自闭症儿童社交机器人外观形态设计研究
2024-05-11 11:44:42孙福旭张丙辰王瑞
美与时代·上 2024年3期
孙福旭 张丙辰 王瑞
摘 要:本文针对目前ASD儿童社交机器人的外观形态设计问题,从功能、情感、市场多方面分析社交机器人的设计需求。首先,笔者通过走访调研,获取机器人功能需求,并通过Kano模型确定最终功能定位;其次,收集机器人样本,对其进行分类,利用PAD情感模型获取用户情感倾向,结合市场调研确定设计定位;最后,结合Kano模型和PAD情感模型获得的数据分析,总结ASD儿童社交机器人的设计原则。利用Kano模型和PAD情感模型获取设计需求,可以为ASD儿童的机器人设计提供理论依据,更好地促进ASD儿童干预机器人的发展。
关键词:Kano模型;PAD情感模型;ASD儿童;社交机器人;造型设计
基金项目:本文系2022年江苏师范大学研究生科研与实践创新计划项目(2022XKT0362)阶段性研究成果。
美国疾病控制与预防中心公布的最新自闭症谱系障碍(Autism Spectrum Disorders,ASD)儿童患病率报告显示,每44名儿童中就有1名ASD患者,其主要症状为社会交往障碍、兴趣狭隘和重复刻板行为[1]。目前我们针对ASD还没有药物可以治疗,但通过干预训练可以改善情况,而且越早干预效果越好。随着技术的发展,将人形机器人用于ASD儿童干预训练正成为一个新的趋势。一方面,机器人的言语和动作可控制,具有规律性,可以保证干预动作的准确性和重复性;另一方面,ASD儿童更喜欢非生命物体,机器人在外观上与人类存在区别,可以有效缓解ASD儿童与外界交往时的抵觸情绪[2]。机器人不只是一个玩具,更像是儿童的伙伴。因此在设计机器人时,我们需要充分考虑功能与形态的关系,满足其功能与情感需求,从而提升干预训练的效果。
一、研究背景
(一)ASD儿童介绍
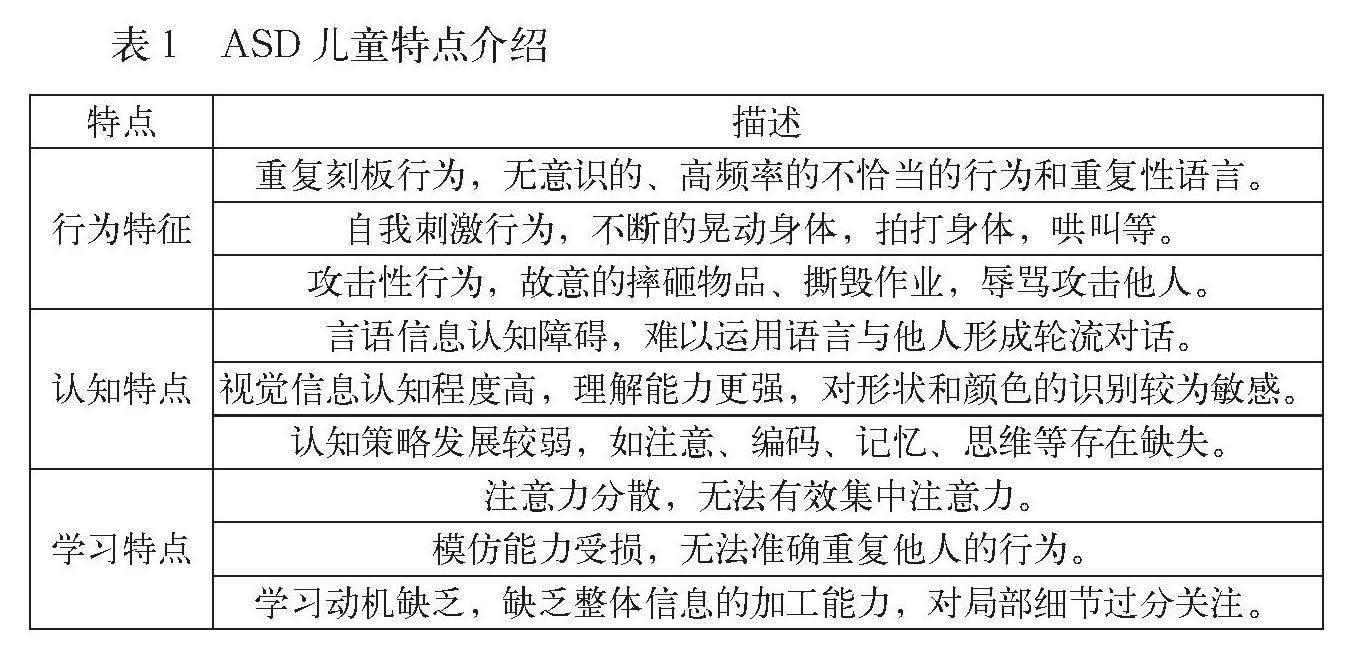
自闭症又称孤独症,是一种广泛性的发育障碍。它是一种天然的发展性障碍,与父母的教育方式、性格特点等都无关。ASD儿童往往与普通儿童存在差异,在行为特征、认知特点、学习特点等方面均存在一定缺陷(如表1),对患者家庭造成沉重负担。3~6岁是ASD儿童思维和学习能力逐渐形成、发展的时期,也是进行干预训练的最佳时期。该时间段内对儿童进行干预治疗,能够最大限度的激发ASD儿童的潜能,最大程度减少ASD儿童长远发展过程中遇到的问题[3]。
(二)社交机器人应用场景及功能介绍
社交机器人是指以人类的社交模式运行和互动的机器人。1976年,机器人首次被应用于ASD儿童社交行为干预训练,后被发现其简化的外形设计,易于操控的交互方式,更容易引起ASD儿童的兴趣,改善他们的社交沟通能力,也减轻了康复人员的工作压力[4]。近几年,机器人变得更加灵活智能,可以满足越来越多的功能和场景。目前,社交机器人的主要应用场景及功能包括:
