
光电稳定平台的模型修正自抗扰控制
2024-04-29 05:49熊东海
组合机床与自动化加工技术 2024年4期
熊东海
(惠州城市职业学院智能制造学院,惠州 516000)
0 引言
光电稳定平台主要用于承载高精度的光电探测设备,不仅要求对运动目标进行准确跟踪,还要对载体运动具有很强的隔离能力,被广泛应用于地质测绘、航空侦查、武器系统等领域[1]。影响光电稳定平台稳定精度的主要因素包括摩擦力矩扰动、质量不平衡力矩扰动以及载体姿态变化等,另外由于光电稳定平台多采用力矩电机直接驱动,各种扰动对系统的影响将更为明显。因此,伺服系统中对各种扰动作用的抑制效果,决定了光电稳定平台最终的稳定精度[2]。
目前,针对光电稳定平台的扰动抑制问题,传统控制策略采用“被控抗扰”的思想,由于受到机械谐振频率的限制,导致无法提高系统的开环剪切频率,难以从本质上提升平台的稳定精度[3]。为此,一些现代控制理论方法被研究用于光电稳定平台的稳定和扰动控制,如自适应控制[4]、终端滑膜控制[5]以及神经网路控制[6]等。然而这些方法往往依赖精确的被控对象数学模型,且算法设计困难,不适合在光电稳定平台中进行推广和应用[7]。
相比之下,自抗扰控制(active disturbance rejection control,ADRC)策略[8]基于“主动抗扰”的思想,通过对总扰动主动估计和实时补偿,使系统具有很强的扰动抑制能力。近年来,自抗扰控制技术被众多学者研究用于光电稳定平台的伺服系统控制。周涛[9]提出利用自抗扰来补偿光电稳定平台的结构谐振,改善了平台的稳定精度。李贤涛等[10]提出一种基于扰动频率自适应的自抗扰控制方法,进一步提高了光电稳定平台对于不同频率扰动的抑制能力。魏伟等[11]提出基于重复控制和自抗扰控制的复合超前控制方法,改善了光电稳定平台的速度稳定性和跟踪精度。方宇超等[12]将降阶自抗扰控制与卡尔曼滤波器相结合,提高了系统扰动隔离性能。王春阳等[13]分别设计了基于模型辅助的模型自抗扰控制方法和降阶自抗扰控制方法,提高了光电稳定平台的扰动抑制能力。如何在自抗扰控制系统中充分有效地利用辨识得到的模型信息,成为进一步提升光电稳定平台控制性能的关键。
本文以某两轴两框架光电稳定平台为研究对象,提出一种模型修正自抗扰控制方法。在传统自抗扰控制方法的基础上,设计融合模型信息的模型扩张状态观测器,对包括总扰动在内的系统状态进行准确估计,并通过总扰动补偿将光电稳定平台的被控模型修正为准确的辨识模型形式。基于辨识模型设计误差反馈控制器,以实现光电稳定平台的稳定控制。
1 光电稳定平台的建模与扰动分析
1.1 光电稳定平台的数学模型
光电稳定平台伺服系统主要由载体、直驱力矩电机、陀螺仪速度传感器、光电探测设备以及框架结构等部分组成。以某型两轴两框架的光电稳定平台为研究对象,其平台结构如图1所示。由于平台方位轴和俯仰轴在空间上正交,可以忽略两轴间的耦合作用,且两轴伺服控制结构基本相同,故本文着重研究光电稳定平台单轴的速度闭环控制。
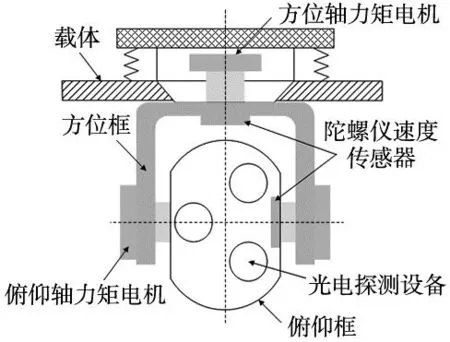
图1 光电稳定平台的结构图
力矩电机和平台负载之间近似为刚性连接,忽略阻尼和弹性效应,建立电势平衡方程:
(1)
式中:u、i、R和L分别为电枢电压、电流、电阻和电感,Ke为反电动势系数,w为力矩电机轴的速度。力矩平衡方程为:
(2)
式中:Tm、Ta和Td分别为力矩电机和平台负载的总惯性力矩、电机电磁力矩和摩擦力矩扰动,J为力矩电机与平台负载的总转动惯量,Cm为电磁力矩系数,Fm为摩擦力矩系数。对式(1)和式(2)进行拉式变换,得到电压到电机速度的传递函数为:
(3)
由速度控制器计算得到控制信号,经PWM功率放大电路驱动力矩电机转动。忽略PWM功率放大器传输信号的滞后,其模型可简化为:
GPWM(s)=KPWM
式中:KPWM为放大系数。陀螺仪用来测量平台负载在惯性空间的速度,其模型一般近似为二阶振荡环节:
(4)
式中:Kg为陀螺仪增益系数,ξ为陀螺仪阻尼系数,wn为陀螺仪固有频率。由于wn较大,陀螺仪可视为一个比例环节,即Gg(s)=Kg。结合以上模型环节,得到平台单轴的速度闭环控制结构,如图2所示。
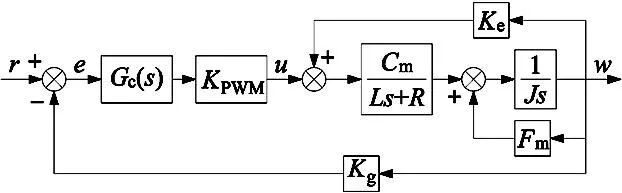
图2 速度闭环控制的结构框图
图2中,r为目标速度,e为速度误差,Gc(s)为速度控制器模型。于是,可用一个二阶传递函数模型对光电稳定平台单轴进行描述:
(5)

