
基于变电站一体化电源系统的断路器自动化控制方法
2024-04-27 06:54赵凌骏庄汝学姚浩威
自动化与仪表 2024年4期
赵凌骏,王 慧,庄汝学,姚浩威
(苏州电力设计研究院有限公司,苏州 215007)
变电站一体化电源系统是一种高效、可靠、智能的电源管理系统,广泛应用于现代电力系统中[1]。该系统具有高效、可靠、智能等优点,能够满足电力设备对电源的各种需求[2]。断路器作为该系统中的关键设备之一,能够实现对电源的有效控制和保护,确保电力设备的安全运行[3]。然而,随着系统规模的扩大和复杂性的增加,传统的断路器控制方法已无法满足现代电力系统的要求。因此,研究断路器自动化控制方法具有重要的现实意义和实用价值[4]。文献[5]通过RBF 网络对系统进行建模,并使用PID控制器对模型输出进行调节,从而实现对断路器的精确控制,但RBF 网络的训练需要大量的数据和计算资源,对于一些实时性要求较高的应用场景并不适用。文献[6]采用高灵敏度的监测装置,实时监测真空断路器的状态,并结合PID 控制算法,完成断路器控制,但高灵敏度的监测装置易受环境干扰,导致监测数据出现误差,从而影响断路器控制的准确性。为提高断路器的控制效率和可靠性,确保变电站一体化电源系统安全稳定运行,本文研究基于变电站一体化电源系统的断路器自动化控制方法。
1 断路器自动化控制方法
1.1 变电站一体化电源系统的断路器运动特性分析
变电站一体化电源系统内,利用法兰连接驱动电机操作机构和断路器,通过传动机构变更电机的旋转运动,使断路器触头进行直线运动,完成分合闸操作[7-9]。因此,自动化控制断路器就是控制连接断路器的电机操作机构,实现断路器的分合闸控制[10]。变电站一体化电源系统的断路器动触头运动速度v(t),以及驱动电机转速n(t)的相应关系为
式中:l 为变电站一体化电源系统的断路器动触头行程;α 为驱动电机主轴的转动角度。
通过式(1)可知,v(t)和n(t)具有线性关系,调节n(t)便可完成对v(t)的自动化控制。
断路器运动特性方程为
式中:U为断路器电机操作电压;i 为电流;R 为电阻;L 为电感;θ 为电机主轴角速度;t 为时间;Tm、TL为电磁、负载转矩;k 为变电站一体化电源系统的断路器电机操作机构的转矩常数;J 为转动惯量。
简化式(2)可得:
可变更为
式中:θ0为理想空载转速。
2.2.4 沟渠底泥清淤 底泥清淤在国外广泛应用,而国内处于起步阶段。目前国内对湖泊底泥清淤已着手研究,结果表明:清淤后水体磷的含量比清淤已前有所下降,降幅为10%~25%[16]。沟渠的清淤处理显然也能降低底泥中磷含量,但清淤的底泥怎么处置也是一个有待解决的问题,若将其弃置沟渠旁,底泥中的氮、磷会随降雨淋溶再次汇入沟渠水体造成二次污染。目前,利用循环流动装置去除溶解磷[17]。可利用底泥中富含养分,让底泥还田,但还鲜有报道。
通过求解式(4)可获取变电站一体化电源系统的断路器电机启动速度变化规律,公式为
通过式(5)可知,在变电站一体化电源系统的断路器带载启动过程中,U 属于影响断路器电机转速n(t)的主要因素,同时U 与n(t)具有线性关系。为此,在控制变电站一体化电源系统的断路器分合闸操作过程中,能够以调节断路器电机操作电压的方式[11],控制电机转速,从而控制断路器触头的运动速度,达到变电站一体化电源系统的断路器自动化控制的目的[12]。
1.2 断路器自动化控制器的外环控制
