基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法
2024-04-22 01:58刘怡然杜月云
机械与电子 2024年4期
刘怡然,李 威,杜月云
(1.商丘职业技术学院,河南 商丘 476005;2.商丘工学院,河南 商丘 476000)
0 引言
随着科学技术与生活品质的不断提高,汽车成为日常生活中不可缺少的交通工具。为保证驾驶安全,如何控制汽车后桥螺旋锥齿轮的畸变成为研究人员的关注重点,其中的关键就是对汽车后桥螺旋锥齿轮的畸变控制方法做出升级和优化[1]。由理论和实验依据证明,研究汽车后桥螺旋锥齿轮的畸变控制方法成为目前亟需解决的问题和研究重点。
方秀荣等[2]采用有限元软件对汽车后桥螺旋锥齿轮做定向测量,得到齿轮发生畸变时的信号参数,然后通过控制信号参数的温度场与应力场完成汽车后桥螺旋锥齿轮的畸变控制。但该方法没有剔除信号中的噪声,导致控制效果较差。田亚平等[3]针对汽车后桥螺旋锥齿轮的混沌运动,首先采用改进的OGY混沌控制算法得到齿轮运行周期的畸变轨道,然后通过有限差分法将畸变轨道转换成光滑多维点矩阵,最后根据变分形式与动力学方程对矩阵求解,完成汽车后桥螺旋锥齿轮的畸变控制。但该方法没有对畸变轨道实行多重采样处理,导致控制精度较低。莫易敏等[4]首先获取汽车后桥螺旋锥主动齿轮与被动齿轮之间的接触偏移区域,然后采用偏移原理与热处理畸变算法处理偏移区,得到齿轮运动阶段的补偿畸变变量,最后将畸变变量输入到齿轮控制模型中完成汽车后桥螺旋锥齿轮的畸变控制。但该方法没有提取畸变变量的特征,导致控制误差较大。为解决上述方法中存在的问题,提出基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法。
1 汽车后桥螺旋锥齿轮的振动信号采集与预处理
1.1 基于相控阵超声技术的齿轮振动信号采集
基于相控阵超声技术的齿轮振动信号采集具体如下所述。
a.基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法,首先采用相控阵超声传感器采集齿轮的振动信号,并形成具有固定序列的阵元模型。
b.与传统的信号采集器相比,相控阵超声传感器可以自动控制振动信号的波束,其基本结构主要包括晶片阵列平面、吸声装置、匹配层与电极引线4部分。其中,阵列平面包含16个独立阵元,每个阵元之间的距离为0.5 cm,剖面如图1所示。

图1 相控阵超声传感器剖面
c.用相控阵超声传感器采集汽车后桥螺旋锥齿轮振动信号时,传感器探头可以360°旋转,并且相控阵探头的楔块使用的是与齿轮表面弯曲率相匹配的弧形楔块,所以可以通过弧形楔块及探头的控制单元,实现周向与轴向的信号声场采集。公式为
(1)

1.2 齿轮振动信号降噪处理
由于基于相控阵超声技术采集的汽车后桥螺旋锥齿轮振动信号受畸变回波的影响,存在大量的噪声信号,因此,为了避免噪声对畸变控制过程产生影响,采用异性扩散降噪法剔除其中的噪声[5],具体步骤如下:
a.异性扩散降噪算法采用偏微分方程扩散汽车后桥螺旋锥齿轮振动信号的局部分散算子,经过扩散后的信号向各方向呈现离散形式[6],公式为
(2)
式中:J为采集的汽车后桥螺旋锥齿轮振动信号;a为相控阵超声探头的采样点数;b为声程采样点数;α为信号整体扩散速度;β为信号在不同方向的扩散程度;h为扩散系数;ΔJ为齿轮信号在360°方向上的灰度梯度;l为迭代次数。
b.作为异性扩散降噪算法的核心步骤,扩散系数的函数计算公式为
(3)
式中:d为平滑参数;g为信号边缘度量参数,是信号在扩散过程中的梯度限制值,当梯度大于限制值时,此时的信号分散能力较弱。
c.由式(3)可知,异性扩散算法在边缘度量参数附近发生共边-异变[7],称之为阶梯效应。此时汽车后桥螺旋锥齿轮中包含的噪声信号与整体信号的梯度相似,所以将自适应算法引入到边缘度量参数中,得到更新后的度量参数,公式为
(4)
式中:g′为更新后的信号边缘度量参数;c为控制下的调节参数;Z为自适应算法;n1、n2分别为自适应区域φ1、φ2中的信号点数量。
d.利用改进后的信号边缘度量参数g′,使噪声信号在其对应区域内的比重无限降低,完成汽车后桥螺旋锥齿轮振动信号的降噪。公式为
(5)
2 齿轮畸变信号特征提取
针对降噪后的汽车后桥螺旋锥齿轮振动信号,本文利用曲线矩阵回波算法提取出汽车后桥螺旋锥齿轮畸变信号的特征[8],具体步骤如下:
a.降噪后的汽车后桥螺旋锥齿轮振动信号降低了自身的稀疏性与无限性。当齿轮表面发生畸变时,畸变会在其表面产生散射波,此时采用畸变散射算法计算出散射波的散射幅值,进而得到畸变信号的回波特性[9],公式为
(6)