1.早期诊断:传统的自闭症诊断依赖于医生的经验,而机器人能提供标准化诊断流程。它们通过与儿童互动记录社交信号和行为,从而获得有效数据,无需医生现场操作(如图1)。
2.模仿:模仿是儿童了解世界的主要方式,通过模仿可以学习动作、语言、表情,模仿的建立需要教辅人员重复的动作教学,而机器人可编程,可以很好地满足干预训练的要求。机器人与人体结构相似,简化的外观更容易被儿童接受,并可对儿童的动作进行评估与反馈(如图2)。
3.眼神交流和共同注意:眼神交流是面对面交往所必需的,但ASD儿童往往不与他人对视。机器人可以通过感应器感受与儿童的距离,时刻保持近距离接触。当儿童进行眼神交流时,儿童会得到奖励。此外,机器人可以引导孩子的注意力,指导儿童与他人通过眼神动作等共同关注到同一个目标,还可以判断儿童的眼神注视方向,提高共同注意水平(如图3)。
4.情绪识别和表达:机器人可以模仿人类面部表情,如开心、生气、恐惧等。自闭症谱系障碍儿童对于面部表情识别以及肢体语言等方面的理解不足,这与人的面部表情线索比较复杂,变换比较快有一定的关系。而机器人的表情或情绪是经过程序化设计的,比较单一的,易于他们识别(如图4)。
5.游戏互动:机器人通过游戏可以使自闭症谱系障碍儿童理解和掌握交流的技能。另外,自闭症儿童存在难以参与想象性游戏的障碍,相对于人来说,自闭症儿童与机器人的互动更为融洽。机器人技术可创造一个简单的交互式环境,以“同伴”身份与自闭症儿童进行游戏互动,训练各种技能(如图5)。
(三)社交机器人形态设计研究现状
市面上的社交机器人种类繁多,它们在外观、行为和用途上均有所不同。目前对于机器人的形态研究,国内外学者做出了大量的探究。
国内,侯婷婷等[5]研究表明,使用类人形机器人进行戏剧表演干预可以增强ASD儿童的叙事表达和理解能力。陈国强等[6]指出机身轮廓线、显示屏、头部形状、整体尺寸、色彩和活动方式等会对用户的感性意象产生影响。王艳群等[7]运用眼动追踪方法展开实验,了解了ASD儿童对基本几何形、仿生形、不规则形机器人的视觉偏好。
国外,AlfioPuglisi等[8]指出具有拟人外观的社交机器人是最佳的干预实践工具,能提高ASD儿童眼神交流和社交技能。Robins等[9]设计了一款弱化细节,减少复杂性的人形机器人KASPER,并证明了其对ASD儿童的有效性。John等[10]指出机器人可以分为不同的类型,如动物机器人、仿人机器人、拟物机器人等。某些情况下,ASD儿童喜欢非人形机器人,如动物机器人、车辆机器人。类人机器人可能更受青睐,这是因为通过类人机器人学到的技能可以推广到其他人身上。
可以看出,机器人能够有效的干预ASD儿童社交行为,不同类型的机器人有其独特的优势。ASD儿童社交机器人造型设计不只是单纯的外观设计,机器人往往被儿童视为玩伴,其造型是与用户产品交互的中介,因此,必须充分考虑产品的功能设定和用户的心理特征及情感体验。
二、ASD儿童社交机器人设计需求定位
(一)基于Kano模型的功能需求定位
1.确定功能需求
