基于激光视觉的鞋底喷胶路径生成方法研究
2024-04-22 09:27林泽敏袁清珂郑倍松刘辉
机械工程师 2024年4期
林泽敏,袁清珂,郑倍松,刘辉
(广东工业大学 机电工程学院,广州 510006)
0 引言
鞋底上胶是鞋类生产过程中最为重要的工序之一,上胶效果的好坏直接决定了鞋子的质量[1]。目前,对鞋底的涂胶一般采用人工作业的方式。手工涂胶的方式存在着一些明显的缺点:首先,涂胶的位置和涂胶的用量由操作工人决定,操作工人的熟练程度直接决定了涂胶的质量。此外,在涂胶过程中,胶水挥发出的气体对工人的健康造成严重的影响[2]。因此,实现鞋底的自动化涂胶非常重要。
在科学技术进步的推动下,工业机器人在喷胶方面的应用也越来越成熟[3]。将工业机器人应用在鞋类喷胶上,将有效提高产品的质量,减少胶水挥发出的气体对人体的伤害,降低劳动力成本[4]。
实现喷胶工序的自动化关键在于喷胶路径的自动生成。针对这一问题,Kwon等[5]提出了一种可以根据鞋底的轮廓自动生成喷胶路径的方法。该方法简单直观,但提取的喷胶路径是一条平面曲线,只适用于平面鞋底。Kim[6]提出了一种基于鞋底的三视图自动生成喷胶路径的方法。该方法虽然适用于不同鞋底,但需要在不同的平台实现,操作复杂,且精度难以保证。
针对上述问题,本文提出了一种新的基于激光视觉生成鞋底喷胶路径的方法。使用线激光三维扫描仪扫描鞋底,对采集到的鞋底深度图进行研究。
1 图像预处理
1.1 鞋底深度图
利用线激光三维扫描仪采集到的鞋底深度图像如图1所示。图像中像素点的像素值与鞋底实际高度成正比例关系。

图1 深度图
1.2 平滑处理
由于获取的图像中不可避免地会出现一些噪声,因此需要对噪声进行消除,保留图像的原始细节特征。噪声的存在会干扰图像的有效信息,如果处理不好会影响后续的图像处理和分析[7]。中值滤波既能有效消除噪声,也可以较好地保护图像边缘的细节,所以选择中值滤波进行平滑处理。
中值滤波通过选择一定形式的窗口在图像的各点上移动,对窗内的像素灰度值进行排序,用排序中间值代替窗中心点处的像素灰度值[8]。对采集到的鞋底图像进行中值滤波处理,为了更加清楚地展示滤波效果,通过三维数据显示中值滤波处理后的结果,如图2所示。

图2 去噪效果图
2 鞋底内边缘提取
鞋底内边缘是指鞋底内侧面与鞋底外侧面的交线,由鞋底边缘区域的最高点组成。在鞋底自动化喷胶处理中,喷胶不能超出鞋底内边缘(是鞋底的边界线),对鞋底喷胶的定位有重要作用。
2.1 边缘检测算法
