基于3D打印技术的医用压缩袜压力测量用柔性假肢的开发
2024-04-24 13:28孙光武李青李储林韩慧敏陈郁胡红艳胡文锋
丝绸 2024年4期
孙光武 李青 李储林 韩慧敏 陈郁 胡红艳 胡文锋


Development of flexible prostheses for the pressure measurement of medical compression stockings based on 3D printing technology
摘要:医用压缩袜在进行压力测试时,需要将产品套于木制标准腿模上。然而木制腿模因其表面硬度與人体皮肤差异巨大,所测量的压力值并不能代表真实人体所受到的压力值。文章旨在采用3D打印技术开发一种更符合人体皮肤的柔性假肢,并利用接触压力测量仪测量医用压缩袜分别在真实人体下肢、柔性假肢和木制腿模上的压力分布。通过对比测量结果,发现医用压缩袜在木制腿模上会产生较真实人体更大的压力,而柔性假肢的压力分布更符合真实人体。此外,引入Spearman 相关检验,发现柔性假肢的压力测量结果与真实人体的相关系数达到0.86 而木制腿模的压力测量结果与真实人体的相关系数仅为0.516。研究表明,开发的3D打印柔性假肢可更加精确地评估医用压缩袜的压力等级,并能进一步用于医用压缩袜的标准测试。
关键词:医用压缩袜;接触压力;木制腿模;柔性假肢;真实人体;测试标准
中图分类号:TS181.8
文献标志码:A
文章编号:10017003(2024)04009708
DOI:10.3969j.issn.1001-7003.2024.04.012
收稿日期:20230714;
修回日期:20240313
基金项目:海南省自然科学基金项目(223MS054)
作者简介:孙光武 (1986),男,副教授,主要从事功能性运动纺织品的研究。
医用压缩袜可从脚踝至大腿提供可控的梯度压力,广泛用于治疗糖尿病足、下肢静脉曲张等疾病。医用压缩袜根据其产生的压力值可分为多个等级,不同等级产生不同的治疗效果[1-4]。当前有两种测量方法可用于测量医用压缩袜产生的压力值,即间接测量法和直接测量法。间接测量法一般将医用压缩袜裁剪成固定尺寸,通过单轴或双轴拉伸机,测量织物拉伸过程中的应力和应变,并根据拉普拉斯方程计算出医用压缩袜产生的压力值[5-7]。然而,Basford[8]却认为拉普拉斯方程中并无织物厚度参数,当实验使用的压缩袜较厚时,间接测量结果与直接测量结果的误差将达到5%。Khaburi等[9-10]提出了一个基于厚壁圆柱理论的模型用于较厚实织物的压力计算,并使用多层医用压力绷带进行实验验证。模型虽然获得了较好的预测结果,但厚壁圆柱理论却忽略了人体四肢沿其长度方向的直径变化。由此,Sikka等[11]提出将人体四肢假设为圆锥体,并进一步发展了一种圆锥理论模型用于预测织物产生的压力值。虽然理论模型一直在改善,但是理论模型仅能够预测织物在整个接触面上产生的平均压力。
直接测量法采用压力传感器测量医用压缩袜对接触面任意一点产生的压力值,通过多次测量后可输出整个接触面上不同位置处的压力分布[6-7]。然而,由于接触面的硬度直接影响测量的结果,所以很多研究者如Mayberry等[12]和Liu等[13]将医用压缩袜穿在真实人体上,并完成压力测量。真实人体的实验亦受到诸多限制,例如受试者需要保持静止,任何身体的抖动甚至呼吸将会影响测试稳定性;真实人体实验需要招募大量的受试者,且实验的时间成本、人力成本较高。由此,研究者纷纷开发出一些可替代真实人体的各类设备。