GNSS-R土壤水分反演研究进展
2024-05-08 06:08覃湘栋庞治国路京选
中国防汛抗旱 2024年4期
覃湘栋 庞治国 路京选 吕 娟
(1.中国水利水电科学研究院,北京 100038;2.水利部防洪抗旱减灾工程技术研究中心(水旱灾害防御中心),北京 100038)
0 引 言
土壤水分即土壤含水量,是土壤包气带中的水分含量。该参数向上控制蒸发影响气候变化,向下控制渗流影响水体分布,是水文、生物生态和生物地球化学过程中的关键变量。土壤水分的精准监测对于区域旱情评估和洪水预警也有着重要意义[1-3]。
土壤水分的主要观测方法有烘干称重[4]、频域反射仪[5]、宇宙射线中子仪[6]、探地雷达[7]、卫星遥感反演[8]及全球导航卫星系统反射测量(GNSS-R)[9]。烘干称重与频域反射仪对土体破坏性较大且测量范围有限,测量结果难以准确描述土壤水分的空间变化规律。宇宙射线中子仪和探地雷达在观测范围上较前两者有所增大,但由于设备布设与成本问题,在大规模土壤水分监测中应用受限。遥感反演是目前大尺度土壤水分观测的主要途径,研究也表明L 波段是土壤水分反演的最佳波段,但该方法也存在时空分辨率不足、反演精度低等问题。GNSS-R则采用双基雷达的形式获取地表反射信号以反演土壤水分,由于导航卫星采用L 波段电磁波,所以反射信号受大气、植被等因素影响较小,与土壤水分的相关性更强,加之GNSS-R 能够高频率接收卫星信号,极大提高了监测的时间分辨率,所以GNSS-R 是土壤水分观测的有效手段。
北斗卫星导航系统(BDS)是中国自主研制的全球卫星导航系统,除导航功能外,土壤水分等陆表水文要素监测也是北斗卫星业务应用的重要组成部分。目前,GNSS-R土壤水分反演研究仍处于起步阶段,有很多开放性的问题值得讨论,BDS 对该研究的影响也并不明确。为此,本文总结了GNSS-R 土壤水分监测平台及其应用范围,对反演方法进行了分类总结概括,并梳理了BDS在土壤水分监测中的应用研究,总结了北斗卫星数据在GNSS-R 土壤水分反演上的优势及影响。
1 观测平台
根据GNSS-R 接收机的位置,可以将GNSS-R 土壤水分监测分为地基观测、空基观测和星载观测(图1)。
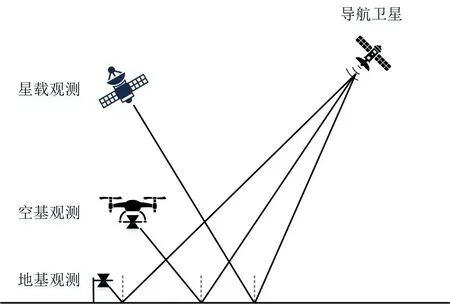
图1 GNSS-R土壤水分监测平台示意图
1.1 地基观测
地基观测是将GNSS-R 接收机安装在近地面设施上接收导航卫星的信号。根据信号接收机的接收模式不同,又可以分为单天线模式和多天线模式。单天线模式仅有一个用于普通导航定位的接收天线,通过该天线接收直射、反射、衍射信号叠加的多路径干涉信号信噪比,从而建立反射分量的振幅、相位、频率等特征参数与土壤水分的关系模型。多天线模式利用多个GNSS-R 接收天线分别接收直射和反射信号,由于天线数量较多,可获得更丰富、准确的反射信息,从而直接构建反射信号与土壤水分的关系模型。两种模式中,单天线模式仅适用于地基原位观测和低空飞行器观测[10],多天线模式则适用于3种观测平台,在实际观测应用研究中更为常见。
地基观测的特点:①由于接收机接收信号的菲涅尔反射区与其安装高度有关,所以地基观测的有效范围较小,一般在100 m以内;②由于接收机长期固定在某一位置,其观测区域是相对稳定的。综上,地基观测一般用于小范围土壤水分定点观测。
1.2 空基观测
空基观测是通过机载GNSS-R接收机接收导航卫星的信号。与地基观测一样,空基观测主要通过接收的地表反射信号解析土壤水分。由于无人机的应用推广,自2000年起,很多国家都开展了GNSS-R相关的飞行试验[11-12],并基于试验数据验证了机载GNSS-R信号反演土壤水分的能力。
相较于地基观测,空基观测中的接收机的位置更高,所以其观测的有效范围有所提升。其次,得益于无人机观测的灵活性,机载GNSS-R 可以自行选定感兴趣区开展土壤水分观测。综上,空基观测适合无观测站点区域的土壤水分调查。
