
空投物出舱过程运动参数影像测量方法研究
2024-04-18 02:40张亚葛胡小英
电视技术 2024年2期
张亚葛,胡小英
(西安工业大学,陕西 西安 710021)
0 引言
空中投放以其准确性、突然性、远程机动等特点,成为各国在应对各种危机以及突发事件中优先使用的手段。空投空降是指从运输机上投放并使用降落伞等将相关人员和重要物资投送到目标地点的一种技术。运输机的空投空降系统试飞科目,需要关注飞机各舱门的开启关闭状态。在运输机空投装备或大量货物时,容易导致飞机质心位置连续后移,重心可能会超过全机焦点,将使飞机稳定裕度减小,飞行品质和操纵特性发生很大变化。因此,在运输机空投飞行中要保证飞行的安全,需要考虑货物的移动轨迹与运动速度。同时,货物出舱速度也会影响空投的精确度。
目前,试飞测试影像测量方法主要有光电经纬仪交会测量和摄影相机交会测量。光电经纬仪体积较大,适用于在地面测量飞机的航迹参数。摄影相机交会测量应用于物品投放等空中试飞科目,相机安装位置距离目标有足够的纵深,采用两台相机进行双站交会测量就可以满足测量需求。
1 测量系统设计
1.1 测量场构建
飞机舱内可供相机机械安装的位置有舱前壁、舱左右侧壁等,且高度不能高于舱内吊车轨道。相机安装位置距离待测量货物较近,最近距离仅为1 ~2 m,而货物移动待测轨道长度则较大,待测视场范围广。要测量货物的三维移动轨迹,应采用8-高分辨率摄影相机组合交会进行摄影测量。舱内相机分布及各相机视场范围示意,如图1 所示。
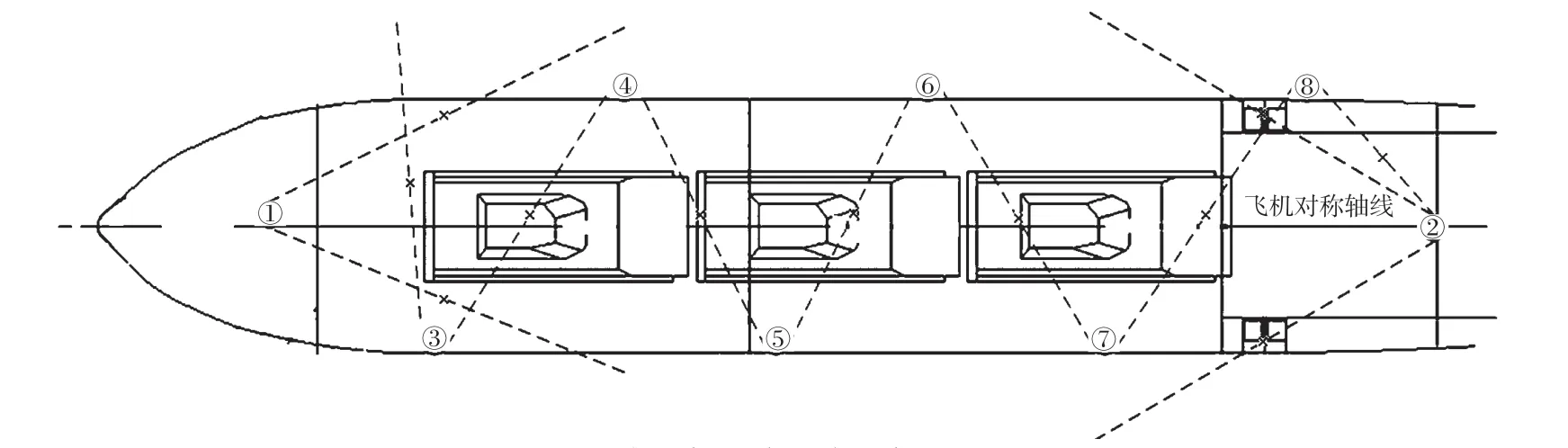
图1 舱内相机分布及各相机视场范围
图1中,1号相机与3~5号相机进行交会测量,2 号相机与6 ~8 号相机进行交会测量,测量区域覆盖全部货舱货物的移动轨道。
1.2 系统设计
测量系统包括8 部高分辨率测量摄影相机、2 台高分辨率视频信号采集记录器,测量原理如图2所示。高分辨率测量摄影相机用于获取货物运动的视频,高分辨率视频记录器用于记录视频数据,视频数据与机载全球定位系统(Global Positioning System,GPS)时间同步,视频数据经网络传输至脉冲编码调制(Pulse Code Modulation,PCM)编码下传[1]。