通过数字式双闭环的方式,设计变电站一体化电源系统的断路器自动化控制器,其中,内环是电流环,外环是速度环,外环通过位置检测得到变电站一体化电源系统的断路器动触头速度信号,利用单神经元自适应PID 控制算法,调节断路器动触头速度,得到参考电压值。内环通过对比分析实际电压值和外环输出的参考电压值,结合模糊PI 控制算法,调节电压输出,控制电机转速,从而控制断路器触头的运动速度[13],达到变电站一体化电源系统的断路器自动化控制的目的。
以变电站一体化电源系统的断路器期望动触头速度信号vr(t),以及设定动触头速度信号v(t)间的差值e(t),为单神经元自适应PID 控制算法的输入量xi(t),i=1,2,3。通过神经元学习控制需要的输入量x1(t)、x2(t)、x3(t),其中,x1(t)=e(t),x2(t)=Δe(t),x3(t)=e(t)-2e(t-1)+e(t-2),Δe(t)为动触头速度信号插值变化率。
神经元以关联搜索的方式,形成变电站一体化电源系统的断路器参考电压值控制信号,单神经元自适应PID 控制算法的输出公式为
式中:K 为比例系数;wi(t)为加权系数。
wi(t)的计算公式为
以断路器电机操作机构参考电压输出误差的二次方,为外环控制的性能指标,性能指标函数公式为
F1的下降方向是wi(t)的调整方向,wi(t)的梯度为
wi(t)的调整公式为
式中:i=P,I,D。
1.3 断路器自动化控制器的内环控制
依据式(12)与式(13)可得到对应的4 条模糊控制规则H1、H2、H3、H4,通过Larsen 推理法,可获取:
通过Lukasiewica 模糊逻辑推理λH2∨H3,得到:
在式(14)内添加式(15)可获取:
按照KE·E(t)与KΔE·ΔE(t)的组合类型,平分平面KE·E(t),KΔE·ΔE(t),得到4 个区域Z1、Z2、Z3、Z4。
在KE·E(t),KΔE·ΔE(t)处于Z1内时,在式(16)内添加λH1,λH2,λH3,λH4得到:
同理获取:
整理式(17)与式(18)得到:
2 性能与分析
以某变电站一体化系统的断路器为实验对象,该变电站一体化系统的结构如图1 所示。
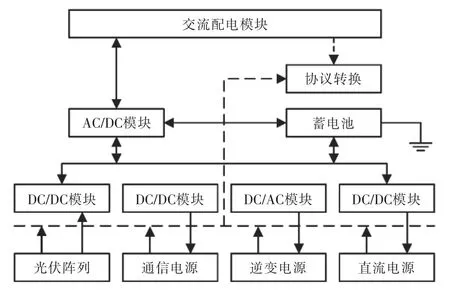
图1 变电站一体化系统的结构Fig.1 Structure of integrated substation system
图1 中,实线为电路线,虚线为通信线。利用DC/DC 模块连接光伏阵列与蓄电池,可为蓄电池及时充电,确保其电量充足。利用双向AC/DC 模块完成变电站一体化电源系统的并网功能。通过直流电源为变电站一体化电源系统内的控制装置与保护装置等提供电源。利用通信电源为电源系统内的通信设备提供电源。采用逆变电源为电源系统内的交流设备提供电源。该变电站一体化电源系统内的断路器参数如表1 所示。
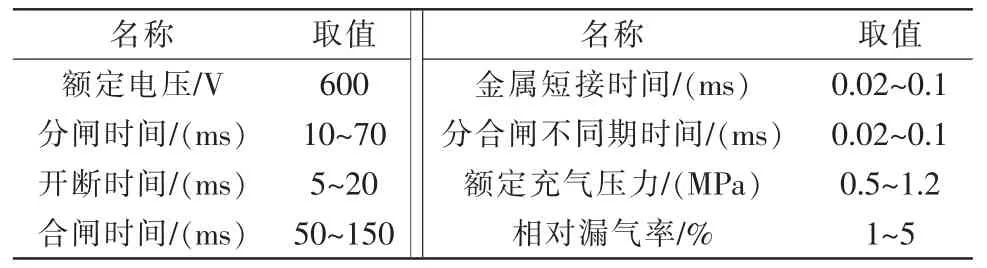
表1 变电站一体化电源系统内的断路器参数Tab.1 Circuit breaker parameters in integrated power supply system of substation
利用本文方法对该断路器分、合闸操作进行自动化控制,分闸与合闸操作的自动化控制结果如图2 所示。

图2 分闸与合闸操作的断路器自动化控制结果Fig.2 Results of automatic control of circuit breaker in opening and closing operationa