1.3 星载观测
星载观测是将GNSS-R 接收机安装在低轨卫星上接收导航卫星的信号。由于导航卫星和低轨卫星处于相对运动状态,因此会产生多普勒频移,星载GNSS-R 的观测量是反射信号生成的时延-多普勒图(Delay-Doppler Map,DDM),而多数研究提取其峰值与土壤水分建立关系模型[13]。目前,星载GNSS-R已经开始用于全球土壤水分业务观测[14],搭载GNSS-R 接收机且用于土壤水分反演的卫星如表1 所示。由表1 可知,我国目前已具备星载GNSS-R 观测能力,但并未专门针对土壤水分设计观测任务;其次,我国携带GNSS-R 荷载的卫星数量较少,卫星观测的组网系统尚不完整,最终导致观测数据在时间分辨率上的不足。

表1 搭载GNSS-R接收机且用于土壤水分反演的卫星统计表
相较于前两者,星载GNSS-R 在观测范围和观测区域上明显拥有更大优势,更适合开展大范围土壤水分监测。但是也有一些局限性,由于接收机高度的提升,电信号的传播路径更长,受到更多不确定因素的影响,导致反射信号中噪声增大,影响土壤水分的解算难度和精度。所以目前研究仍需要针对传播过程开发更准确的模型与算法,解决星载GNSS-R土壤水分监测的精度问题。
2 GNSS-R土壤水分反演方法
土壤水分控制着土壤的介电常数,进而影响土壤的散射性质,这是GNSS-R 土壤水分反演的基本原理。但从GNSS-R 接收机获取的信号出发,各研究将其与土壤水分建立关系模型的途径却不尽相同。基于此,本研究将GNSS-R 土壤水分反演方法分为3 类:经验统计法、物理模型法和机器学习法。
2.1 经验统计法
经验统计法是基于反射数据与土壤水分间的统计关系构建反演模型。对于具体的函数形式,多数研究根据参数间的相关性分析结果主观判断选择,其中常用的函数形式如表2所示。

表2 经验统计法中常用的函数形式
经验统计法的主要优势在于计算简单及应用方便。但随着辐射传输过程模拟研究的深入,研究发现经验统计法的劣势是完全由数据驱动,这使得该方法在小区域上,由于地表异质性弱有良好的反演精度;在大区域上,由于植被、粗糙度、高程等环境参数的分布不均,固有函数形式并不能准确表达参数间的关系,最终影响反演结果的精度。
2.2 物理模型法
物理模型法是基于土壤水分影响地表反射率的物理机制构建反演模型。在该方法的反演流程中,多数研究从接收信号中的地表反射率出发,首先经过辐射传输模型和散射模型将地表反射率转换为菲涅尔反射系数,再经过菲涅尔方程将反射系数转化为土壤介电常数,最后经过介电混合模型将介电常数转化为土壤水分。在该方法中,常被选用的模型如表3所示。
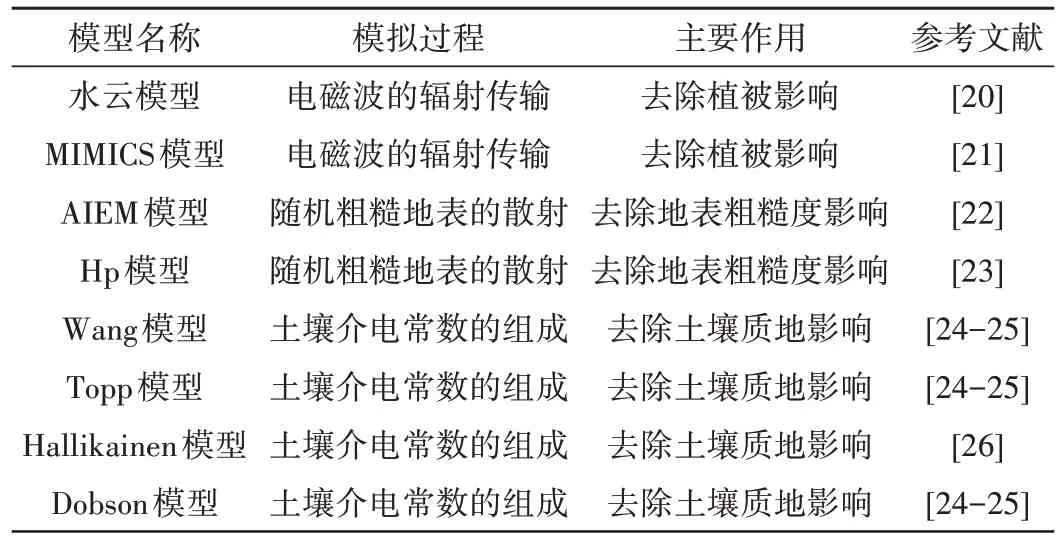
表3 物理模型法中的常用模型及其主要作用
物理模型法中,研究重点关注土壤水分对反射信号的影响机制,它能够很好地解释土壤水分与地表反射率数据间的异常分布,这也是物理模型法的主要优势。但是物理模型法也存在缺陷:①部分模型的输入参数较多,导致土壤水分求解难度较大;②每个模型都有一定的适用范围和自有误差,盲目的嵌套模型可能会造成反演误差的叠加,使得反演结果失真,影响反演的精度。
2.3 机器学习法
机器学习法是指引入机器学习等智能算法构建的反演模型。该方法执行较为简单,在确定机器学习算法后,只需要构建训练样本集进行迭代训练即可。目前常用的机器学习法如支持向量回归、随机森林、人工神经网络、极端梯度提升树等算法已被用于GNSS-R 土壤水分反演研究中(表4),相较于传统经验模型,机器学习算法充分发掘了参数间潜在的相关性,使得反演精度较大提升。同时,研究也进一步比较分析了输入参数和模型结构,讨论了输入参数的最佳组合及最佳机器学习算法[29-30]。

表4 机器学习算法在GNSS-R土壤水分反演研究中的应用