图2 高分辨率测量原理
2 测量方法
2.1 相机的标校
摄影相机的精确标校在工程应用中一般分为内标定和外标定两个过程。空投货物体积较大,在移动过程中会出现测量相机只能覆盖部分货物表面的情况。为了确保被覆盖货物表面具有测量标志,需要在货物四周粘贴编码标志点,每个编码标志点使用全站仪标定坐标。在8-高分辨率摄影相机组合交会测量场内,每件货物具有单独的可区分的编码标志组合。在货物移动过程中,每段交会测量场内拍摄的货物标志与前后测量场内的货物标志有较好的连续性[2]。
2.2 数字影像标志点图像判读
2.2.1 自动判读流程
为了提高测量精度,需要实现亚像素的图像判读,由于获取的图像较多(通常每次测量达到几千帧),还需要实现自动判读的功能。标志点判读流程如图3 所示。

图3 标志点判读流程
2.2.2 序列图像标志点跟踪精确定位
在基于特征点的相机标定技术中,对标志点位置的精准检测直接影响最后的计算精度,因此该检测精度是摄影测量中的关键性问题。依次通过图像处理、标志点定位和编码点识别,获取编码点的编码和标志点中心的图像坐标,作为后续计算的基础[3]。
2.2.3 复杂背景条件下的图像处理方法
编码标志点的定位过程主要包括灰度化、二值化、边缘提取和中心坐标计算。对于复杂环境条件下的编码标志,需要研究有效的二值化算法,准确区分背景与目标。针对该测量场,拟采用以下3 种方法最大限度提高目标提取的精确度[4]。第一,背景简化方法。采用接近编码标志背景色的布或其他材料覆盖货舱内背景复杂的区域,操作难度大,对飞行的影响有待评估,不能全区域覆盖。第二,视场规避方法。对视场进行调节,规避容易引起误判的背景近景拍摄。第三,算法优化。采用区域二值化算法分割图像,为每个区域选取最优阈值。
3 试验验证
3.1 模拟测量场构建
模拟测量场由3 台高分辨率摄影相机与1 台高分辨率视频采集记录器组成,相机布置于高处拍摄货物,拍摄角度为40°~60°,拍摄位置与拍摄角度均模拟机上实际情况。1 号相机分别与2 号、3 号相机构成交会测量场,地面放置纸箱作为模拟货物,在其四周表面粘贴编码标志,同时在地面粘贴编码标志作为消抖控制点[5]。
3.2 测量相机标校
采用编码标志标校架在各相机视场内进行旋转移动,标校测量场内相机的内方位元素,标定结果见表1。

表1 测量场各相机内方位元素标定结果
3.3 数据处理
推动纸箱若干次以获得实验数据,经数据判读与计算后得到模拟货物的运动参数数据。由于在地面移动,设Y方向位移为零。模拟投放物轨迹如图4 所示。

图4 模拟投放物轨迹
3.4 精度分析
3.4.1 误差源分析
影响测量精度的主要因素有测量相机的安装位置、相机与机体的连接稳定性、相机消抖计算误差、基准坐标校准误差、相机检校误差和影像标志点提取误差。在相机安装布局时,尽量保证交会角相对较大,这样有利于提高测量精度。同时,保证相机与机体之间的安装精度及刚度,减少相机与机体之间的相对位移,消抖控制基准点目标的数量、分布区域大小以及基准本身的稳定性等将对最终的结果产生影响[6]。
试验中通过相机获得被测部件的运动影像,需要进行事后的影像标志点精确提取和解算,得到各标志点的影像坐标。由于标志点的提取坐标误差会对最终的测量结果产生影响,实际测量解算中采用亚像素中心点的提取方法,能够实现小于1 个像素的精确判读,在进行精度估计时可假设判读误差为1 个像素[7]。
3.4.2 测量精度估算
从计算结果中随机抽取几个编码标志点的坐标,对它们进行点-点的距离计算,然后对比全站仪的测量结果,获得位移误差。通过计算,最大误差为1.5 mm。飞行试验中图像像素当量放大3 倍,考虑部分标定误差、人为误差等因素后,实际测量精度优于5 mm,满足空投货物运动参数的测量需求。
4 结语
根据某型飞机货物空投运动参数的测量需求,分析测量目标特性,建立8-高分辨率摄影相机组合交会测量场,研究了测量场基于组合标定的摄像机位姿解算方法,并对测量理论进行试验验证与精度分析。结果证明,该测量方法可以满足空投货物运动参数的测量需求。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29
纺织科学研究(2023年9期)2023-10-23
雷达学报(2020年3期)2020-07-13
当代水产(2019年1期)2019-05-16
测控技术(2018年12期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
太空探索(2016年9期)2016-07-12
太空探索(2015年8期)2015-07-18
浙江大学学报(工学版)(2015年1期)2015-03-01
计算机工程与设计(2014年9期)2014-12-23
