
基于改进RTK 算法的铁路导航精密单点定位优化
2024-04-19 13:57刘洋
电子设计工程 2024年8期
刘洋
(国能铁路装备有限责任公司,北京 100001)
全球导航卫星系统具有全方位、全天候、全时段、高精度的特征,已经在地理位置服务方面得到了广泛应用。目前,卫星导航在我国轨道交通安全定位方面的应用主要包括导航应用、控制测量、变形监测等,而导航应用则以测速、定位为主。目前中国铁路运营管理过程中主要通过卫星来确定列车位置,利用地面上转发器对累计误差进行修正,实现列车定位。为了保证定位精度,在轨道附近设置多个转发器,以消除累积误差,确保定位的准确性。由于部分地区位置偏远,地理环境条件差,无法满足实时定位的要求。为了解决这个问题,文献[1]提出了基于分区综合改正数定位方法,选择15 个测站作为参考站,统计GPS 双系统组合动态精密单点定位精度,以此实现车辆定位;文献[2]提出了模糊度固定技术的定位方法,构建双频非组合相位小数周偏差估计模型,采用静态和动态模糊度固定求解方式获取定位结果。然而,上述两种方法受到周跳数据的影响,导致定位结果不精准。因此提出了基于改进RTK 算法的铁路导航精密单点定位优化方法,主要通过求解载波相位整周模糊度固定问题,实现单点定位优化。
1 基于改进RTK算法的定位模型构建
利用非差码和载波相位观察方法,通过不同观测组合方式获取初步定位结果,定位原理如图1所示。
RTK 定位技术的关键在于固定载波相位,但是其定位结果存在一定的误差,因此该文采用固定模糊技术对RTK 进行了改进[3]。改进后的RTK 算法原理如下:
设状态向量为x=(ar,vr,C),其中,ar表示第r个移动站位置参量;vr表示第r个移动站速度参量;C表示载波的整周模糊度[4]。由于移动站存在n颗卫星,使用卡尔曼滤波方法对整周模糊度进行线性化处理,这一过程的观测矩阵为:
式中,D表示偏导矩阵;λ表示载波波长[5]。这一过程的状态转移矩阵为:
式中,K3×3表示第3 行3 列转移因子;m表示行数。基于改进RTK 算法的定位模型可表示为:
式中,ξr表示第r个移动站测量噪声,由此获取初步定位结果[6-7]。
2 铁路导航精密单点定位优化
2.1 单点数据预处理
在铁路导航精密单点定位过程中,通过使用载波相位和伪距观测方式进行单点定位[8-10]。伪距测量准确性不高,不能实现高精度定位;GPS 采用载波相位法具有很高精确度[11]。但与伪距观测值相比,观测结果存在着模糊性和周跳问题。因此需要先对其进行预处理,剔除野值点,并对周跳数据进行检测与修正[12]。因此,利用双频载波相位测量方法来检测电离层残差的周跳[13]。主要是根据各阶段电离层残差的变化来确定周跳,则同历元双频载波的相位观测结果存在以下差别:
式中,β1、β2分别表示不同的双频电离层残差系数;φ1(t)、φ2(t)分别表示不同的双频历元[14]。历元之间的电离层残差为:
一般情况下,历元之间的电离层残差是一个比较理想的周跳量[15]。虽然选取历元数量偏少,但在加入小量周跳数据的情况下,当接入两个历元间的周跳接近频率比时,发现无法探测出周跳,说明电离层残差存在一定缺陷,对该缺陷进行相关处理,由此完成单点数据预处理。
2.2 一阶电离层延迟消除
已知最大的误差来源是电离层延迟,它对位置误差的影响可达50 m。所以,一般都是通过联合观测来降低电离层的延时。最常用的是利用双频电离层抵消技术来消除一次电离层的延时[16]。铁路导航波段观测量计算公式可表示为:
式中,S1、S2分别表示铁路导航在l1、l2波段的观测量;α1、α2分别表示不同波段的观测频率。消除一阶电离层延迟后铁路导航波段的载波相位观测量计算公式为:
2.3 定位优化流程设计
局部模糊度固定技术主要是通过去除一些要被固定的模糊度,并重新确定剩下的模糊度,以此提升定位精度。因此,采用局部模糊化固定技术对初步定位结果进行优化,优化流程如下:
步骤1:采集浮点数,并对其进行线性插值处理,可得到不同模糊度下的铁路车辆位置坐标。浮点聚集示意图如图2 所示。