机器学习法能够模拟参数间任意非线性关系,这是其应用于GNSS-R 土壤水分反演研究的最大优势。其次,机器学习法避开了土壤水分对反射信号影响机制的追溯,使得其不需要考虑反演过程中产生的中间变量准确性,仅以土壤水分反演结果的精度为最终目标。但是,这也使得该类方法的可解释性较弱,输入、输出变量间的转换关系隐藏在巨量的模型参数中,无法开展相关因素的影响机制分析;此外,机器学习法是基于数据驱动,反演结果的精度很大程度取决于训练样本集的质量。
3 BDS在GNSS-R土壤水分反演中的应用
BDS 是中国自行研制的全球卫星导航系统,也是继美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后的第3 个成熟的全球卫星导航系统。早期的GNSS-R 土壤水分反演研究主要使用的是GPS 的卫星信号,北斗卫星导航系统建成后,为反演研究提供了更丰富的数据源和更广阔的反演思路[32-35]。张楠等[36]就使用北斗地球静止轨道卫星信号基于物理模型法反演土壤水分,印证北斗卫星信号准确性的同时,也阐明了地球静止轨道卫星信号在GNSS-R 土壤水分反演上的优势。在此基础上,很多研究针对地球静止轨道卫星开发特定的反演模型与方法,如杨磊等[37]提出了一种支持向量回归辅助的北斗地球静止轨道卫星反射信号土壤水分反演方法,杨昌智[38]基于北斗C3 和C59 两颗地球静止轨道卫星的信号提出不同的单星反演模型。同时,研究也逐渐发现基于单颗卫星的单个频段信号开展土壤水分反演的缺陷,表现在缺乏其他频段、其他卫星的信号做信息补充的情况下,反演结果的稳定性和准确性会受到影响[32]。而BDS 具备多个频段的信号传输能力,多频段信号意味着更丰富的土壤水分信息,所以部分研究从信息熵的角度融合GNSS 反射信号中不同频段信号所含的土壤信息,构建了单天线模式下北斗系统基于单星双频段熵融合的土壤水分反演模型[39]。
由此可以看出,BDS 是全球导航卫星系统的重要组成部分,为GNSS-R 土壤水分反演提供了丰富的数据源。从相关研究中可以发现,BDS 在GNSS-R 土壤水分反演中有其独特优势:①BDS 中特有的地球静止轨道卫星,由于固定的卫星高度和几何关系,使得GNSS-R 接收机能够获得高质量的多路径误差信息,而将其应用于土壤水分反演时,不仅能有效减少反演过程中的运算量,还能够提高反演结果的准确性;②BDS 具备多个频段信号的传输能力,这意味着接收机能够获取丰富的地表反射信息,有利于提升GNSS-R土壤水分反演结果的稳定性与准确性。
4 结 语
土壤水分是一个重要的地表参数,而GNSS-R 技术是土壤水分监测的有效手段。BDS 是全球导航卫星系统的重要组成,对GNSS-R 土壤水分反演研究有巨大贡献。为了使研究者对其有所了解,本文首先总结了目前GNSS-R 技术进行土壤水分反演研究的观测平台及其使用场景,而后分类概括了GNSS-R 土壤水分反演方法研究,分析各种方法的优势和劣势,最后对BDS 在GNSS-R 土壤水分反演中的应用进行了概述,总结出BDS 对GNSS-R 土壤水分反演研究的主要贡献和其优势。本研究为GNSS-R 土壤水分反演方法的开发和观测任务卫星的设计提供了有价值的参考。
猜你喜欢
中等数学(2022年5期)2022-08-29
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
石油地球物理勘探(2017年4期)2017-12-18
石油地球物理勘探(2017年2期)2017-11-23
高原山地气象研究(2016年2期)2016-11-10
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
长江大学学报(自科版)(2014年2期)2014-03-20
塔里木大学学报(2014年3期)2014-03-11