本团队通过走访本地福利院、儿童康复医院以及儿童发展中心等相关机构,采访多名教辅人员以及相关行业专家,并查阅书籍文献,与专家团进行深度访谈,了解ASD儿童机器人的主要功能需求,后邀请3名儿童产品设计专家以及多名产品设计研究生,筛选出9项社交机器人的核心功能设计需求如图6。
图6 核心功能设计需求
2.基于Kano模型的功能需求分析
基于Kano模型的用户需求分类主要包括4个步骤:Kano问卷设计、用户需求整理、满意度系数计算和需求分类、剔除无差异需求和反向型需求。Kano模型按照正向问题和负向问题的回答填写需求分类表(如表2)是通过把产品服务的具体属性转化成用户需求,依据需求要素的详细分类,寻求和理解用户对于这些需求的态度,以指导设计师做相关决策[11]。
表2 需求分类表
不具备某需求
非常喜欢 喜欢 没意见 不喜欢 很不喜欢
具备某需求 非常喜欢 —— A A A O
喜欢 R I I I M
没意见 R I I I M
不喜欢 R I I I M
很不喜欢 R R R R ——
为了更加准确地判断用户的需求分类,需要计算用户满意度系数比值,满意度系数计算公式如下:
其中,表示相对满意度系数,即产品具备某需求时对用户满意度的影响;表示相对不满意度系数,即产品不具备某需求时对用户满意度的影响。、、、分别表示在问卷调查中,用户对于同一需求问题选择该类需求类型的比值。
用户满意度系数比值即为/的绝对值,的取值范围如表3所示。这种分类方法既可以对用户需求指标进行准确的分类,又可以清楚的了解到具备或者不具备某需求时对用户满意度的影响程度。
表3 对应的需求类型
范围 <0.9 0.9~1.1 >1.1
需求类型 M O A
根据9项功能需求,进行Kano模型的双因素问卷设计,本次实验的被试主要为具有丰富经验的教辅人员、专家及儿童家长。共发放问卷105份。收回90份,有效问卷85份,最终问卷调研结果如表4所示。
3.功能需求定位
由表4可知,用户需求X3、X4为兴奋型需求,是提升魅力、带来愉悦的用户体验的关键因素,应予以重视;用户需求X5、X8、X9为期望型需求是影响用户满意度的重要的影响因素,也是建立用户忠诚度的关键要素;X1、X2、X6为基本型需求是基础设计元素,最大程度降低用户不满意度;X7为无差异需求,是用户较少关注的需求,对机器人设计产生较小影响,应予以剔除。
(二)基于PAD情感模型的造型需求定位
1.收集造型样本
本课题组走访相关康复机构、医院,查阅相关文献书籍,浏览主流购物平台以及各大机器人品牌官网,共计收集整理132款干预机器人样本造型。后团队邀请20位从事产品设计相关专业的研究生对其进行分类,结合相关参考文献,将机器人大致分为拟物型、动物型、类人型、真人型;在上述基础上,进一步结合销量和获奖情况进行筛选,我们选取造型特征最为显著、差异性最大的机器人图片作为典型性样本。以R1\R2\R3\R4\R5\R6\R7\R8对样本进行编号,样本如表5。
2.基于PAD情感模型的造型需求分析
