新能源乘用车激光雷达概况及应用研究
2024-04-29 07:11周侠吴雪珍谭鑫
传感器世界 2024年2期
周侠,吴雪珍,谭鑫
重庆睿蓝汽车研究院有限公司,重庆 401122
0 引言
当前,新能源汽车作为高科技产品涉及众多领域,如节能降耗、碳中和、辅助驾驶、人工智能、车联网等。其中以新能源乘用车最具代表性,其将众多最新科技融入产品中并进行实际应用。与传统汽车产品相比,较强的辅助驾驶功能是新能源乘用车的一项典型特征,而激光雷达作为高阶辅助驾驶技术中的关键零部件,具有价值高、精度高、科技含量高的特点,其在大多数传统车企及新能源“新势力”厂家产品中的应用也越来越广泛。本文将对激光雷达这一新兴的新能源汽车零部件在工作原理、种类及应用等方面展开讨论。
1 激光雷达介绍
激光雷达是集激光、全球导航定位系统(Global Navigation Satellite System,GNSS)和惯性测量装置(Inertial Measurement Unit,IMU)3 种技术于一身的系统,具有分辨率高、隐蔽性好、抗干扰能力强等优势,主要面向辅助驾驶汽车环境感知、机器人环境感知、无人机测绘等领域。
激光雷达通过激光发射组件发射高频率激光束对外界环境进行持续性的扫描,经过测距算法提供三维空间点云数据及物体反射率,可以让机器“看到”周围的世界,从而为定位、导航、避障等提供有力的保障(如图1 所示)。

2 激光雷达的类型
激光雷达按扫描方式大体可以分为3 种类型:机械式、固态式和混合固态式。
机械式即机械旋转式,是指激光雷达发射系统和接收系统存在物理意义上的转动,不断旋转的发射器将激光点变成线,并在竖直方向上排布多束激光发射器,形成面,实现3D 扫描。激光雷达的帧频和扫描频率与转速直接相关,旋转一周,扫描一次,扫描一次,输出一帧点云[1]。但机械式激光雷达的内部结构复杂,主要包括激光器、扫描器、光电探测器以及位置和导航器件。由于通过复杂的机械结构实现高频准确的转动,其硬件成本高,且很难保持长时间稳定运行。机械式激光雷达如图2 所示。

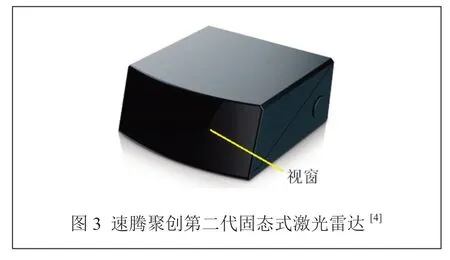
固态式是指激光雷达为单个整体,没有需要旋转和可动的扫描部件,其工作可靠性高。随着自动驾驶技术的发展和传感器硬件技术的更新,固态激光雷达未来会大批量地搭载到量产车型中,以满足车规级自动驾驶的要求[3],如图3 所示。
混合固态式类似于机械式,通过电机带动反射镜运动(反射镜又可分为微振镜、转镜、双轴转镜等),将激光反射到不同的方向,实现一定范围内激光的扫描(即光学包络FOV),如图4、图5 所示。

混合固态式是机械式和固态式的折中方案(较机械式只扫描前方一定角度内的范围,较固态式仍有一些较小的活动部件),一些厂家采用先进技术和工艺,不仅保证了激光雷达的高性能和可靠性,而且大幅降低了量产成本[5],是目前阶段量产装车的主流产品,如表1 所示。