1.2 光电稳定平台的扰动分析
除了摩擦力矩扰动以外,影响光电稳定平台稳定精度的扰动还包括质量不平衡力矩扰动、风阻力矩扰动以及载体速度扰动。其中,摩擦力扰动、质量不平衡力矩扰动和风阻力矩扰动可以统一为力矩扰动T1,作用在平台系统的输入通道上;载体对平台的速度扰动T2作用在平台系统的输出通道上。如图3所示。

图3 平台扰动的作用原理图
拉氏变换下的力矩电机轴速度为:
w(s)=G(s)(u(s)+T1(s))
(6)
考虑速度扰动,得到平台最终输出的速度为:
y(s)=w(s)+T2(s)=G(s)[u(s)+Tt(s)]
(7)
式中:Tt(s)为等效力矩总扰动,有Tt(s)=T1(s)+G-1(s)T2(s)。于是,平台单轴速度闭环控制的等效结构如图4所示。
其闭环传递函数为:
(8)
式中:y1(s)为零扰动下的系统输出,越接近r(s)表明系统的跟踪性能越好;y2(s)为零输入下的扰动输出,越小表明系统的干扰抑制能力越强。基于经典PID的控制方法设计速度控制器,虽然能够利用积分环节减小扰动引起的静态误差,提高速度跟踪精度,但是难以抑制扰动对输出速度的动态影响。
2 模型修正自抗扰控制
2.1 光电稳定平台的被控模型
由式(5)和式(7)可得光电稳定平台单轴的系统微分方程为:
(9)
(10)
(11)
2.2 模型修正自抗扰控制系统设计
在对光电稳定平台伺服系统进行辨识的基础上,本文提出一种模型修正自抗扰控制(MMADRC)方法,包括融合模型信息的模型扩张状态观测器(MESO)、总扰动补偿律(TDCL)和误差反馈控制器(EFC),其控制结构如图5所示。
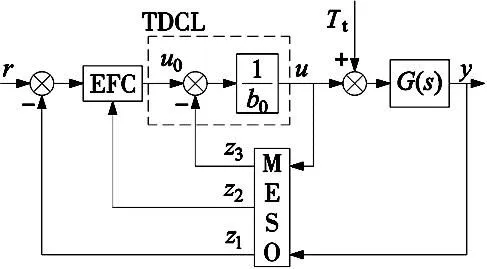
图5 MMADRC的闭环结构图
根据式(11)建立MESO的数学模型,即:
(12)
式中:L=[l1l2l3]T为观测器增益参数,Z=[z1z2z3]T为对系统状态X的估计输出。选择合适的L,能够使Z较好地估计X。定义观测误差:ε=X-Z。由式(11)和式(12)得到观测误差的状态空间方程为:
(13)

