基于单片机的无人机导航与控制系统设计
2024-04-18 01:38:38元倩倩
装备制造技术 2024年2期
安 洋,张 涵,元倩倩
(焦作师范高等专科学校,河南 焦作 454000)
0 引言
随着微电子技术和人工智能技术的不断创新和发展,促使无人机技术迅速发展,已成为国内外众多科研人员的研究焦点[1,2]。与传统载人飞机相比,无人机不需要考虑飞行员等因素,没有驾驶舱,从而无人机整体结构尺寸较小,使其运动更加灵活,配合智能控制系统,能够显著提高其机动性能。这种能力使无人机能够在各种危险环境中自主执行复杂的任务,消除了传统任务中人员伤亡的风险,并大大降低了飞行成本。无人机有许多类型,根据其设计特点,商业化的无人机可分为三种类型,分别是扑翼、固定翼和旋翼类型[3]。无人机是非线性、高度耦合和复杂的欠驱动系统,有多个输入和输出,由自检装置、自控装置和执行器等组成。虽然其结构和工作原理相对简单,但包含了各个学科和领域的复杂知识,这也使得其飞行姿态特殊化,形成了具有个性特征的动力学,如何设计一个具有稳定特性的系统,为系统设计一个稳定可靠的控制器一直是个难题[4]。
四旋翼无人机的控制量是4 个旋翼的旋转速度ωi(i= 1,2,3,4),输出量包含6 个状态变量,分别是空间位置(x,y,z)和机身倾角(φ,θ,ψ)。四旋翼无人机的输入转速被转换为四通道上的虚拟控制量,用以控制不同坐标轴上的6 个自由度,其关系如下:U1为z轴方向上升力,U2为横滚力矩,U3为俯仰力矩,U4为偏航力矩。因此,它要实现的是一个具有多变量、强耦合和欠驱动的复杂控制目标,同时自身还容易受到系统的干扰和不确定性的影响,这些特点使得设计一个高效的飞行控制系统变得非常困难。
为了实现无人机的准确导航和稳定控制[5],本文以单片机为基础,设计了一种基于单片机的无人机导航与控制系统。主要是根据无人机的飞行任务和要求,确定系统的功能需求,并设计相应的导航算法和控制策略。
1 单片机的基本选型与应用
采用MS1030 外围电路,它是杭州瑞盟科技股份有限公司研发的一款针对超声波流量的高精度测量电路,它的测量精度最高可以达到15ps,在使用4 MHz外部高速时钟的情况下,它的测量范围为500NS~4MS,它的稳定性也非常好。在第一波模式情况下,内部比较器的offset 可编程范围为±127 mV,而且还另外增加了±64 mV 的比较偏置电压。MS1030 单向测量顺流或逆流回波时,最高可检测8 个脉冲,检测完毕后将8 个脉冲以及脉冲累加值放入顺逆流结果寄存器,方便单片机的调用。
流量测量模块是由模拟前端、数字TDC、运算器(ALU)这三部分组成。MS1030 内部集成了高精度的温度测量单元,测量原理是通过PT1000 温度传感器以及参考电阻对电容的放电时间进行测量,通过参考电阻的阻值以及放电时间换算出PT1000 温度传感器的电阻值,从而精确计算出温度。
2 基于PID 的无人机导航与控制系统设计