b.由式(6)可知,畸变信号的精确定位需要提取畸变位置处的三维信息[10]与回波幅值。本文采用曲线矩阵回波算法对畸变信号进行定位,得到阵元与畸变位置之间的距离,公式为
(7)
式中:Dp为阵元中心与畸变位置之间的距离;tp为畸变波传递速度。
c.分别以发射阵元与接收阵元为圆心,阵元与畸变位置之间的距离为半径绘制出2个圆。2个圆具备2个交点,畸变信号位置点的坐标(z,r)即为交点的平均值,计算公式为
(8)
式中:M为交点。
d.得到汽车后桥螺旋锥齿轮的畸变信号位置点后,根据畸变信号位置点的坐标可以提取出畸变信号的特征,公式为
(9)
式中:G为提取的汽车后桥螺旋锥齿轮的畸变信号特征。
3 齿轮畸变控制
根据上述提取的汽车后桥螺旋锥齿轮畸变信号特征,本文采用重采样畸变控制技术对汽车后桥螺旋锥齿轮畸变进行控制,具体步骤如下:
a.利用相控阵超声技术采集汽车后桥螺旋锥齿轮的振动信号时,由于信号与相控阵之间具有相对运动,所以在提取的畸变信号特征中存在多普勒效应[11],位置如图2所示。

图2 多普勒效应位置
多普勒效应的频率变化公式为
(10)
式中:e为畸变信号特征的接收频率;e0为齿轮信号的声源频率;v1、v2分别为声源与信号的传输速度;w为信号的不同介质;ε、γ均为声源与信号之间的夹角变量。
b.当汽车后桥螺旋锥齿轮运动时,提取的畸变信号特征以速度v沿着直线方向运动,设声波在空气中的传播速度为s,则可以计算出多普勒效应的表达公式,即
(11)
式中:E为马赫数。
c.由式(11)可知,提取的畸变信号速度与马赫数[12]存在一定关系,当信号的相应速度越大时,马赫数偏大;当信号的相应速度越小时,马赫数偏小。由于马赫数与角度变量可以同时获取,由此可以得到畸变信号的频偏曲率。
d.将汽车后桥螺旋锥齿轮畸变信号的频偏曲率er分成m份,设每等分的大小为Φ,当分数足够大时,该区间内的频偏曲率值较少,并且不同分数都具备相同的数值。公式为
(12)
e.在Φ中取一个中点值替换所有的频偏曲率值,并且在这个范围中,畸变信号都是按照该频偏曲率发生变化。重采样畸变控制技术采用畸变信号特征最大值与频谱信号之间的相关系数[13]来确定Φ值,公式为
(13)
式中:B为方差计算;u为相关系数;e1为重采样的畸变信号频谱。
f.在重采样过程中,以上一个采样点为基准点,再次计算出下一个采样点的位置与采样时刻,然后通过插值算法[14]得到新采样点的采样值,公式为
(14)
式中:y1、y2分别为上一个采样点与新采样点;ΔT为采样间隔;ΔT1、ΔT2分别为上一个采样点与新采样点之间的时间间隔;μ1、μ2分别为信号波长。
g.完成所有齿轮畸变信号的重采样后,将新采样数据按照原采样率计算出信号频谱,获取到最接近原始信号的真实非线性频谱[15],进而得到校正后的相关参数,完成汽车后桥螺旋锥齿轮的畸变控制。
4 实验与分析
为了验证本文提出的基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法的整体有效性,选取大众汽车后桥螺旋锥齿轮为实验对象,对其进行测试。
首先通过相控阵超声传感器采集汽车后桥螺旋锥齿轮的振动信号,相控阵超声传感器设备如图3所示。

图3 相控阵超声传感器设备
实验参数设置如表1所示。

表1 实验参数
通过相控阵超声传感器获取的汽车后桥螺旋锥齿轮振动信号,如图4所示。

图4 齿轮振动信号
根据图4可知,获取的汽车后桥螺旋锥齿轮振动信号存在2处畸变,需对其进行齿轮畸变控制。
将汽车后桥螺旋锥齿轮畸变控制效果与畸变控制精度作为评价指标,采用本文提出的基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法、文献[2]方法、文献[3]方法和文献[4]方法做对比测试。
4.1 畸变控制效果
利用本文方法、文献[3]方法和文献[4]方法对图4的汽车后桥螺旋锥齿轮畸变实行控制,控制效果如图5所示。

