
基于自适应扰动和改进趋近律的永磁同步电机滑模调速系统
2024-04-30 00:55李旭阳黎晓曦朱其新朱永红
机床与液压 2024年6期
李旭阳,黎晓曦,朱其新,3,朱永红
(1.苏州科技大学机械工程学院,江苏苏州 215009;2.贵阳卷烟厂,贵州贵阳 550003;3.苏州市共融机器人技术重点实验室,江苏苏州 215009;4.景德镇陶瓷大学机电工程学院,江西景德镇 333001)
0 前言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因具有效率高、能耗低、功率密度高、转矩大、噪声小及可靠性高等多重优势[1-2],而被广泛应用于风力发电、轨道交通、工业机床各个领域。传统的PI控制作为一种经典控制策略,因其算法简单、稳定可靠而在工业控制领域受到广泛应用,但因PMSM是一个非线性、强耦合、参数可能随时间变化的复杂系统,PI抗干扰能力不足,难以满足对高精度机床PMSM控制的要求[3]。因此,滑模变结构控制、自适应控制、智能控制算法等新型控制算法[4-7]开始被应用于PMSM的控制。其中滑模变结构控制因响应速度快、抗扰动能力强等优点,被众多学者研究并应用到PMSM控制中。然而,传统的滑模控制存在一个严重的问题,即当系统状态到达滑模面后,会产生对系统不利的超调和抖振[8],这些不稳定现象会降低系统的跟踪精度和动态性能[9]。为了抑制系统的抖振,学者们提出了多种方法,陈才等人[10]基于传统指数趋近律,引入了变指数函数和终端吸引子,提高了系统趋近速度和抖动抑制能力。苗敬利等[11]提出了一种改进的幂次指数趋近律,同时将模糊算法和自适应滑模控制结合起来,用模糊自适应方法优化了趋近律中的未知参数。王要强等[12]在幂次趋近律的基础上加入指数项,并且在幂次指数项的指数中引入状态变量,加快了系统远离滑模面时的趋近速度,同时使系统更加平滑以进入滑模面。
此外,实际PMSM控制系统中还存在很多干扰和非线性摩擦,对扰动的估计和补偿也是非常重要的一环[13]。控制系统的扰动估计有很多方式,其中自适应算法因能自动补偿扰动、所需假定条件少、鲁棒性高等优点,获得了一众学者的青睐。王婷婷[14]对控制律中符号函数的增益进行了自适应调节,有效地控制了滑模面的抖振问题。孙哲等人[15]则对滑模面参数增益的大小进行了自适应控制,同样增强了系统的鲁棒性。郭一军[16]采用了扩张状态观测器进行扰动估计。
本文作者首先选用积分终端滑模面,积分终端滑模面与传统滑模面相比,不仅可以抑制抖振现象,还可以缩短收敛时间[17-19];其次,设计一种新型趋近律,将系统状态参数引入了趋近律内,借助参数随系统状态变化的特性,并在此基础上改进趋近律内的数学关系式,增强趋近律的自适应调节能力;最后,采用李雅普诺夫判据对负载扰动进行自适应估计。
1 三相永磁同步电机数学模型
为了便于分析,假定永磁同步电机为理想状态,并作以下假设:永磁体的磁动势固定不变,电机反电势为正弦形式,电机转子上无阻尼绕组;电机感应电动势和气隙磁场都按正弦分布,且不考虑磁场的所有谐波;三相定子绕组在定子空间中呈对称分布,三相绕组中的各个电枢电阻及电感均相等;不考虑电机铁芯的永磁饱和、电机中的涡流损耗、电机周围环境温度对电机的影响以及电机黏滞摩擦系数[20]。
文中选择id=0的矢量控制方式,在d-q坐标系下进行研究。永磁同步电机的模型为
(1)
永磁同步电机转矩方程为
TE=1.5Pnψfiq
(2)
在不考虑黏滞摩擦系数的情况下,永磁同步电机的运动方程如下:
式中:id、iq分别为定子电流d、q轴分量;ud、uq分别为定子电压d、q轴分量;Rs为定子电阻;Ld、Lq分别为定子d、q轴电感;ω为电机实际转速;Pn为电机极对数;ψf为永磁体与定子交链磁链;TE为电磁转矩;TL为负载转矩;J为转动惯量。
2 自适应积分终端滑模控制器设计
令e为期望转速和实际转速的差值,设式(3):
(3)
滑模控制器设计主要分为2个阶段:首先是滑模面的设计;然后是趋近律的设计。滑模面的设计是针对滑模面趋向于零点的过程,而趋近律设计主要针对的是系统从无穷远处趋近于滑模面的过程。
滑模面也称切换函数,它决定了滑动模态的稳定性和动态性能。常见的滑模面有线性滑模面、积分滑模面、终端滑模面和高阶滑模面等。文中采用了积分终端滑模面,相比传统滑模面其收敛速度更快,抑制抖振的能力更好,而且求导以后无二阶导数,增加了控制器的稳定性。
因此,文中滑模面基本形式定义为
(4)
其中:q>p>0,且q、p都是奇数;λ为终端吸引子;c为积分项系数。
对滑模面求导得:
(5)
将式(2)代入式(5)中可得:
(6)
设
(7)