(14)
式中:wo为观测器带宽。wo越大,MESO对系统各阶状态的估计响应越快,但是过大的wo会引入高频噪声干扰,不利于闭环系统的稳定。设计TDCL,对总扰动进行补偿,并计算得到最终的控制电压:
u=-z3/b0+u0
(15)
式中:u0为EFC输出的初始控制量。当MESO输出的z3能够准确估计系统总扰动f时,即z3=f,结合式(10)和式(15)有:
(16)
其传递函数形式为:
(17)
于是,不同于传统ADRC将被控对象模型改造成积分串联标准型,本文所提方法通过MESO和TDCL将光电稳定平台伺服系统模型修正为准确已知的辨识模型形式。因此,MMADRC通过对总扰动的主动估计和实时补偿不仅已经消除了等效力矩扰动对输出速度的影响,而且修正后的辨识模型包含了比积分串联标准型更多的模型参数信息。根据辨识模型设计EFC来保证目标指令的跟踪性能,其表达式为:
(18)
式中:kp、ki和kd为控制器增益参数。于是,式(18)可改写为:
(19)

(20)


(21)

2.3 模型修正自抗扰控制的频域分析
通过模型辨识得到该光电稳定平台方位轴的辨识模型为:
(22)

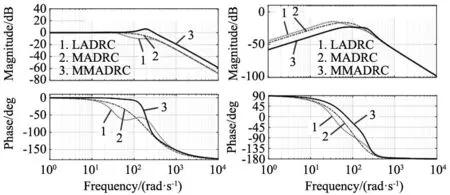
(a) 闭环通道 (b) 扰动通道
由图6a可知,在相同的控制参数下,伺服系统的闭环带宽:MMADRC>MADRC>LADRC,其跟踪响应速度:MMADRC>MADRC>LADRC。由图6b可知,MMADRC对扰动的抑制速度更快,其次是MADRC,而LADRC的扰动抑制性能最差。

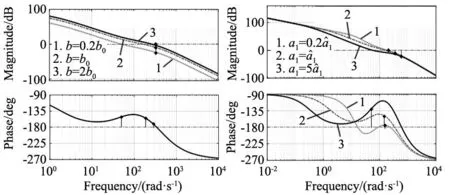
(a) b变化 (b) a1变化
由图7a可知,随着b增大,相位裕度先增大后减小,幅值裕度逐渐增大,但是过大的b可能导致系统不稳定。由图7b可知,随着a1增大,幅值裕度和相位裕度逐渐增大,但是增大到一定范围,其相位裕度有减小趋势。由图7c可知,随着a0变化,幅值裕度和相位裕度基本不变,表明该参数对系统稳定裕度的影响较小。可见,所提方法在大的系统参数变化范围下依然能够保证系统的稳定性,表明该方法具有良好的控制鲁棒性。特别地,当辨识模型参数接近实际参数时,系统的综合稳定性能较好。
3 仿真与实验
3.1 仿真分析
为验证所提出MMADRC的控制性能,以式(22)作为光电稳定平台方位轴的被控对象模型,在MATLAB/Simulink软件环境下进行仿真实验,并与LADRC和MADRC进行对比。3种控制方法选取相同的观测器带宽和控制器带宽,分别进行目标速度定速和速度正弦跟踪的仿真实验。
首先,给定目标速度为60 (°)/s,最大加速度900 (°)/s2,规划时间0.1 s,并在1 s处加入幅值为-1 N·m的常值力矩干扰。得到速度定速响应曲线和其误差曲线如图8所示。