Mehrabian等人[12]提出了一种维度情感模型——PAD三维情感模型,將人的情绪分为三个维度,即愉悦度P(Pleasure-Displeasure)、激活度A(Arousal-Nonarousal)和优势度D(Dominance-Submissiveness),可以快速直观的测量用户情感倾向。对于愉悦度(P)、唤醒度(A)、支配度(D)的测定,目前最流行的工具是Bradley 和 Lang在PAD 三维情绪模型的基础上,于1994年提出的图像化情绪量表SAM[13],如图7。SAM可以很好地追踪个人对情感刺激的反应,并且图形化量表更侧重被试对情绪反应的感觉与知觉,其优势在于可以快速地进行自我情绪评价,且界面友好。三行小人图标分别代表对应的三个维度,根据个人感受在对应位置勾选即可得到其情感反应。
由于ASD儿童的语言表达能力较弱,故本次实验的被实验对象均为具有丰富经验的教辅人员和家长,实验联系徐州市康复医院、五彩鹿儿童行为矫正中心、禾润福利院的教辅人员及家长填写问卷,首先对被实验对象详细讲解实验流程和要求,并介绍语义量表中每个评分等级的含义。实验时,让被实验对象观察实验样本,并在设计人员的指导下在语义量表中的对应位置勾选,最后进行汇总分析,得出P、A、D值。
3.造型需求定位
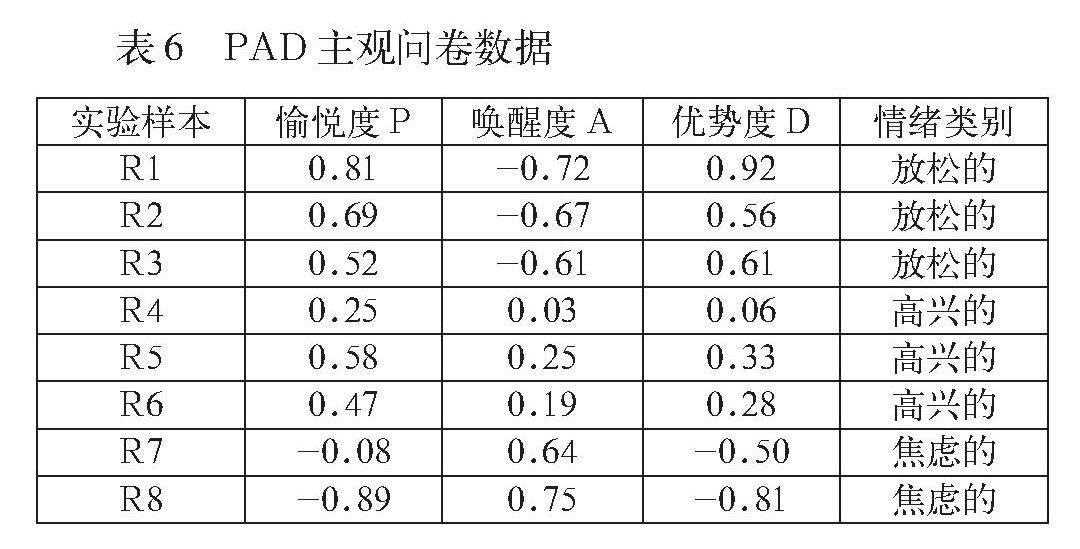
根据上述实验设计及方法,测定了每位被试在观看不同机器人样本时对应的P值、A值、D值,经统计分析后得到各个平均值。PAD情绪模型有三个维度,将情绪划分为八类,如+P+A+D,代表高兴的;-P-A-D,代表无聊的;+P+A-D,代表依赖的;-P-A+D,代表蔑视的;+P-A+D,代表放松的;-P+A-D,代表焦虑的;+P-A-D,代表温顺的;-P+A+D,代表敌意的。具体情绪评分结果和情绪类别如表6。
愉悦度代表ASD儿童看到机器人后内心被激发的愉悦程度。根据实验结果显示,ASD儿童的愉悦度表现为拟物型>类人型>动物型>真人型。因此,拥有一定拟人度,造型圆润统一的造型可以带来更高的愉悦度。
唤醒度代表ASD儿童看到机器人样本材料后神经生理激活水平及兴奋程度。根据实验结果显示,ASD儿童的唤醒度表现为真人型>类人型>动物型>几何型。唤醒度并非越高越好,过高容易导致用户疲劳。因此,类人型和动物型的机器人处于较为适中的唤醒度。
优势度代表ASD儿童看到机器人样本材料后内心被控制的程度。根据实验结果显示,ASD儿童的优势度表现为几何型>动物型>类人型>真人型。因此,为了增加儿童的优势度,使其更容易操作,应当弱化产品的细节,几何简约的造型会带来更高的优势度。
(三)基于市场调研的CMF设计定位
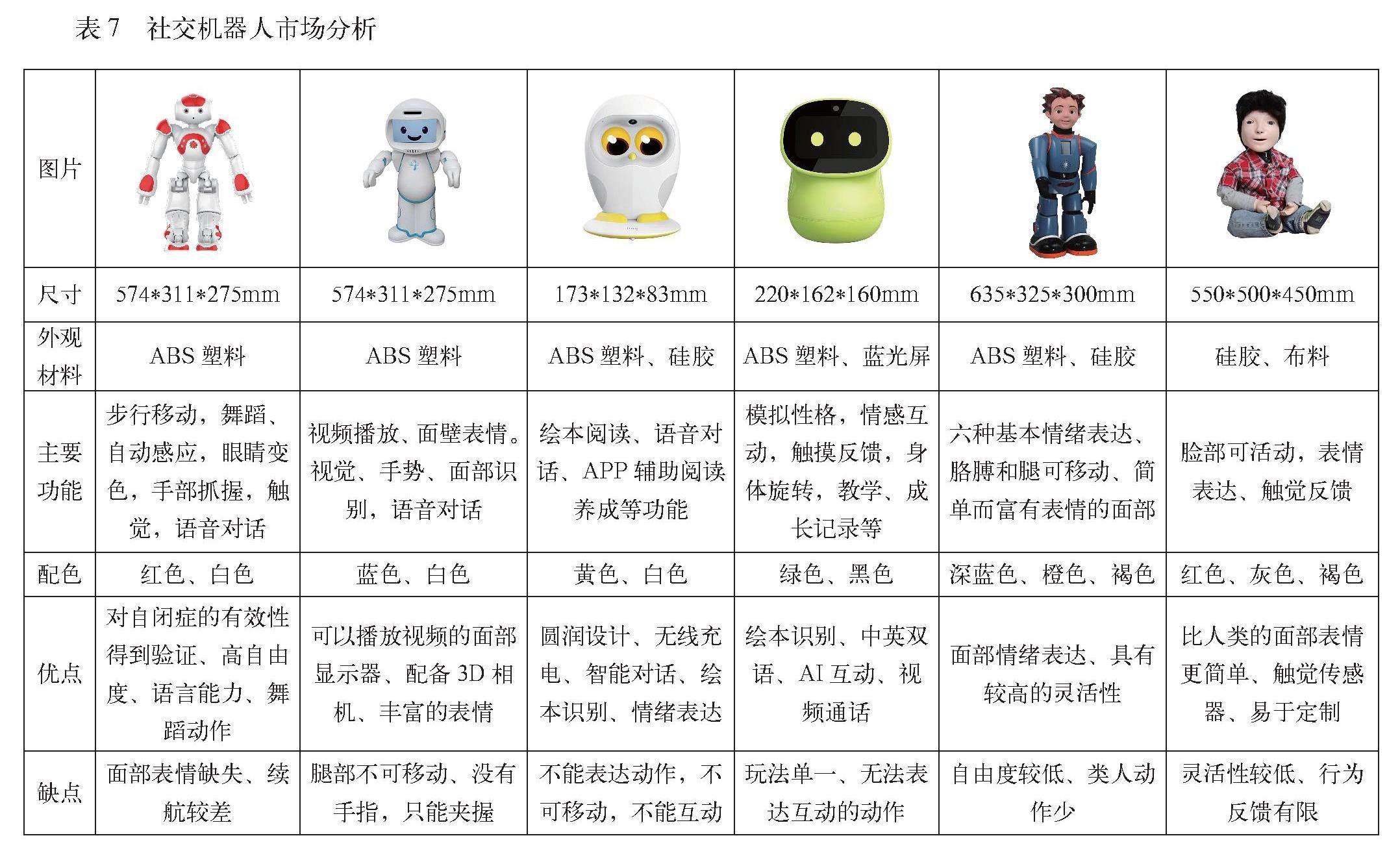
我们通过查阅电商网站以及国内外著名社交机器人品牌官网,对目前市场现状进行了分析,主要了解了主要竞品的尺寸、材料、功能、配色、优缺点等。目前市面上的专门为ASD儿童开发的社交机器人较少,因此我们也参考了普通儿童使用的社交机器人,具体内容如表7。