2.1 PID 控制原理
PID 控制是传统控制工程中最基本和最广泛使用的控制,因为它结构简单,使用方便,稳定可靠。在工业生产中,PID 控制也是一种被广泛使用的控制方式,只要PID 参数的选取合适,就能得到较好的控制效果。在模拟控制系统中,PID 控制是最常用的控制方法,其结构如图1 所示。

图1 PID 控制结构
在图2 中,r(t)代表输入设定值,c(t)代表输出实际值,e(t)=r(t)- c(t)是被控系统输入端的偏差值。该控制器的原理是:首先将输入和反馈信号之间的偏差作为新的输入变量,将比例值P、积分值I和微分值D,通过线性组合转换为被控变量并控制系统,使被控变量始终接近设定值。
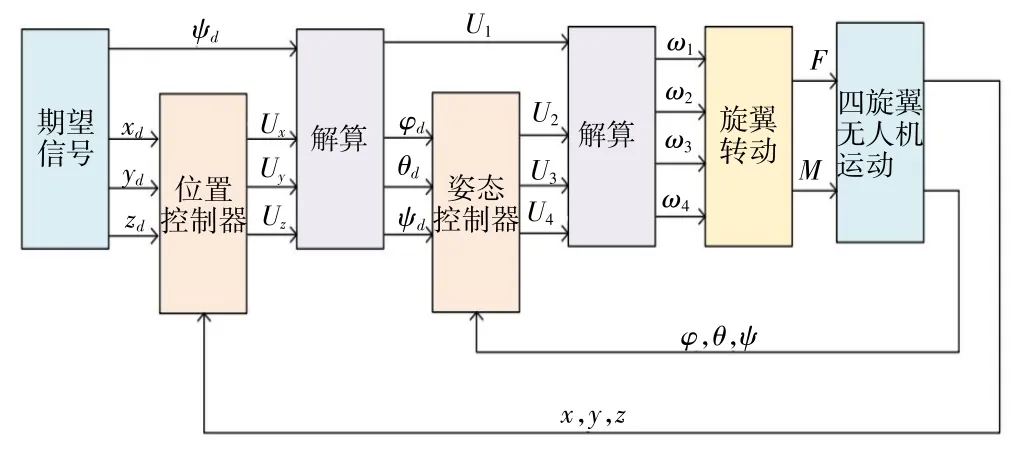
图2 四旋翼无人机控制结构
式中,KP表示的是比例因子,TI表示的是积分因子,TD表示的是微分因子。
2.2 改进模糊PID 控制器
经典的PID 控制适用广泛,但PID 控制器的三个参数总是通过试验和误差来确定。因此,虽然它适用于可以建立精确的数学模型的线性时不变控制系统,动态特性也比较稳定,可以提高控制精度,满足系统要求。但应用于四旋翼无人机控制系统时,它有明显的缺点:一方面,仅依靠一套固定的PID 参数,对于具有快速时间变化和非线性特性的高度耦合系统来说,往往不是很理想;另一方面,无人机的实际工作环境通常是在室外,经常会受到外部干扰,而传统的PID 控制器对扰动的抗性较差。因此,为了实现四旋翼的稳定控制,有必要对常规PID 控制器进行改造,采用一些实时PID 参数整定方法来满足非线性控制的要求。
随着先进控制算法的改进,基于智能控制算法的自适应参数调节方法逐渐兴起,在复杂的非线性控制中取得了较为满意的性能,进一步提高了控制精度。在这种参数调节方法中,KP、KI 和KD 的值可以随误差变化而变化。该方法无需对被控对象进行准确的数学建模,且参数可在任意时刻进行计算与调节,从而实现更好的控制。根据控制系统的参数变化、强干扰、强耦合等问题,在闭环控制中采用了智能控制中的模糊控制与PID 控制共同作用的方法,实现了对飞行过程中PID 参数的实时调节。
2.3 基于改进模糊PID 的无人机导航控制系统
无人机的控制器由同样由3 个控制通道组成,即横滚通道、俯仰通道和偏航通道,每个通道都采用一个PID 控制器。通过计算得到的期望横滚角以及无人机的当前横滚角作为横滚通道的输入,并以虚拟控制量U2作为横滚通道的输出。在俯仰信道中,输入为所得到的期望俯仰角d以及无人机的当前俯仰角,输出为一个虚拟控制量U3。在偏航通道中,以期望的偏航角及当前的偏航角为输入,以虚拟控制量U4为输出。系统的3 个方位角的偏差被确定,3 个通道的虚拟控制量经PID 控制器输出,并传送到四旋翼无人机的控制模型。 四旋翼无人机控制结构如图2 所示。
3 系统测试与分析