图像中的边缘是像素灰度值发生加速变化而不连续的结果。边缘可以粗略地分为阶梯状边缘和屋顶状边缘[9]。阶梯状边缘,它两边的像素灰度有明显的突变,是由最大梯度方向的一阶方向导数的极大值点所组成的集合。屋顶状边缘,它位于像素值从增加到减少或由减少到增加的变化转折点,可由一阶方向导数的零交叉点确定。
鞋底内边缘类似于屋顶状边缘,则可以用基于一阶导数的边缘检测算子进行检测。基于一阶导数的边缘检测算子有Roberts算子、Prewitt算子、Sobel算子等[10]。
Roberts算子根据对角元素的差来近似偏导数。表达式如式(1)和式(2)所示:
其卷积模板为:
Prewitt算子和Sobel算子是在Roberts算子的基础上改进,使得Prewitt算子和Sobel算子的近似比Roberts算子的近似更精确,采用3×3卷积模板,如下所述。
1)Prewitt算子卷积模板:
2)Sobel算子卷积模板:
如图3所示,是各种算法算子(Roberts算子、Prewitt算子、Sobel算子)所提取边缘轮廓的图像。
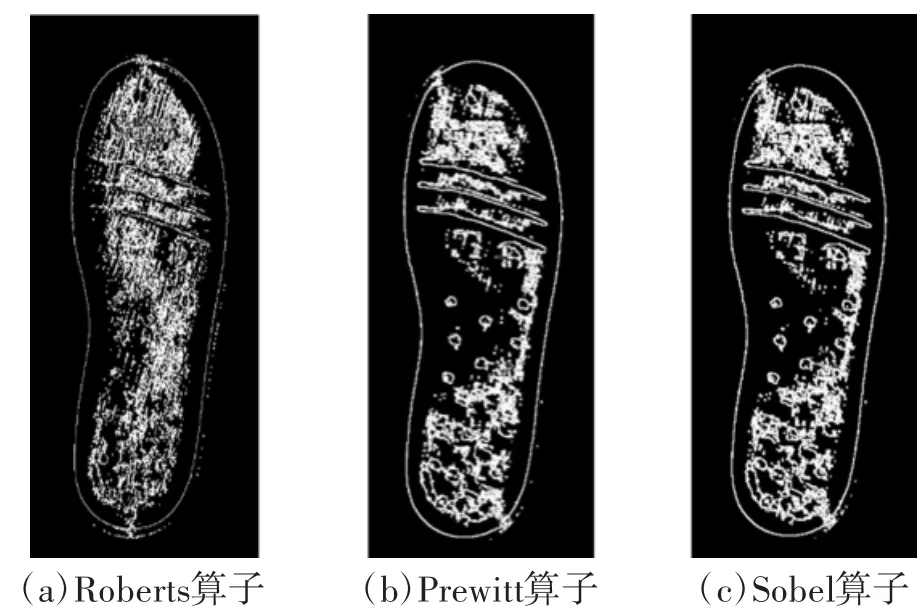
图3 边缘检测效果对比图
2.2 分区最大值算法
如图3所示,图像提取的边缘并不好,没有完整地提取出需要的鞋底内边缘。同时,仍有大量无用信息,需要额外处理,因此本文提出了一种分区最大值算法用于鞋底内边缘提取,算法的基本流程如图4所示。算法具体描述如下:1)外边缘轮廓提取。利用Moore边界追踪算法进行鞋底外边缘轮廓提取。2)获取质心。通过质心定位算法获取鞋底外边缘轮廓的质心。3)提取内边缘点。通过建立分区,搜寻像素最大值的方法提取鞋底内边缘点。4)插值获取内边缘。利用三次NURBS插值算法获取平滑的内边缘。
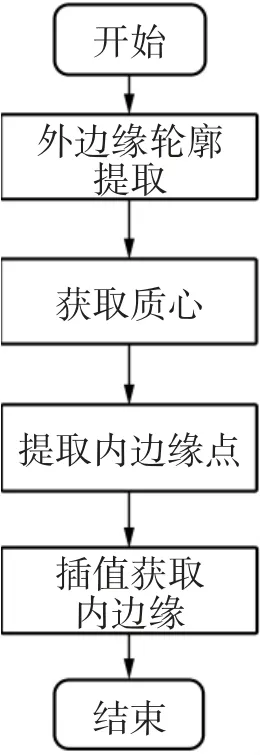
图4 算法流程
2.2.1 提取鞋底外边缘轮廓
Moore边界追踪算法[11]是提取图像中边界信息的一种算法。基本思想如图5所示,算法的步骤如下:1)找到一个黑色像素P,并将它定为起始像素(将从网格的左下角开始扫描像素,直到遇到一个黑色的像素,将其作为起始像素)。2)当遇到黑色像素P时,将P设置为当前边界像素点。3)原路返回到先前到达的白色像素,以顺时针方向搜索P的摩尔邻域内的每一个像素,直到遇到下一个黑色像素。4)重复步骤2)和步骤3),直到第二次进入起始点与第一次进入的方向相同时算法停止。