根据调研,我们发现大部分产品尺寸上控制在与儿童大小近似,可以更好地亲近儿童;材料上选择环保的ABS塑料作为外观,一方面可以实现复杂的造型,另一方面可以降低成本;功能上会装配有具备显示功能的电子屏,部分销量较好的产品,往往具备更强的自由度,可活动性更强,支持语音、触摸反馈等等多种功能;配色多以白色搭配较为鲜艳的颜色为主,选择儿童更喜欢的清新色彩,如蓝色、红色、绿色等。
三、自闭症儿童社交机器人设计原则
(一)基于Kano模型的功能设定原则
1.优化基本型需求:支持情感识别与表达,提供语言和沟通支持,给予明确、具体的提示和引导,是社交机器人的基本型需求,可以帮助儿童理解和执行互动任务,通过情感表达和语言与儿童建立情感连接,使其更好地理解和处理情感。
2.满足期望型需求:支持社交互动模拟,提供恰当的反馈和奖励机制以及个性功能的定制,是期望型需求,通过互动模拟可以教授儿童基本的社交规则和礼仪,在恰当的时间提供积极的反馈和奖励,可以增强他们的自信心,根据不同儿童不同的情况,可以提供个性化的干预。
3.提供兴奋型需求:在特定社交情境中提供指导,创造吸引人的游戏化人物和活动,是用户的兴奋型需求,会大大提升用户满意度,在情境中教导儿童与他人互动,可以帮助其适应不同的场景,游戏化的任务,激发其互动兴趣。
(二)基于PAD情感模型的造型设定原则
1.较高的愉悦度:愉悦度反映了被实验对象看到机器人样本材料后内心被激发的愉悦程度。当愉悦度较高时,用户往往心情放松,可以更好地完成任务。通过PAD问卷发现,具有较高愉悦度的往往是造型圆润的机器人,它们往往采用圆柱形、有机形、圆角矩形等组成整体造型,其圆润饱满的造型会降低ASD儿童的抵触情绪,满足了ASD儿童对于圆形元素的喜爱。此外面部特征简洁,与真人面部特征存在较大差距的机器人,也会带来较高的愉悦度。因此在设计机器人时,尽可能减少头部的造型特征,如几何型机器人,將头部与身体进行融合,采用较为圆润的几何造型,会带给ASD儿童更加放松的情感体验。或参考R6机器人,对头部造型做变形处理,变成横向的圆柱形,使其与真人有所区别,精简面部五官,让五官特征视觉特征减小,也可以带来高兴的情感体验。
2.适中的唤醒度:唤醒度反映了被实验对象看到机器人样本材料后内心被激活的兴奋程度。当用户处于一定激活或兴奋状态时,往往有利于注意力集中。但激活度不易过高,用户如果长期处于高度精神集中的状态,反而容易产生疲惫。因此一般在产品设计中,往往采用适中的正向的激活度,这样更有助于提高用户的体验。通过分析PAD情感数值,我们发现真人型机器人唤醒度过高,几何型唤醒度较低,说明拟人度过高会使ASD儿童感到紧张,为ASD儿童设计的机器人应当近似人,但不能过于复杂。
3.较好的优势度:优势度反映了被实验对象看到机器人样本材料后内心被控制的程度,往往代表产品对于用户是否可控。当优势度较高时,可以更加自如的操作使用产品,学习成本和认知负荷相应降低,也就不容易出现操作失误。真人型机器人优势度较低,说明容易让ASD儿童感到焦虑,而拥有抽象简化造型的几何型、动物型、类人型机器人都具有较好的优势度,在设计机器人要尽可能简化产品外形。