Van等[14]开发出标准木制腿模用于Salzmann医用压缩袜测试仪,而在英国标准研究所(BSI)提出的标准BS 661210: 2008中展示了一组硬质架子,通过提升杆来改变架子的尺寸从而模拟不同尺寸的人腿。Maqsood等[15]则采用了一种数字压力测量设备连接了三个小型压力传感器和一个硬圆筒,用于测量织物在硬圆筒上产生的压力。Kwon等[5,7]则使用了一种称为CRIM的压力测量系统,也是由PicoPress压力传感器和硬质塑料圆筒组成。
由此可见,在织物压力测量领域,亟需开发一种可替代真实人体的柔性设备。Yu等[16]开发了一款含有仿生骨骼、软组织和皮肤的假腿;Zhao等[17]则开发了一款假臂并进行了服装袖部压力的测量。此外,Yang等[18]展示了一款具有高灵敏度压力传感器网络的智能仿生可变尺寸的假腿,为常规测试和个人定制压缩服装提供精确的压力测量。然而由于缺乏高精度加工,他们研发的假腿围度尺寸与中国人体公称腿尺寸不符。
3D打印是一种高精度增材制造技术,可更加精确地控制加工产品细部尺寸。然而大部分3D打印品是硬质材料,目前并没有柔性假肢的报道。所以,本文将采用3D打印技术,基于中国公称腿尺寸制造一款柔性假肢,并用于医用压缩袜的测试。此外,本文还采集了医用压缩袜在真实人体下肢、木制腿模和柔性假肢上产生的压力,并进行了对比分析,从而探索改进医用压缩袜测试标准的新方法。
1 柔性假肢的制造与压力测试实验
1.1 柔性假肢的制造过程
表1为本实验中所使用到的材料与设备信息。首先采用博克人体三维扫描仪将木制腿模进行三维扫描。扫描获得的点云数据导入至逆向工程软件Geomagic Wrap 中,并在Geomagic Wrap中对点云数据进行平滑、消噪、修补处理,并添加膝关节、脚趾等部位形成一个仿真的3D体模型。将形成的模型文件导入3D打印机中,装入PVC线材,开启打印机逐步打印出腿部模具。在液态硅胶中加入适量的消泡剂充分搅拌,静置5 min后进行浇注。缓慢并匀速将液态硅胶导入腿部模具中,并室温下静置12 h,待硅胶固化。最后掰去3D打印的PVC腿部侧面模具,获得硅胶柔性假肢(图1)。
1.2 压力测试实验
为了验证制造的柔性假肢用于医用压缩袜压力测试的准确程度,需使用气囊式接触压力测试仪测量医用压缩袜在柔
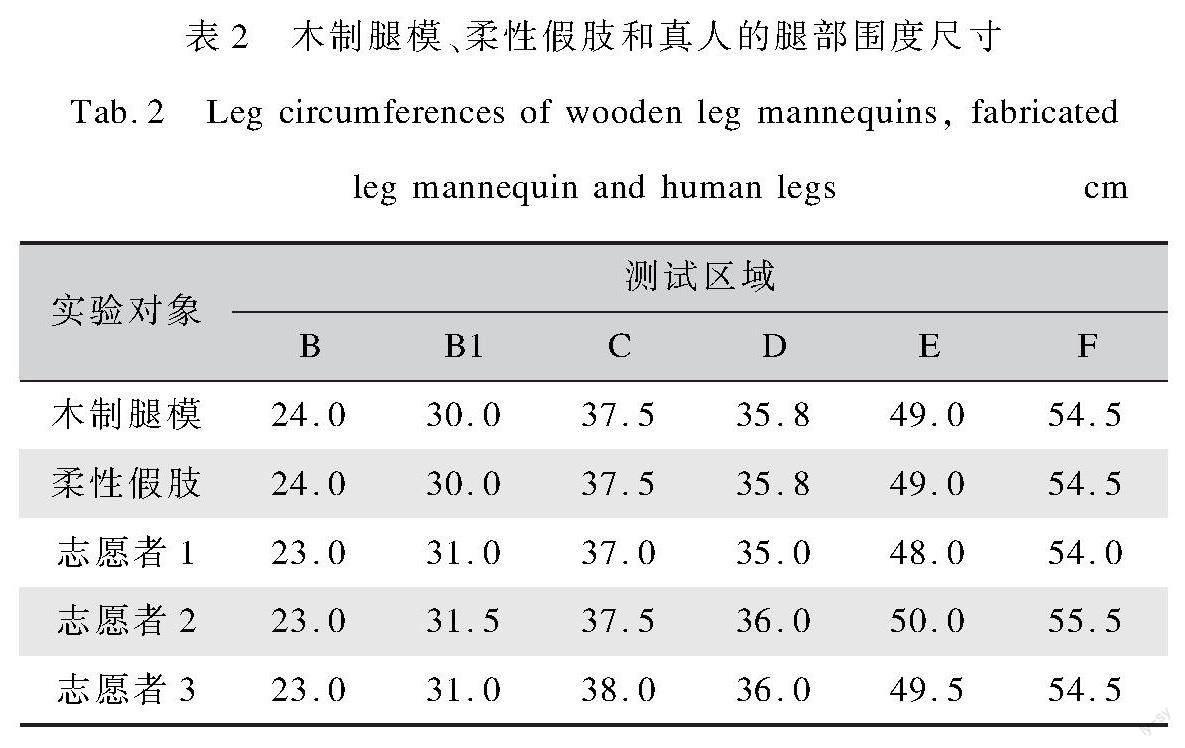
性假肢和标准木制腿模上测量压力值。根据中国纺织行业标准FZT 73031—2009《压力袜》,需测试如图2所示的六条围度方向截面曲线B、B1、C、D、E、F上的压力值。为了更精确
地测量压力值,本文还沿腿模的长度方向,即圖2中P、M、A、L四个方向开展压力测试。每个横截面上均有四个方向,即四个测量点。六个截面所包含的测量点共24个,所以每条压缩袜共计需测量24个位置的压力。同时为了进一步减少误差,测试前,每条压缩袜样品需置于标准环境下(温度21°C,相对湿度 65%±2%)24 h,每个等级的医用压缩袜需完成3次测量。
为了进一步研究制造的柔性假肢与真实人体的差异,招募了三名身体健康的大学男生志愿者(平均年龄23岁,身高176.0±6.1 cm,体重73.1±5.3 kg,体质指数BMI 23.6±0.5 kgm2)。由于腿部围度尺寸直接影响穿着后压缩袜产生的压力值,为了消除此项影响,招募的志愿者腿部六个对应区域的围度尺寸应与木制腿模和柔性假肢保持基本一致,具体尺寸如表2所示。在志愿者穿着医用压缩袜后,用气囊式接触压力测试仪在腿部相应位置(图2)完成压力测试。测量过程中,当气囊式传感器读数时,志愿者应尽量保持呼吸稳定,并静止站立8~10 s,重复3次实验。