从图2(a)中可以看出,变电站一体化电源系统的断路器分闸过程中,断路器动触头运动速度峰值出现在0.05 s 左右,本文方法自动化控制的动触头运动速度变化曲线,始终在动触头运动速度的上限与下限之间,并未出现越界情况,说明本文方法可有效自动化控制断路器的分闸操作。从图2(b)中可以看出,变电站一体化电源系统的断路器合闸过程中,断路器动触头运动速度峰值出现在0.07 s 左右,合闸过程中,本文方法自动化控制的动触头运动速度变化曲线,也始终在动触头运动速度的上限与下限之间,并未出现越界情况,说明本文方法可有效自动化控制断路器的合闸操作。
分析本文方法在自动化控制断路器合闸过程中,断路器电机操作机构电压的变化情况,分析结果如图3 所示。
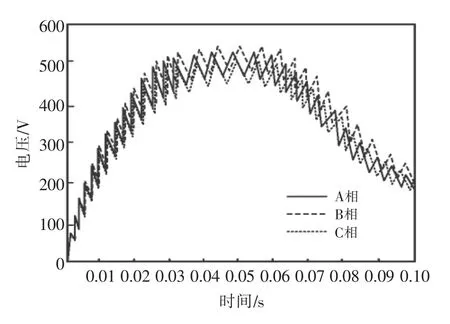
图3 合闸时断路器电机操作机构电压的变化情况Fig.3 Voltage change of the circuit breaker motor operating mechanism during closing
分析图3 可知,使用本文方法自动化控制断路器执行合闸操作时,最大电压值在540 V 左右,并未超过额定电压值,说明本文方法可有效避免线圈损坏问题出现,确保断路器可正常工作,提升变电站一体化电源系统运行的安全稳定性。
利用断路器动触头跳变信号衡量本文方法自动化控制断路器的操作稳定性,分析不同电容下,本文方法断路器自动化控制合闸操作时的操作稳定性,实验结果如图4 所示。

图4 不同电容下断路器自动化控制的操作稳定性Fig.4 Operational stability of automatic control of circuit breakers under different capacitors
从图4(a)中可以看出,当电容为4500 μF 时,本文方法自动化控制断路器合闸操作时,当时间在0.05 s 以内时,动触头跳变信号点与理想跳变信号完全重合,当时间超过0.05 s 时,动触头跳变信号点与理想跳变信号相比,存在小幅度的波动情况,但波动幅度较小,说明在电容为4500 μF 时,本文方法自动化控制断路器合闸操作时的操作稳定性较优。从图4(b)中可以看出,当电容为45000 μF 时,本文方法自动化控制断路器合闸操作时,动触头跳变信号点始终在理想跳变信号附近波动,波动幅度相比电容为4500 μF 时的波动幅度略有提升,但总体波动幅度依旧较小,说明在电容为45000 μF 时,本文方法自动化控制断路器合闸操作时的操作稳定性也较优。
3 结语
本文的研究成果将为变电站一体化电源系统的断路器自动化控制提供新的思路和方法,有助于提高变电站一体化电源系统的安全稳定性。本文方法通过自动化控制技术实现对断路器的智能控制,能够实现快速、准确的开关操作,同时减少人为操作失误和设备损坏。同时,本文将进一步丰富和发展变电站一体化电源系统领域的相关理论和技术,为今后的研究和实际应用提供参考和借鉴。此外,随着智能电网和物联网技术的不断发展,未来的断路器自动化控制方法将更加智能化和自适应化。因此,未来的研究可以进一步拓展断路器自动化控制方法的思路和应用范围,以适应未来变电站一体化电源系统的需求和发展。
猜你喜欢
皮革制作与环保科技(2020年14期)2020-03-17
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26
水科学与工程技术(2016年2期)2016-07-10
浙江大学学报(工学版)(2016年9期)2016-06-05
铜业工程(2015年4期)2015-12-29
电测与仪表(2015年20期)2015-04-09
水电站机电技术(2014年4期)2014-10-13