联立式(6)(7)得到控制量iq的数学表达式为
(8)
文中设计的趋近律如下:
(9)

将式(9)代入式(8)中,得控制律为
iq=
(10)
选取Lyapunov函数
(11)
(12)
为了使系统满足李雅普诺夫稳定性判据,定义扰动估计的自适应律如下:
(13)
将式(13)代入式(12)中,可得
(14)

文中最终控制律iq的表达式如(15)所示:
iq=
(15)
3 仿真与结果分析
为了验证文中所设计新型滑模控制器的控制性能,在MATLAB/Simulink环境下进行仿真。同时,构建一个传统滑模控制系统作为对比,此滑模控制采用式(16)的积分滑模面和改进后的指数趋近律,是目前广泛运用的滑模控制方法。
(16)
其中:n1>0,n2>0。则对比滑模的控制律iqD如式(17)所示:
(17)
2个系统中的电机参数皆相同,采用的参数见表1。设定期望转速都为1 000 r/min,在1~3 s时加入50 N·m的负载扰动,通过仿真得出不同系统控制下的电机转速波动,由此对比2个不同系统的综合性能。
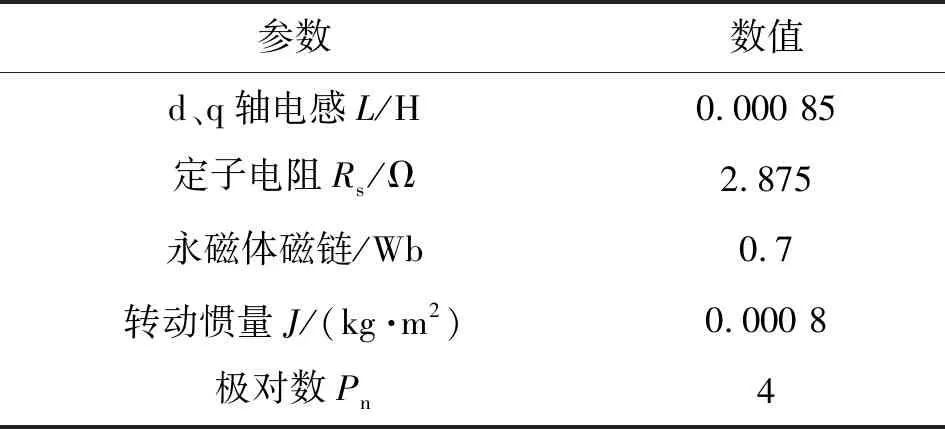
表1 永磁同步电机运行参数
PMSM调速系统的整体结构框图,如图1所示。