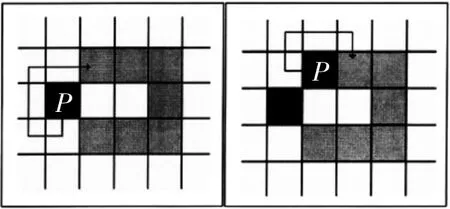
图5 Moore边界追踪算法的追踪过程
在整个运行过程中走过的黑色像素就是目标的边界像素。
利用Moore边界追踪算法获取到的鞋底外边缘轮廓如图6所示。
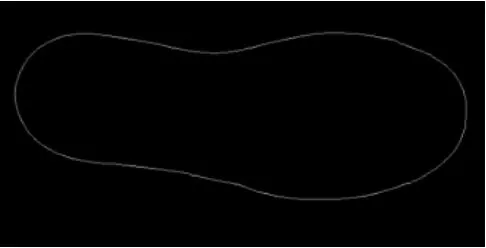
图6 外边缘轮廓提取
2.2.2 获取鞋底外边缘轮廓的质心
通过质心定位算法[12]获取鞋底外边缘轮廓的质心,假设质心为I(X,Y),鞋底外边缘轮廓点的坐标分别为Q1(X1,Y1),Q2(X2,Y2),Q3(X3,Y3),…,Qn(Xn,Yn),质心的坐标计算公式为
式中:Xi为点的横坐标,Yi为点的纵坐标。
如图7所示,交叉线的中心为外边缘轮廓的质心。
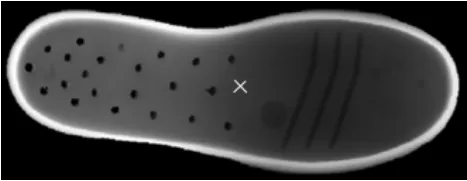
图7 外边缘轮廓的质心
2.2.3 提取内边缘点
取鞋底外边缘轮廓点Qi(i=1,2,…,n)与鞋底外边缘轮廓的质心I构建直线段Li(i=1,2,…,n),搜索各直线段Li上像素值最大的点pi(i=0,1,…,n)加入内边缘点集P。
由此可以得到离散的内边缘点,如图8(b)所示。

图8 分区极值法获取内边缘点
2.3 插值获取内边缘
为了获得精度较高的喷胶路径,需要对离散的内边缘点进行插值处理,以获得平滑的内边缘线。
利用三次NURBS插值算法[13]对离散的内边缘点进行插值。三次NURBS曲线的表达式为
式中:u为NURBS曲线的自变量;di(i=0,1,…,n)为NURBS曲线的控制顶点;wi为控制顶点的权因子,w0>0,wn>0,其余wi≥0,而且连续k个权因子不能同时为0;Ni,3(u)是三次规范B样条基函数,由节点矢量U=[u0,u1,…,un+4]决定。
Ni,3(u)满足如下递推关系:
利用积累弦长参数化法[14]对内边缘点pi(i=0,1,…,n)参数化得到节点矢量U。
对于C2连续的三次NURBS闭曲线,其首末数据点重合,所以三次NURBS闭曲线的控制顶点的反算公式为
其中:
由式(8)和式(9)即可求得控制顶点di(i=0,1,…,n-2)。
根据节点矢量和控制顶点,就可以得到所求的内边缘曲线。
3 喷胶路径的生成
理想的喷胶路径应该是鞋底内边缘线向鞋底内侧偏移得到的偏移曲线。
可以通过曲线等距偏移算法[15]对鞋底内边缘线进行偏移,得到鞋底喷胶路径。曲线等距偏置算法表达式为:
