
基于数字孪生技术的变电站巡检路径冲突检测研究
2024-05-06 08:11:28郭江涛王涛贾俊强买合布拜肖开提刘璐璐
电子设计工程 2024年9期
郭江涛,王涛,贾俊强,买合布拜·肖开提,刘璐璐
(国网新疆电力有限公司信息通信公司,新疆乌鲁木齐 830000)
随着工业产业的发展,安全稳定的供电已经成为了企业发展和社会生活的基本保障。变电站是整个电力系统传输和供电的集结站,负责将电力汇集、交流和调配。由于变电站直接暴露于自然环境中,除电力设备运转带来的机械损耗和电力损耗外,还经受阳光、雨水等自然侵蚀,这些因素会加速电气设备的老化,如果没有及时发现故障进行下井处理,极有可能导致电气设备出现突发性故障,对整个电力系统的稳定性和安全性构成重大威胁。为了避免出现这种现象,在平时就有必要对变电站进行定期或不定期的巡检。
对于巡检路径的冲突检测可以有效提升巡检的效率,因此,一些学者针对变电站巡检路径规划进行了研究。文献[1]提出面向变电站机器人巡检路线规划中的计算研究,依据离散数学原理中的哈密顿回路结合路径常规计算,研究了一种全局巡检方法,但该方法在极端情况下无法运作,不能完成路径规划。文献[2]分析了特高压变电站巡检机器人路径规划改进的蚁群计算,将蚁群计算和人工势场计算融合,大大提高了蚁群计算的搜索能力,构建仿真环境完成路径规划。但该方法过度依赖智能机器人,人工无法操作。
该文在数字孪生的基础上对变电站巡检路径冲突检测进行优化。数码孪生技术包含了三种要素,即真实空间、虚拟空间和二者之间的数据信息流。
1 巡检路径数据采集
该文采用倾斜摄影技术采集巡检路径数据,使用搭载具有倾斜角度的航拍器采集目标的全方位信息,解决信息缺失问题。基于倾斜摄影的数据采集过程如图1 所示。

图1 基于倾斜摄影的数据采集过程
根据图1 可知,采集方法核心步骤主要分为四步:影像采集、多视影像平差、多视影像密集匹配、纹理映射。
1.1 巡检影像采集
影像数据采集工作主要分为测区观察、测区路线规划、测量计划的制定与实施、数据的导出与合成[3-4]。
测区观察:测区观察的主要目的是观察待测区面积的大小以及待测区内建筑的最大高度。根据这些信息来制定数据采集时航拍器的航高航线和制定测量计划。
测区路径规划:对测区路径的规划,须充分考虑被测区的地理环境、模型的生成精度等影像因素,以便于选取较为理想的路径重合度和旁向重合度、测量高度,以确保可以采集到高质量的影像数据。由经验可得,飞行高度设置为高出待测区内最高建筑物的30%左右,旁向重合度和航向重合度设置在65%~85%左右,航拍器的拍摄模式设置为等间距拍摄[5-6]。
测量计划的制定与实施:测量时间尽量选择在晴天的中午12 点之前的3 个小时和下午两点钟之后的3 个小时,保证光照充足的同时还需要防止过度的强光照射对影像数据采集的影响[7-8]。
数据的导出与合成:在航拍器完成测量后,将其中影像数据拷贝出来,由于高空气流、气压等影响,会造成航拍器不稳定,导致采集的照片角度变化大,并且受空气质量和光照条件的变化等因素的影响,不同时刻所获得的倾斜影像在亮度、对比度等属性有所差异。为了消除影响,需要对所获得的影像照片进行色彩修正和光色均匀处理,并删除缺陷严重的影像。在处理之后需要将对应的POS 数据一并删除,保证影像信息与POS 数据一一对应[9-10]。
