,能够在复杂的井下环境中稳定地采集高质量的彩色图像和深度图像;在系统中增加环境感知模块,实时监测井下的环境因素,如尘埃浓度、湿度和气体浓度等,当环境因素超过一定阈值时,系统会自动调整摄像机的参数或启动相应的保护机制;采用先进的图像后处理技术,对采集到的彩色图像和深度图像进行去噪、增强等处理,提高图像的质量;建立实时反馈机制,当系统检测到环境因素对图像质量产生严重影响时,能够及时向操作员发送警报,以便采取相应的措施。
2)灾害产生的震动对于双目摄像机采集的图片质量会产生影响,在实际应用中,为减轻这种影响,可采取以下措施:选择稳定性较高的双目摄像机,并对其进行抗震优化设计,以提高其在灾害环境下的稳定性;在采集图片时,采用快速曝光技术,以减少震动对图片质量的影响;对采集到的图片进行后处理,采用图像增强技术对模糊或失真的图片进行修复和改善,从而获得更为清晰、准确的图片信息。
4 结 论
1)揭示了煤矿冲击地压和煤与瓦斯突出的深度特征:灾害发生时大量煤岩抛向采掘工作面和巷道空间,深度变化明显;煤矿井下胶轮车、采煤机、掘进机、井下人员以及正常落煤等,也会造成深度变化,但变化速度远低于冲击地压和煤与瓦斯突出;因此,灾害抛出煤岩深度变化与煤矿井下胶轮车、采煤机、掘进机、井下人员以及正常落煤等有明显差异。
2)提出了基于深度特征的煤矿冲击地压和煤与瓦斯突出图像感知报警方法:在煤矿井下掘进工作面顶部、采煤工作面液压支架顶部、巷道顶板以及靠近顶板等位置多点布置带有补光灯的彩色双目摄像机,以煤矿井下与灾害抛出煤岩有着鲜明颜色差别的设备为背景,实时采集采掘工作面和巷道空间彩色图像和深度图像;如果掘进工作面、回采工作面、进风巷道入口、巷道中间、回风巷道入口、主运输大巷、辅助运输大巷等位置监测到图像颜色发生较大变化、彩色图像平均亮度小于设定阈值、深度图像发生较大变化、导致深度图像发生较大变化物体的速度大于设定阈值(V>13 m/s),与此同时采煤工作面、掘进工作面、进风巷道入口和巷道中间、回风巷道的入口和巷道中间等多个位置均监测到甲烷浓度大幅升高或达到报警值,表明发生煤与瓦斯突出事故,否则表明发生冲击地压事故。
3)提出了彩色双目摄像机识别煤矿冲击地压和煤与瓦斯突出最佳倾角确定方法:监视区域只覆盖巷道底部和两帮;监视区域最远端物体一帧移动一个像素对应速度的n倍等于速度阈值。提出了彩色双目摄像机的测速方法:利用深度异常区域的中心点作为识别深度异常物体移动速度的特征点,根据深度图像与巷道空间深度异常移动物体的数学关系,来识别深度异常物体的移动速度,可精简高效地识别出煤矿井下恶劣条件下灾害抛出煤岩移动速度。
4)设计了煤矿冲击地压和煤与瓦斯突出颜色、深度、速度和亮度特征模拟装置,验证了本文提出的基于深度特征的灾害图像感知报警方法的可行性与有效性。可更好地满足煤矿恶劣条件下冲击地压和煤与瓦斯突出感知报警的需求。可及时发现事故和应急救援,争取黄金救援时间,避免或减少填埋或被困造成的人员伤亡,并及时疏通堵塞巷道,有效避免由于瓦斯积聚引发的瓦斯窒息、瓦斯和煤尘爆炸等严重次生灾害,造成大量人员伤亡。
猜你喜欢
选煤技术(2023年4期)2024-01-02 03:10:50
电子制作(2019年20期)2019-12-04 03:51:38
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
现代计算机(2016年11期)2016-02-28 18:35:20
江西煤炭科技(2015年2期)2015-11-07 03:10:16
江西煤炭科技(2015年1期)2015-11-07 03:06:32
中国煤层气(2015年4期)2015-08-22 03:28:01
新闻前哨(2015年2期)2015-03-11 19:29:25