在MATLAB/Simulink 环境中,结合无人机系统参数以及设计的内外环PID 控制策略,搭建四旋翼无人机系统模型并进行仿真试验,根据经验法,经过大量仿真测试和一系列参数整定,选定外环x、y、z三方向基础位置PID 参数值分别为[8,0.01,3],[9,0.01,3],[8,0.01,3];内环横滚、俯仰、偏航基础姿态角PID 参0.5 数值分别为[12,2,15],[15,2,13],[9,3,12]。搭建位置控制器、控制器。
无人机从初始位置开始向期望位置运动的过程中,随着姿态角发生改变,开始产生力与力矩,从图3中可以看出,在PID 控制下,无人机x轴方向受力范围在[-0.88,2.93] N,y轴方向受力范围在[-2.29,2.88] N,z轴方向受力范围在[7.62,18.15] N;横滚轴力矩范围在[0.26,1.56] N·m,俯仰轴力矩范围在[-1.19,0.21] N·m,偏航轴力矩范围在[-0.14,0.133] N·m。在25 s 处加入小幅阶跃扰动后,经过4 s 左右调整后渐趋稳定。从转速曲线中可以看出,在PID 控制下,无人机运动过程中,4 个旋翼转速开始波动幅度较大,无人机可能出现较大晃动,不够稳定,但最终转速均能稳定在420 rad/s 附近。

图3 基于PID 的无人机转速曲线
从图4 模糊PID 位置控制曲线可以看出,F-PID控制在x方向上最大偏差量为0.16 m,响应时间为16.4 s,在y方向上最大偏差量为0.19 m,响应时间为19.3 s,在z方向上最大偏差量为0.14 m,响应时间为5.2 s。模糊PID 控制最大偏差量横滚角为0.20 rad,俯仰角为0.26 rad,且F-PID 控制曲线更加平滑,幅度更小,经过波动后,渐趋稳定。同时,在稳定阶段加入小幅阶跃干扰后,经过3 s 左右调整后渐趋稳定。
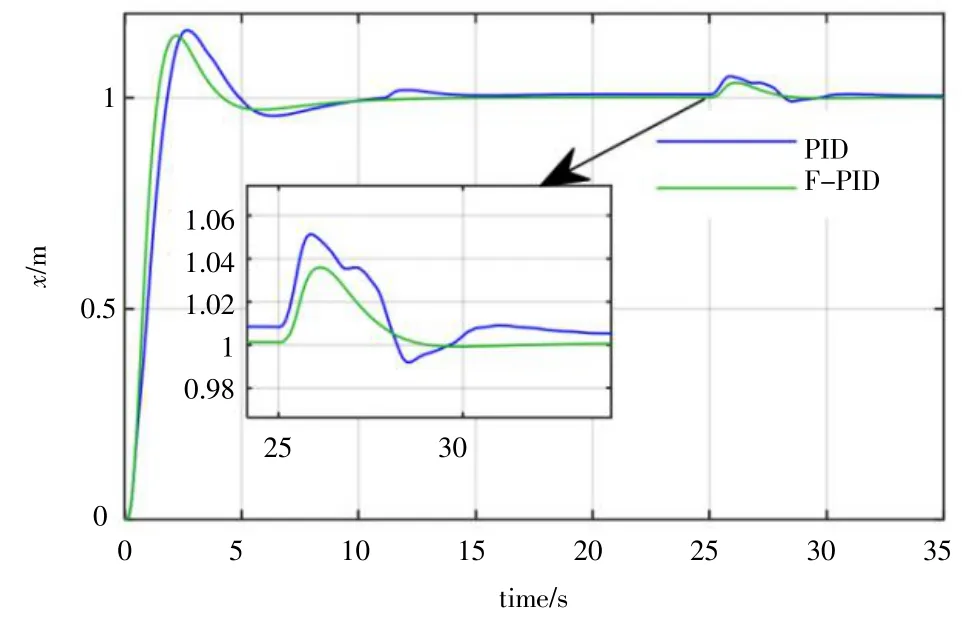
图4 模糊PID 位置曲线
4 结语
无人机作为一种新型飞行器具有广泛的应用前景,但要实现精确和复杂的导航与控制系统,需要高度准确的技术支持。因此,研究和设计无人机导航与控制系统,能够提高无人机的控制精度和稳定性,为无人机的自动化飞行和任务执行提供更可靠的技术保障。通过对单片机的应用研究,设计了一种基于单片机的无人机导航与控制系统。该系统能够实现无人机的准确导航和稳定控制,具有良好的性能和稳定性。未来可以进一步研究和改进这一系统,以满足更高级别的无人机导航与控制需求,推动无人机技术的快速发展。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
电子制作(2019年9期)2019-05-30 09:41:48
山东青年(2016年12期)2017-03-02 18:22:48
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
系统医学(2016年8期)2016-02-20 02:55:08