1.2 多视影像平差的计算与密集匹配
基于采集的巡检影像,使用光束法计算多视影像的平差,摄影测量的基本原理为共线方程,共线方程模型为:
式中,x、y为平面坐标值,x0、y0、f为影像方位元素,Xa1~Xa4为测量物坐标;Xs为样本阈值,以共线方程为基础,将其进行泰勒展开,得到多视影响的平差。
将最小二乘的计算应用在多视图像中,其具有共线条件的多视图像匹配计算。根据核线的几何位置条件,在核线图像上进行一维空间搜索,通过灰度观测方程求出测量物的图像位置[11-12]。通过计算多个相机拍摄的同一地点的图像坐标来确定像点坐标,利用核线约束的最小二乘匹配计算后得到搜索图像相应的地面坐标。
2 巡检路径冲突检测
完成数据采集后,便可进行基于数字孪生技术的巡检路径冲突检测,通过数字孪生的虚拟空间运行巡检设备[13-14],对巡检设备可能的运动变换进行分析,在数字孪生技术的虚拟空间中,所有动作变化都可以转换为对称、平移、旋转,因此可以建立三维线性变换矩阵来表示巡检的比例变换、对称变换、旋转变换[15]。
空间坐标的变换模式如图2 所示。
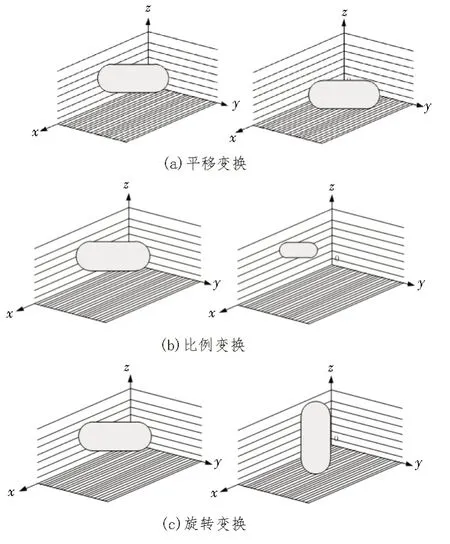
图2 变换模式
三维空间的坐标转换可分为平移变换、比例变换以及旋转变换三种形式,对于平移变换主要应用的是布尔莎模型,坐标的比例变换即为坐标按照规定系数的变换,旋转变换是通过一定角度完成坐标的转换。三种坐标转换形式的表达式为:
①平移变换:模型物体A在真实空间的坐标沿一定距离平移到虚拟空间中,物体的大小形状不发生改变,布尔莎坐标平移转换模型为:
式中,(XA,YA,ZA)为原始坐标,为平移后的坐标;TA为平移参数;(ωx,ωy,ωz)为不同坐标的平移参数。
②比例变换:物体在真实空间的体积过大或过小,在转移到虚拟空间时需要将其放大或缩小,其坐标比例变换表示为:
③旋转变换:三维物体围绕某一个坐标轴从真实空间转移到虚拟空间时,旋转角度为θ,其矩阵表示为:
为了更好地展现数字孪生中虚拟空间与真实世界的高度一致性,该文在建立虚拟世界中的每一个物体添加冲突单元,并将刚体一起添加到物体上,来模拟物理世界中的冲突效果,更大程度地还原现实世界中的物理规则,避免发生不符合常理的物体间相互穿透的物理现象的出现。在进行冲突检测时需要,每一个对象都使用一个比模型稍大的几何体包裹,从几何角度出发检测场景中的物体是否发生接触,检测完成之后返回冲突信息[16]。其检测算法原理如下:
假设χ1、χ2、χ3和χ4表示虚拟物体周围N、S、E、W四个方向距离障碍物的长度值,且设定min(χ1,χ2,χ3,χ4) 是可求的,以R为半径的圆形区域是虚拟物体行动安全范围,假定R′为虚拟物体包围盒子的探测半径,则物体在不同方向上是否会发生冲突的判断公式可表示为:
通过在数字孪生虚拟空间中进行式(5)的距离计算来完成巡检路径冲突检测。
3 实验研究