(三)基于市场调研的CMF设定原则
1.配色简洁
根据本文前期基于市场调研的CMF设计定位,考虑到ASD儿童视觉信息认知程度高,理解能力更强,对形状和颜色的识别较为敏感。不同配色对其识别性、喜好程度均有影响。通过了解目前市场需求,我们发现目前机器人产品大多采用鲜艳的颜色,搭配较为简洁干净的白色,使其具有一定的科技感,因此最终配色以饱和度适中的蓝色和粉色搭配白色,并提供不同的配色选择满足不同用户的需求。
2.材料环保
在材料选择方面,为了更好地满足机器人复杂的形体需求,采用环保ABS塑料最为最终产品,与儿童接触的机身部分采用硅胶材质,更好地保护儿童安全。
3.加工工艺成熟
材料成型方式可以选择注塑成型,可以实现产品的批量化生产,不同的材料零部件采用机械连接的方式,如采用螺钉、卡扣等。表面处理工艺采用环保的涂料,保证产品的绝缘、防水等功能,充分考虑可持续设计原则,进一步降低成本。
四、结论及展望
机器人不仅可以作为儿童的玩伴,还可以作为提供干预治疗的工具。随着机器人技术的愈加成熟,我们将机器人技术应用于ASD儿童的干预训练中将成为一种趋势。目前,机器人辅助干预已经应用于情绪行为,社交互动训练等多方面研究。未来,针对机器人干预效果的评估以及外形特征的研究将越来越多。但目前仍存在许多问题,有待我们进一步深入研究与拓展。本文研究过程中主要选取徐州的ASD儿童作为实验对象,后续希望能够引入更多样的ASD儿童个体建立更为完整的研究体系。在机器人类别的划分较少,后续希望拓展更为宽泛的机器人类别,以期对ASD儿童干预机器人的设计提供更为精准的方法和思路。
参考文献:
[1]杨俞玲,张丙辰,杨杰.基于视觉认知的ASD儿童干预APP导航界面设计研究[J].设计,2022(3):56-59.
[2]刘洁含,李甦.社交机器人辅助干预孤独症谱系障碍儿童研究进展[J].教育生物学杂志,2021(1):1-5,21.
[3]赵玉婉,张丙辰,李闯等.基于视觉偏好的自闭症儿童训练图卡设计研究[J].设计,2020(12):117-119.
[4]王永固,余成,黄碧玉等.社交机器人对ASD儿童社会互动行为的诱导效应[J].应用心理学,2019(2):131-139.
[5]侯婷婷,马春梅,张婷.自闭症谱系障碍个体的叙事评估与干预研究进展[J].中国特殊教育,2021(12):61-68.
[6]陈国强,姜楠,张鹏等.基于感性工学的儿童陪伴机器人造型设计[J].包装工程,2021(4):166-171.
[7]王艳群,杨俞玲,张仁杰等.基于眼动实验的ASD儿童陪伴机器人造型设计评价研究[J].包装工程,2022(20):121-131.
[8]Puglisi A,Caprì T,Pignolo L,et al.Social Humanoid Robots for Children with Autism Spectrum Disorders:A Review of Modalities,Indications,and Pitfalls[J].Children,2022(7): 953.