1.3 实验数据处理方法
完成压力测量后,计算相同测试区域的四个不同方向压力的平均值,并将该值作为测试区域的压力值。计算所有真实人体测量结果的平均值,然后利用Spearman非参数检验法统计分析压缩袜在真实人体下肢上产生的压力与柔性假肢和木制腿模的相关性。
2 结果与分析
2.1 不同腿压力测试总体比较
三种不同等级的压缩袜在不同实验对象上的压力测试结果是不同的,具体测试结果如表3所示。由表3可以发现,在真人腿部测得的压力变异系数CV明显大于木制腿模和柔性假肢,这是由于志愿者个体差异导致。即使严格根据各区域的尺寸要求筛选出三名志愿者,但个体差异仍旧使得测试结果的CV值较大。这也说明非常有必要设计标准测试用假肢,从而避免个体差异,有利于医用压缩袜的客观定量化评价。
依据实验对象的差异,将表3的数据作曲线,如图3所示。一个合格的医用压缩袜应该在脚踝部位产生最大的压力并逐级递减至大腿部位,图3中的曲线随大致满足逐渐下降的趋势,然而在部分区域出现了例外。在E区域的测试压力是整个腿部中最小的,而并非F区域。为了使得压缩袜在穿着时便于固定,厂家一般在F区域制作了较厚实的防滑带,这使得该区域的压力增大了。此外,在真人腿C区上测得的压力值小于B1区,而在柔性假肢和木制腿模上测得的压力值C区大于B1区域,这是由于木制腿模和柔性假肢的刚性大于真人腿,而C区的围度比B1区大。因此,在刚性较大的基础上C区围度大于B1区,C区测得的压力值大于B1区。
通过对比三个等级的压缩袜,可以发现Ccl3等级的压力值远高于Ccl1等级和Ccl2等级,而Ccl1等级和Ccl2等级的压力值相接近。而为了便于患者选用合适的医用压缩袜,不同等级间的袜子其压力值应具有明显差异,此项测试结果进一步说明在目前的中国国内市场上,生产厂商所标注的压力等级并未与实际压力相关联。在Liu等[22]的研究中亦提到了部分医用压缩袜产品并不符合标准中规定的压力范围。
即使实验中使用的医用压缩袜其Ccl1等级和Ccl2等级差异不明显,但这并不影响本文对开发的柔性假肢的定量评价。通过对比图3(a)(b)(c),可以发现医用压缩袜在木制腿模上产生的压力值较大,高于真人测试结果约500~1 500 Pa,而柔性假肢与真人的测试结果相近。这也说明在相同的围度条件下,使用硬质腿模其测试结果与真实人体有明显差距。
2.2 不同腿压力测试围度方向比较
在压力测试过程中,围度相似的受试者所测得的压力不可能完全相同,对压力值会产生影响。因此,用箱线图来绘制所有受试者在各个截面上测得的压力数据,如图4所示。由图4可见,在木制腿模上测得的压力最高,明显超出了人腿测量的接触压力范围。这一结果可能是由于木制腿模的材质与人体腿部不同;此外,标准木制腿模与真人腿部的形状并不完全一致。然而,在柔性假肢上测得的压力几乎与真人测量的接触压力一致。以上均进一步证实,与标准尺寸的木制腿模相比,在柔性假肢上测量的总体接触压力更接近人体腿部。
此外,表3显示了从踝关节到大腿区域的四个侧面接触压力的变异系数CV(前、内侧、后、外侧)。CV越大,不同侧面的接触压力差异越显著。首先,对于真人和标准木制腿模而言,最大的CV值在脚踝区域,最小的CV值在大腿区域,表明脚踝区域的接触压力在不同侧有显著差异。相比之下,不同位置的大腿区域略有差异。然而,木制腿模在不同区域和不同侧面的CV值略有差异,表明木制腿模人台在不同侧面测量的压力较为接近,甚至沿不同侧面测量的接触压力也接近。