图2 浮点聚集示意图
由图2 可知,浮点聚集通过取消整数化操作,保留小数,采用双线性内插法获得了一个具有浮点坐标的位置坐标。图2 中的取样点是4,说明每一个导航精确的单位格被分成四个小方块。
步骤2:用递归方法求出了每个历元的位置浮点解,获取全部单差整周模糊度的浮点解。
步骤3:在模糊度不小于3 的情况下,通过浮点法求解位置坐标,获取一个固定的坐标,从而实现历元定位。通常情况下,由于位置坐标的浮点求解精度不高,所以要对定位结果进行优化,因此需要将单差整周模糊度的浮点解转换成双差整周模糊度的浮点解,其表达式如下:
式中,I表示单双差转换矩阵;i表示历元数。载波相位整周模糊度固定问题求解结果为:
式中,Z为实数;R′表示双差整周模糊度浮点解。
步骤4:如果所保持的模糊数量不低于固定坐标系中速度向量之和,那么转入步骤3;反之,当这个历元的位置坐标是浮点解时,这个历元的定位就完成了,以此实现铁路导航精密单点定位优化。通过局部模糊度固定技术对定位结果进行优化,使得整个周期中的载波相位不发生变化,从而提高了定位的准确性。
3 应用性能分析
3.1 实验装置
为了验证该文所设计的基于改进RTK 算法的铁路导航精密单点定位优化方法的有效性,进行了相关实验测试,实验装置如图3 所示。

图3 实验装置
图3 中接收器天线型号是NAVAN2004T,并且已经包括在天线相位校正文档中。基准系统是NovAtel 的SPANProPak6 GNSS 接收器,它们的相对位置是确定的。
3.2 基站分布设置
选择了8 个连续运行的基准站作为参考站,其位置分布如图4 所示。

图4 基站分布设置
在服务端,对8 个基准站进行了静态和动态的测试。在静态测试中,将两台北斗海达高精度GNSS接收器分别置于两个相邻的已知位置。在动态测试中,将两台北斗海达高精度GNSS接收器装在车顶,测量两台RTK的间距,并对其进行了动力学测试。
3.3 相对偏移实验数据分析
在实验过程中,对静态和动态测试数据进行了4 个多小时的收集。由于某些历元存在观测信号的丢失,导致无法实现精确的单点定位。对其中的1 h进行了精密单点定位,得到的实验数据如表1 所示。
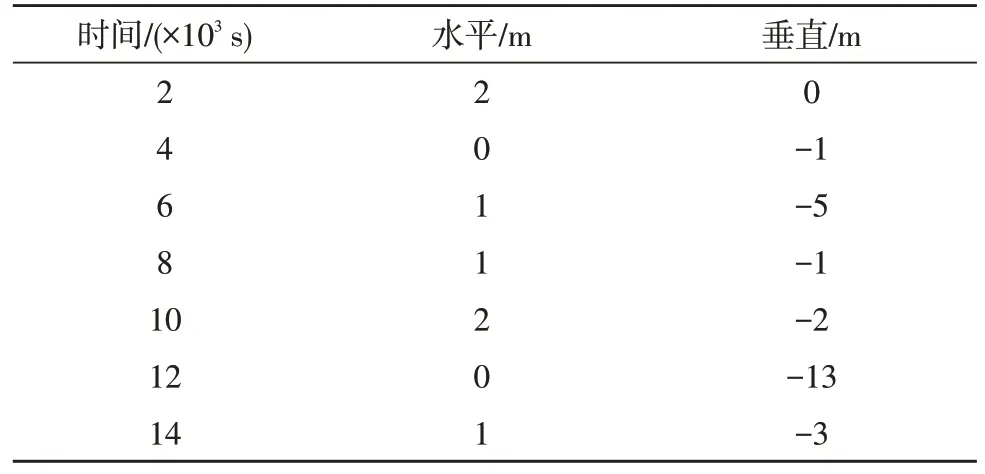
表1 相对偏移实验数据
实际中要求水平相对偏移在2 m 以内,垂直相对偏移在13 m 以内。
3.4 实验结果与分析
针对单点定位结果,分别使用文献[1]方法、文献[2]方法和所研究方法对相对偏移进行对比分析,对比结果如图5 所示。

图5 相对偏移对比分析
由图5 可知,文献[1]方法在相对偏移时间为6×103s的情况下,存在最大为9 m 的水平误差和10 m的垂直误差;文献[2]方法在相对偏移时间为6×103s的情况下,存在最大为8 m 的水平误差,0 m 的垂直误差;所研究方法在相对偏移时间为6×103s 的情况下,存在最大为2 m 的垂直误差,0 m 的水平误差,说明该方法的定位精度更高。
4 结束语
针对现有单点定位方法受到卫星导航系统单一等多种因素的不利影响,导致定位结果不精准的问题,提出了基于改进RTK 算法的铁路导航精密单点定位优化方法。单点定位的关键在于利用载波相位进行模糊定位,但是由于导航卫星故障和使用环境的变化,使得其定位精度不高。为了解决这个问题,将局部模糊固定技术应用到RTK 定位过程中,以此获取更为精准的定位结果,通过实验验证了该方法的有效性,因此这一方法可以在铁路导航精密单点定位领域得到广泛应用。
猜你喜欢
测绘学报(2022年5期)2022-05-31
导航定位学报(2022年2期)2022-04-11
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
中国惯性技术学报(2020年2期)2020-07-24
铁道通信信号(2019年4期)2019-10-10
雷达学报(2017年6期)2017-03-26
导航定位学报(2015年2期)2015-06-05