为验证该文提出的基于数字孪生技术的变电站巡检路径冲突检测优化方法的实际应用效果,设定对比实验。通过建模软件Autobesk 3ds max(3DMAX)根据图片素材对现场设备一比一还原现场实时情况,包括运动过程,运动轨迹,建好的模型导入Quixel SUITEL 里面做材质贴图,如模型需要从高模转低模则需要通过拓补软件TopoGun 转成低模,然后再用烘焙软件marmoset toolbag 把高模的模型细节转移到低模。以上操作完成后,则转出OBJ 格式导入3DMAX 中添加贴图,设立实验,进行冲突检测,通过冲突检测过程实现巡检路径优化,3DMAX 图如图3 所示。

图3 3DMAX图
利用航拍器倾斜摄影技术采集巡检场所中物体的三维图像,对采集到的图像进行预处理,去滤波去噪,通过建立共线方程模型计算多视影像平差,进行多视影响密集匹配,获得场景视差图,利用相机参数对视差图进行换算,得出巡检场所深度信息。利用人工势场标记障碍物,规划出避开障碍物的巡检路线,进而获得障碍物三维坐标,进行巡检路径冲突检测。
选用该文提出的基于数字孪生技术的变电站巡检路径冲突检测优化方法、文献[1]方法和文献[2]方法完成后对比测试。不同方法的路径冲突检测误差如表1 所示。

表1 路径冲突检测误差实验结果
根据表1 可知,文中方法巡检能力更强,路径冲突检测误差始终小于等于0.05%,传统的基于蚁群算法的方法虽然也具备一定的消除路径冲突检测误差能力,但是其路径冲突检测误差高于该文方法,相比之下,文中方法具有显著的应用优势。
基于上述测试结果,进一步对不同方法下巡检延时时间进行检验,检验次数共5 次,得到的实验结果如表2 所示。
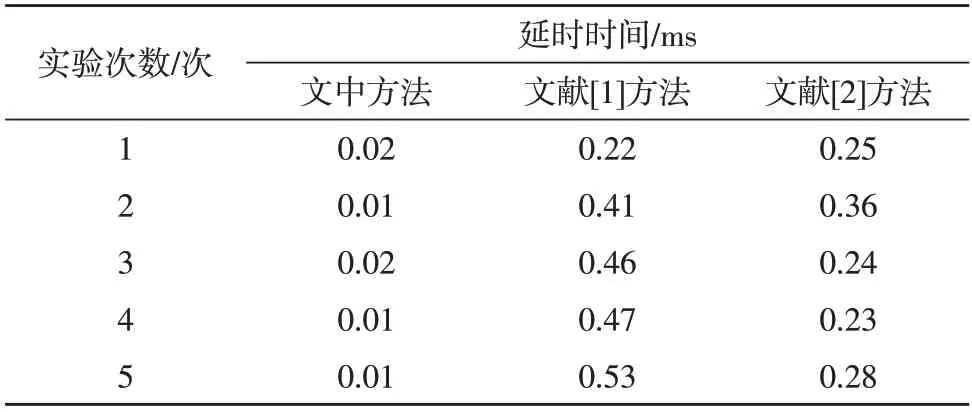
表2 巡检延时时间检测结果
在经过该文方法优化后,延时时间低于0.02 ms,而未进行优化之前,延时时间始终在0.6 ms 之内,无法满足用户要求。由此可见,该文提出的基于数字孪生技术的变电站巡检路径冲突检测优化方法优化能力最强,更适合于实际应用。
4 结束语
变电站的安全问题已然成为了电力领域的重点问题,对于变电站巡检路径的冲突检测以及优化可以极大提高变电站的稳定性。该文提出了基于数字孪生技术的变电站巡检路径冲突检测优化方法,通过数字孪生技术对信息进行分析,解决了传统方法的不足,并为后续研究此方面的学者提供相关参考。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
现代电影技术(2022年1期)2022-02-15 08:12:28
自动化与仪表(2021年10期)2021-10-26 07:44:12
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
科教导刊·电子版(2017年22期)2017-09-20 11:03:18
电脑知识与技术(2017年12期)2017-07-29 15:51:25
科技与创新(2017年8期)2017-06-07 20:40:47
雪莲(2015年8期)2015-11-28 19:34:33