(a) 定速响应曲线 (b) 误差曲线
由图8可知,MMADRC对常值力矩扰动的抑制能力强,其抑制时间为0.055 s,优于LADRC的0.189 s和MADRC的0.086 s;另外, MMADRC的动态响应较好,到达±0.05 (°)/s的稳定时间为0.109 s,优于LADRC的0.378 s和MADRC的0.123 s。
接着,让平台跟踪频率为2.5 Hz,幅值为1 (°)/s的正弦速度输入信号,得到3种控制方法的跟踪误差曲线,如图9所示。
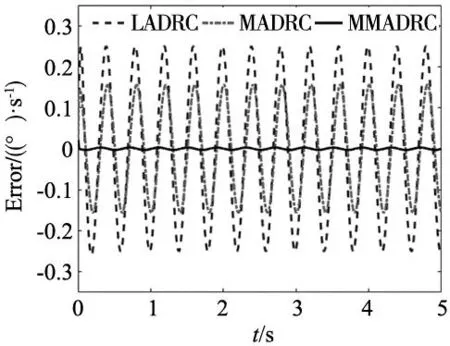
图9 正弦信号跟踪误差图
由图9可知,在相同的控制带宽参数下,LADRC、MADRC和MMADRC的正弦信号跟踪误差峰值分别为0.250 (°)/s、0.156 (°)/s和0.003 (°)/s,因此MMADRC的速度正弦跟踪性能明显优于LADRC和MADRC。
3.2 实验分析
为验证仿真分析结果,搭建基于dSPACE控制器的光电稳定平台实验系统,以平台方位轴为被控对象进行低速跟踪实验和速度稳定实验。实验原理如图10所示,其中,dSPACE控制器接收上位机发送的目标速度指令和陀螺仪速度传感器采集的方位轴速度信号,并设计速度环和电流环控制器计算得到控制信号,经PWM功率放大电路输出至光电稳定平台,最终驱动方位轴力矩电机转动。
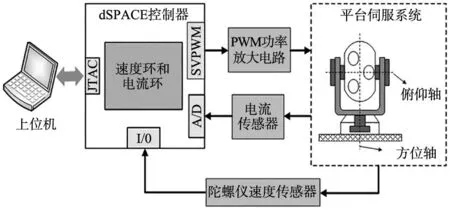
图10 实验原理示意图
设定载体静止,让光电稳定平台跟踪0.5 Hz,1 (°)/s的正弦输入信号,对比3种控制方法的跟踪误差,实验结果如图11所示。
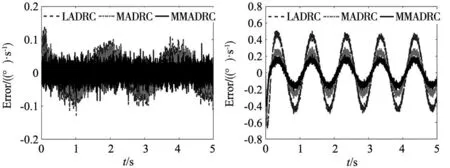
图11 低速跟踪实验的误差曲线
从图11可知,相比于LADRC和MADRC,MMADRC的跟踪误差总体比较平稳。LADRC、MADRC和MMADRC跟踪误差的标准方差分别为0.041 (°)/s、0.031 (°)/s和0.023 (°)/s,表明MMADRC具有更加优异的跟踪性能。
设定载体以1 Hz, 6.3 (°)/s的速度进行晃动,光电稳定平台的期望速度为0 (°)/s。提取陀螺仪速度传感器相对于零点的扰动误差数据,实验结果如图12所示。
从图12可知,MMADRC的扰动误差范围明显小于LADRC和MADRC。LADRC、MADRC和MMADRC的扰动误差峰值分别为0.507 (°)/s、0.315 (°)/s和0.222 (°)/s,扰动误差的标准方差分别为0.320 (°)/s、0.185 (°)/s和0.116 (°)/s,因此所提方法进一步提高了光电稳定平台对载体运动的扰动抑制能力,保证了稳定精度。
4 结论
针对某型两轴两框架光电稳定平台,提出了MMADRC方法来实现平台的稳定跟踪和扰动抑制。所提方法设计了融合模型信息的模型扩张状态观测器,能够对系统总扰动进行准确估计,通过总扰动补偿,将被控对象模型修正为准确的辨识模型形式,并基于该辨识模型进行误差反馈控制器的设计和相关参数的整定。论文通过仿真实验验证了所提MMADRC方法的控制性能。通过与LADRC和MADRC方法的仿真和实验效果比较,表明所提方法在扰动抑制及稳定精度等方面具有明显的优势,这为进一步改善光电稳定平台的运动性能,提供了较高的参考价值和实用价值。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
制造业自动化(2017年2期)2017-03-20
山东青年(2016年12期)2017-03-02
贵州师范学院学报(2016年3期)2016-12-01
光学精密工程(2016年6期)2016-11-07
装备制造技术(2016年7期)2016-09-26
制造技术与机床(2016年3期)2016-08-31
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