2.3 不同腿沿其长度方向压力测试的比较
为了进一步评估所开发的柔性假肢在经向上的压力准确程度,将压力值绘制成雷达图,如图5所示。图5由腿的围度和长度两向字母构成测量位置标识,如FP表示围度方向F曲线与长度方向P线的交点位置,DL则表示围度方向D曲线与长度方向L线的交点位置,以此类推。图5中,医用压缩袜在柔性假肢和真人腿上的沿其长度方向A线测量的压力值总是最大的,而M线和L线上的压力值则远低于经线A。研究发现,这与人体腿部曲率特征有关。根据拉普拉斯方程,医用压缩袜对曲率半径较小的髌骨表面施加的压力更大。医用压力袜对人体表面产生的压力和人体腿部的局部形状有关,且人体腿部和制作的柔性假肢的横截面轮廓是不规则的。A、P两个方位的局部曲率大且骨头凸出,但L和M两侧局部曲率较为平坦且两侧皮肤表面内陷,尤其是在从踝关节区域到膝关节区域[8,21,22]。
由图5可见,在制作的柔性假肢上测得的各个方位的压力与在真人体上测得的各个方位的压力值的雷达图几乎保持一致,而雷达图中在木制腿模上测得的各个部位的压力值的图形更近似圆形。也进一步表明在制作的柔性假肢上测得的接触压力与人体腿部在四个侧面保持一致,而木制腿模各横截面不同侧面具有相近的压力。所以,木制腿模并不能反映医用压缩袜在人体下肢各向异性的压力分布规律。图5亦表明,制作的柔性假肢在外形上与人体腿部具有很大的一致性,更能够真实地测得医用压力袜施加在人腿上的各个部位的压力大小。
2.4 相关性分析
引入 Spearman相关性分析,分析所开发的柔性假肢其与真实人体和木制腿模在压力测量上的相关性(样本数72),如图6所示。由图6可以发现,柔性假肢与真实人体间的压力测试结果相关性为0.86 而木制腿模与真实人体间的压力测试结果相关性为0.516。前者的相关性远高于后者,这表明柔性假肢测得的压力分布与真实人体的分布规律基本一致。
3 结 论
本文采用液态硅胶开发了一种基于3D打印技术的柔性医用压缩袜测试用假肢。将三种不同等级的医用压缩袜分别穿着在木制腿模、柔性假肢和真实人体下肢上,采用气囊式接触压力测量系统测试医用压缩袜产生的压力。结果发现:1)对比三種不同腿测得的压力结果,表明用柔性假肢结果更接近真人所测得的压力结果。木制腿模所测得的压力和真人差距较大。此外,对比6个不同截面上4个不同侧面的压力分布,柔性假肢在踝关节区域的所测得的压力标准差最高,而在其他区域测得的压力标准差较低。人体腿部的横截面压力分布是不规则的,特别是从踝关节区域到膝关节区域。2)这三种装置沿不同侧面和截面测量的接触压力引入 Spearman相关性分析,测试结果发现,相对于常用的标准木制腿模,所开发的柔性假肢更符合真实人体下肢的压力分布规律。
一方面,将压力袜测量标准(FZT 73031—2009《压力袜》)中的标准木制腿模替换为柔性假肢,可提高压力测量精度;另一方面,为满足不同号型的和不同腿型的压力测试研究,可进一步采集中国不同人体的下肢数据开发不同类型的腿模进行压力测试,从而扩大柔性假肢的应用。
参考文献:
[1]LIU R, LAO T T, KWOK Y L, et al. Effects of graduated compression stockings with different pressure profiles on lower-limb venous structures and haemodynamics[J]. Advances in Therapy, 2008(25): 465-478.