式中:D0(u)为偏移后的喷胶路径曲线,D(u)为鞋底内边缘曲线,d为偏移距离,N(u)为鞋底内边缘曲线法矢量,D′(u)为鞋底内边缘曲线的一阶导数,D″(u)鞋底内边缘曲线的二阶导数。
通过上述分析,将得到的坐标数据点进行分析处理,得到的鞋底内边缘和喷胶路径如图9所示。
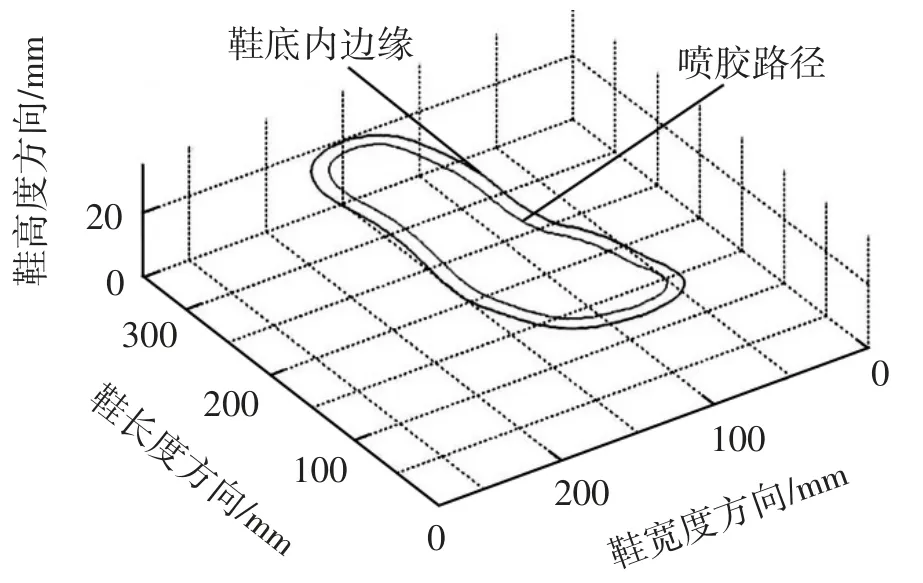
图9 鞋底内边缘和喷胶路径
4 系统结构
喷胶系统硬件上主要由ABB六轴工业机器人、工控机、PLC、光电开关、线激光视觉扫描仪,传送带等几个部分组成。系统结构的组成如图10所示。
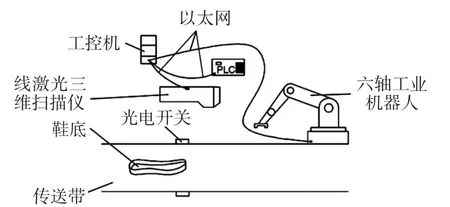
图10 系统结构组成
系统工作原理可简述为:鞋底在传送带上运动,当鞋底经过光电开关时,光电开关会产生脉冲信号并传送给PLC,触发PLC输出信号,控制线激光三维扫描仪进行拍照取图,进而在工控机上进行图像处理,以提取喷胶路径。得到喷胶路径并发送给工业机器人,当鞋底随传送带移动定长到达喷胶工位后,控制工业机器人喷胶。
5 试验与分析
试验借助ABB系列工业机器人完成鞋底的喷胶工作。将喷枪安装在机械手末端,控制ABB机器人按获取到的喷胶路径喷胶。从喷胶试验结果图11(b)中可以看出,鞋底内边缘没有胶水溢出,鞋底内部一周喷胶均匀,满足制鞋工艺鞋底黏合要求;同时,本文提取喷胶路径算法所用时间为1.23 s左右,符合实际生产需求。

图11 鞋底喷胶试验
6 结语
本文提出了一种自动生成鞋底喷胶路径的方法。利用线激光三维扫描仪获取鞋底深度图,采用中值滤波方法对鞋底深度图进行预处理。利用边缘检测算法对鞋底深度图像进行分析。与边缘检测算法相比,分区最大值算法提取的内边缘轮廓更好。最后,通过将得到的内边缘曲线偏置得到喷胶路径。通过机器人喷胶试验,验证了该方法的有效性和可行性。该方法能有效地获取喷胶路径的三维信息,适用于不同型号的鞋底喷胶路径生成,操作简单,通用性强。
猜你喜欢
军事文摘(2023年16期)2023-09-04
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2020年1期)2020-12-25
文萃报·周二版(2020年7期)2020-04-17
制造技术与机床(2019年11期)2019-12-04
当代陕西(2019年11期)2019-06-24
计算机工程(2015年4期)2015-07-05
航天器工程(2014年5期)2014-03-11
河南科技(2014年24期)2014-02-27