图5 不同方法的畸变控制效果
分析图5可知,针对汽车后桥螺旋锥齿轮的畸变控制,本文方法控制后的齿轮信号波动稳定,并且控制后不存在畸变现象;文献[3]方法控制后的齿轮虽然右侧恢复正常,但左侧依旧存在畸变现象;文献[4]方法控制后的齿轮在左右两侧的畸变控制效果不明显。说明本文方法的畸变控制效果强于文献[3]方法和文献[4]方法的控制效果。
4.2 畸变控制精度
相控阵超声传感器将得到的齿轮振动信号通过采集卡输入到采集系统软件界面,经过计算后得到不同时间点对应的齿轮畸变控制误差。
将各方法控制后的齿轮畸变误差绘制出来,对比不同方法的畸变控制误差。误差越大,表明方法的控制精度越低;误差越小,表明方法的控制精度越高。不同方法的测试结果如表2所示。
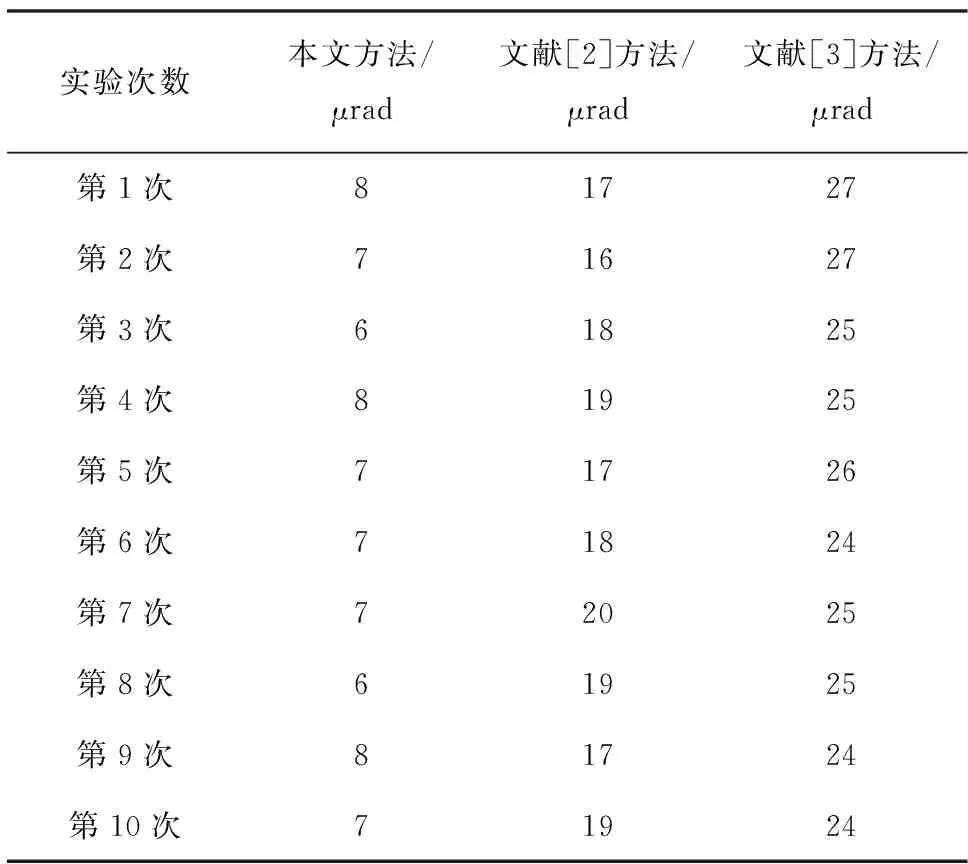
表2 3种方法的齿轮畸变控制误差
分析表2可知,随着实验次数的增长,控制误差呈上下波动,针对汽车后桥螺旋锥齿轮畸变的控制,本文方法的控制误差在8 μrad及以内;文献[2]方法与文献[3]方法的控制误差分别在20 μrad和27 μrad及以内。通过对比可以发现,本文方法的控制误差均小于文献[2]方法与文献[3]方法的控制误差,说明本文方法的汽车后桥螺旋锥齿轮畸变控制精度高于文献[2]方法与文献[3]方法的控制精度。
综上所述,本文方法的汽车后桥螺旋锥齿轮畸变控制效果较好,控制精度较高。这是因为本文方法在对汽车后桥螺旋锥齿轮畸变控制前,采用了相控阵超声技术采集了齿轮的振动信号,并采用异性扩散算法剔除了信号中的噪声,避免噪声对畸变控制结果产生影响,进而提高了本文方法的畸变控制效果。
5 结束语
目前,汽车后桥螺旋锥齿轮的畸变控制方法存在控制精度低、控制效果差等问题。为此,本文提出基于相控阵超声的汽车后桥螺旋锥齿轮畸变控制方法。该方法首先采用相控阵超声技术采集齿轮的振动信号,并用异性扩散降噪法剔除其中的噪声,其次采用曲线定量算法提取汽车后桥螺旋锥齿轮畸变信号的特征,最后采用重采样法获得控制后的相关参数,完成汽车后桥螺旋锥齿轮的畸变控制。实验结果表明,本文方法控制后的齿轮与原始齿轮一致,且控制精度较高。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
电子制作(2019年24期)2019-02-23
山东冶金(2018年5期)2018-11-22
电子测试(2018年15期)2018-09-26
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年6期)2016-11-07
纺织导报(2014年9期)2014-10-31