[9]Robins B,Dautenhahn K,Dubowski J.Does appearance matter in the interaction of children with autism with a humanoid robot?[J].Interaction Studies,2006(3):509-542.
[10]Cabibihan J J,Javed H,Jr M A,et al.Why Robots?A Survey on the Roles and Benefits of Social Robots in the Therapy of Children with Autism[J].International Journal of Social Robotics,2013(4).
[11]覃磊,楊勤,王嘉斌.基于KANO-AHP模型的工业设计服务平台创新设计研究[J].设计,2023(8):120-123.
[12]Mehrabian A.Pleasure-Arousal-Dominance:a General Framework for Describing and Measuring Individual Di-fferences in Temperament[J].Current Psychology (New Brunswick N J),1996(4):261-292.
[13]Bradley M M,Lang P J. Measuring emotion: the self-assessment manikin and the semantic differential[J].Journal of behavior therapy and experimental psychiatry,1994(1):49-59.
作者简介:
孙福旭,江苏师范大学机电工程学院研究生。研究方向:设计学。
张丙辰,江苏师范大学机电工程学院副教授。研究方向:设计学。
王瑞,江苏师范大学机电工程学院研究生。研究方向:设计学。
猜你喜欢
经济师(2017年4期)2017-07-05 16:13:18
经济师(2017年5期)2017-05-31 17:33:49
价值工程(2017年13期)2017-05-10 21:55:38
艺术与设计·理论(2016年12期)2017-01-13 07:10:42
未来英才(2016年19期)2017-01-04 13:49:53
建筑建材装饰(2016年11期)2016-12-29 18:08:59
艺术科技(2016年10期)2016-12-14 00:38:07
科教导刊·电子版(2016年26期)2016-11-21 09:04:43
考试周刊(2016年71期)2016-09-20 07:02:54
戏剧之家(2016年11期)2016-06-22 11:14:04