[2]XU Y P, WANG W, ZHAO J, et al. Knowledge, attitude, and practice of healthcare professionals toward clinically applying graduated compression stockings: Results of a Chinese web-based survey[J]. Journal of Thrombosis and Thrombolysis, 2019(47): 102-108.
[3]WADE R, SIDERIS E, PATON F, et al. Graduated compression stockings for the prevention of deep-vein thrombosis in postoperative surgical patients: A systematic review and economic model with a value of information analysis[J]. Health Technology Assessment, 2015(19): 1-220.
[4]HOBSON D B, CHANG T Y, ABOAGYE J K, et al. Prevalence of graduated compression stocking-associated pressure injuries in surgical intensive care units[J]. Journal of Critical Care, 2017(40): 1-6.
[5]KWON C, HEGARTY M, OXENHAM W, et al. An indirect testing approach for characterizing pressure profiles of compression bandages and hosiery[J]. The Journal of the Textile Institute, 2018, 109(2): 256-267.
[6]PEAT D. A comparison of a direct and an indirect method of
measuring hosiery compression[J]. The Journal of the Textile Institute, 2008(70): 529-530.
[7]KWON C, HEGATRY M, OXENHAM W, et al. An introduction to a new direct testing method for characterizing pressure in compression fabrics[J]. The Journal of the Textile Institute, 2019, 110(6): 822-831.
[8]BASFORD J R. The law of laplace and its relevance to contemporary medicine and rehabilitation[J]. Archives of Physical Medicine and Rehabilitation, 2002, 83(8): 1165-1170.
[9]KHABURI J A, DEHGHANI-SANIJ A A, NELSON E A, et al. Effect of bandage thickness on interface pressure applied by compression bandages[J]. Medical Engineering & Physics, 2012, 34(3): 378-385.
[10]KHANBURI J A, NELSON E A, HUTCHINSON J, et al. Impact of multilayered compression bandages on sub-bandage interface pressure: A model[J]. Phlebology: The Journal of Venous Disease, 2011, 26(2): 75-83.
[11]SIKKA M P, GHOSH S, MUKHOPADHYAY A. Mathematical modeling to predict the sub-bandage pressure on a conical limb for multi-layer bandaging[J]. Medical Engineering & Physics, 2016, 38(9): 917-921.
[12]MAYHERRY J C, MONETA G L, DEFRANG R D, et al. The influence of elastic compression stockings on deep venous hemody-namics[J]. Journal of Vascular Surgrey, 1991, 13(1): 91-99.
[13]LIU R, KWOK Y L, LI Y, et al. Fabric mechanical-surface properties of compression hosiery and their effects on skin pressure magnitudes when worn[J]. Fibres & Textiles in Eastern Europe, 2010, 79(2): 91-97.
[14]VAN DEN BERG E C, BORGNIS F E, BOLLIGER A A, et al. A new method for measuring the effective compression of medical stockings[J]. Vasa. Zeitschrift fur Gefasskrankheiten, 1982, 11(2): 117-123.
[15]MAQSOOD M, NAWAB Y, UMAR J, et al. Comparison of compression properties of stretchable knitted fabrics and bi-stretch woven fabrics for compression garments[J]. The Journal of the Textile Institute, 2017, 108(4): 522-527.