图1 永磁同步电机仿真结构框图
电机在空载启动时的仿真曲线对比如图2所示。
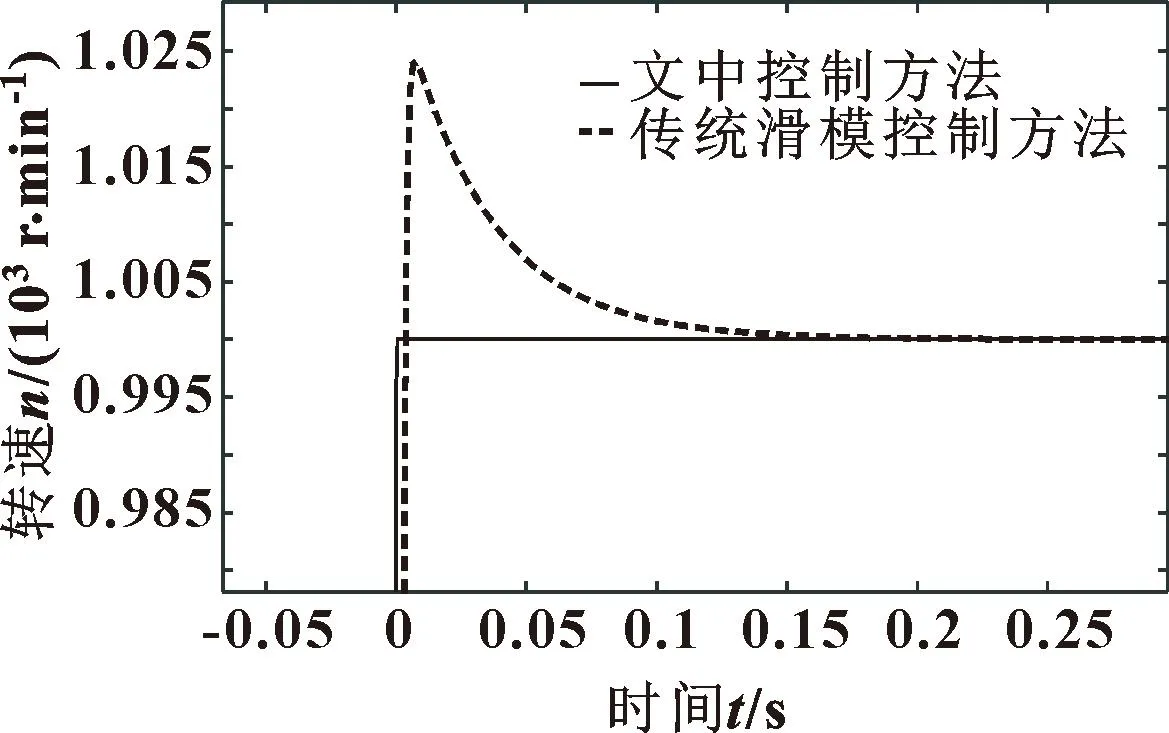
图2 两种控制策略下初段转速响应对比
在期望转速为1 000 r/min的启动过程中,传统滑模控制的启动响应速度略慢,超调量较大(约为2.4%),调节时间也较长。而采用新型趋近律的滑模控制,除了启动速度更快,调节时间也更短,电机启动过程中几乎没有超调量。因此,文中控制策略在电机启动阶段的综合性能更强。
图3所示为1 s时加入50 N·m负载转矩后系统转速的对比。
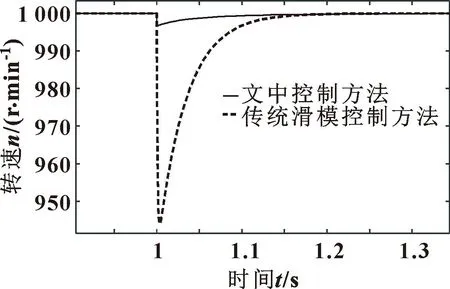
图3 两种控制策略加入负载扰动后的稳定性对比

图4 两种控制策略撤销负载扰动后的稳定性对比
由图3可知:传统指数趋近律的滑模控制策略中,加入50 N·m负载转矩后,电机转速动态降落约为5.6%,恢复时间约为0.11 s;而在文中新型自适应扰动滑模控制策略下,电机转速动态降落约为0.3%,恢复时间约为0.04 s。
相比传统滑模控制策略,文中控制策略下的电机受扰动的影响小得多,而且回复速度更快、稳态精度更高。
图5所示为3 s时撤销负载转矩,系统转速的对比。
同理,撤销负载扰动后,文中控制策略下的电机转速波动更小,恢复到期望转速的时间更短,稳定转速的能力更强。
相比传统滑模控制策略,文中控制策略不仅在系统初段响应更迅速、超调量和抖振更小,在受扰动阶段电机的转速波动也小得多,并且有更快的恢复速度和更高的稳态精度。综上,文中控制方法的综合性能更强。
4 结论
文中以永磁同步电机为对象,以滑模算法和自适应扰动为基础,设计了一种新型的转速滑模控制器。在趋近律的选取方面,综合比较了几种常见趋近律的优缺点,改进了传统趋近律的数学关系,结合初始响应阶段系统状态变量的特点提出了一种新型趋近律,使得系统初段的响应速度更快,抖振和超调也更小。同时,为了提升系统的抗扰能力,使用自适应的方法估计扰动,并将估计值代入滑模算法中,合力提升控制系统的性能。仿真结果表明:相比传统指数趋近率的调速方式,采用文中控制策略的PMSM调速系统的响应速度更快、抗扰性能更好。
猜你喜欢
防爆电机(2020年6期)2020-12-14
科学技术创新(2020年3期)2020-03-24
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
韶关学院学报(2018年6期)2018-07-21
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
锻造与冲压(2016年22期)2016-06-21
大电机技术(2015年5期)2015-02-27