表1 车用激光雷达主要供应商及装车产品
3 激光雷达的应用
3.1 车用激光雷达的安装位置
目前量产的新能源汽车产品中,激光雷达的安装位置主要有车顶(前或后)、前保险杠(居中或者两侧)、前翼子板(两侧)等,如图6 所示,不同安装位置的优缺点如表2 所示。最常见的方案是采用1 颗激光雷达安装在车顶前部;少数车型采用2 颗激光雷达安装在前保险杠两侧;采用3 颗及以上激光雷达的方案,一般会在前翼子板两侧再分别安装1 颗激光雷达。激光雷达数量越多,雷达扫描的范围越大,性能也越好(多数存在性能冗余现象),同时,产品成本也越高。
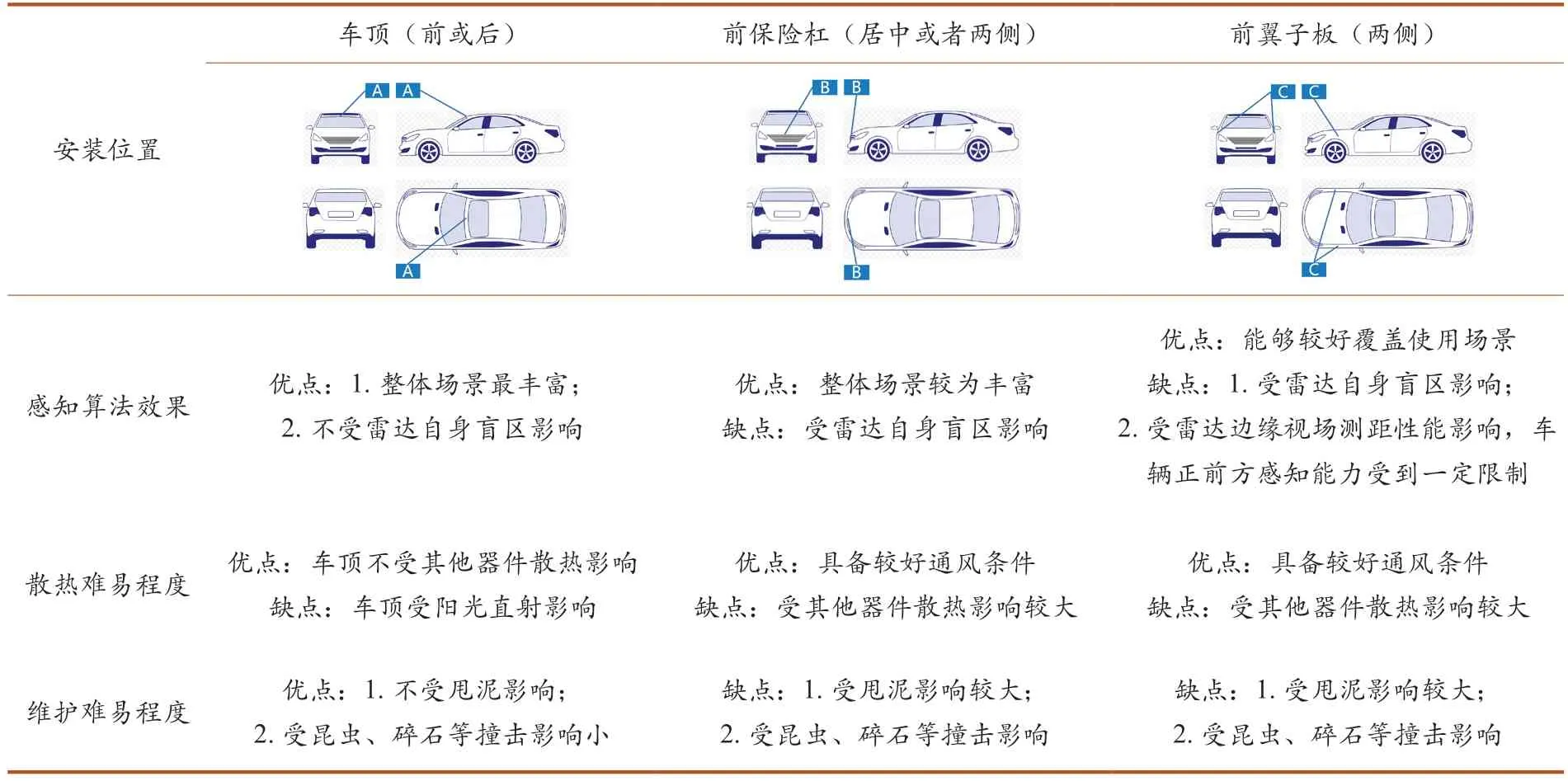
表2 激光雷达不同安装位置的优缺点

3.2 车用激光雷达的技术要求
车用激光雷达的技术要求主要有以下几点:一是整车在空载状态下,激光雷达的安装位置离地高度(此高度根据不同布置方案,一般是一个区间范围),布置在车顶时,高度一般小于1.8 m,布置在前保险杠时,高度一般为400~800 mm,布置在前翼子板时,高度一般为400~1 800 mm;二是激光雷达的光学包络(FOV)内不允许出现遮挡,需着重考虑雷达装饰板、雨刮、A 柱、前舱盖等的影响,现阶段,装车的激光雷达产品的视窗(FOV 发射面)外不允许有遮挡的零件,同时需要保证FOV 与其他零件有3 mm 以上的安全间隙(考虑到零件制造及安装误差);三是激光雷达的安装角度需要满足一定要求,比如雷达仰角(即上下方向)一般为0°(雷达垂直方向的FOV 中心线与地面夹角),左右摆角(即水平方向)一般为0°~115°(雷达的FOV 中心线与车辆纵向对称面夹角)。除了以上几点要求,在零件装配公差、零件的适配形状等方面也有相应的要求,同时,不同厂家对于具体指标的要求也存在差异,需要根据具体零件选型进行分析。
4 结束语
本文介绍了激光雷达的工作原理、分类、特点,车用激光雷达一般的安装位置及一般技术要求,对于了解新能源乘用车激光雷达及其实际应用具有重要参考意义;同时,通过近年来对激光雷达发展情况的分析可知,未来几年,混合固态及固态激光雷达在新能源汽车中的应用将成为趋势,发展潜力巨大。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
劳动保护(2019年3期)2019-05-16
上海建材(2019年4期)2019-02-13
纺织科学研究(2017年6期)2017-07-03
浙江化工(2017年4期)2017-01-21
汽车零部件(2016年6期)2016-07-18
制造技术与机床(2015年10期)2015-04-09
汽车维护与修理(2015年1期)2015-02-28
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年5期)2014-02-27