[16]YU W, FAN J T, QIAN X M. A soft mannequin for the evaluation of pressure garments on human body[J]. Seni Gakkaishi, 2004, 60(2): 57-64.
[17]ZHAO L H, YU J, ZHANG S Y, et al. Study of an arm model for compression sleeve design and garment pressure measurement[J]. Journal of Engineered Fibers and Fabrics, 2019(14): 1-8.
[18]YANG B, WANG X, XIONG Y, et al. Smart bionic morphing leg mannequin for pressure assessment of compression garment[J]. Smart Materials and Structures, 2020, 29(5): 550.
[19]AKHTAR R, SHERRATT M J, CRUICKSHANK J K, et al. Characterizing the elastic properties of tissues[J]. Materials Today, 2011, 14(3): 96-105.
[20]YANG B, LIU S, WANG X, et al. Highly sensitive and durable structured fibre sensors for low-pressure measurement in smart skin[J]. Sensors, 2019, 19(8): 1811.
[21]LIU R, KWOK Y L, LI Y, et al. Objective evaluation of skin pressure distribution of graduated elastic compression stockings[J]. Dermatologic Surgery, 2005, 31(6): 615-624.
[22]LIU R, KWOK Y L, LI Y, et al. Skin pressure profiles and variations with body postural changes beneath medical elastic compression stockings[J]. International Journal of Dermatology, 2007, 46(5): 514-523.
Development of flexible prostheses for the pressure measurement of medical compression stockings based on 3D printing technology
SUN Guangwu1,2, LI Qing2, LI Chulin3, HAN Huimin1, CHEN Yu2, HU Hongyan2, HU Wenfeng2
(1.Mechanical and Electrical Engineering College, Hainan Vocational University of Science and Technology, Haikou 571126, China;
2.School of Textiles and Fashion, Shanghai University of Engineering Science, Shanghai 201620, China;
3.GTTC Testing Technology (Shanghai) Co.,Ltd., Shanghai 201616, China)
Abstract:Compression stockings establish a controlled pressure gradient from the ankle to the thigh, characterized by higher pressure at the ankle and lower pressure at the thigh. These stockings are widely utilized in medical, healthcare, sports, and body shaping contexts. The pressure value of compression stockings significantly impacts their application. To determine the pressure value, two primary methods are utilized: indirect and direct measurements. Indirect measurements depend on tension tests, and rely on Laplaces Law to determine the pressure exerted by the fabric on the interface by gauging the force value. However, these mathematical models only predict the average interface pressure of the pressure area, lacking detailed local pressure data. Direct measurements provide precise data on the local interface pressures exerted by compression stockings. Yet, various devices affect the accuracy of these measurements, including wooden leg mannequins and regular-shaped tubes. Currently, scholars are focusing on human legs to obtain precise compression stocking pressure values. Nonetheless, such measurements face limitations. Subjects must remain standing and stationary, as lower-limb trembling can introduce experimental data instability. Additionally, while devices simulating the human leg are used in measurements, rigid devices may not provide accurate pressure values compared to actual human legs. Soft mannequins are gradually replacing rigid ones in this context.
The leg mannequin was utilized to measure the stocking at four distinct locations across six cross-sectional planes. By comparing the contact pressure data obtained from the fabricated leg mannequin, the standard-sized wooden leg mannequin, and human legs, it was found that the the pattern observed in the fabricated mannequin aligned closely with that of human legs. Notably, the wooden mannequin exerted a significantly higher level of contact pressure compared to human legs. Furthermore, the local contact pressure data from the fabricated leg mannequin demonstrated strong concurrence with that of human legs. The Spearman rank correlation confirmed a notable correlation between the contact pressure data from the fabricated mannequin and human legs. This suggests that the fabricated leg mannequin offers consistent performance with respect to the human leg, enabling it to serve as a suitable replacement for standard tests involving the standard-sized wooden leg mannequin.
The novel leg mannequin offers precise pressure measurements for compression stocking standard tests and serves as helpful reference. Additionally, as compression stocking standards vary across different countries, this study contributes to a global application where the standardized fabricated leg mannequin can serve as reliable reference for standard contact pressure measurements.
Key words:
medical compression stockings; contact pressure; wooden leg mannequin; flexible prosthesis; real human body; test standards