公路养护机械设备远程监控与操作系统设计与实现
2024-04-18 01:38:28查雪兵
装备制造技术 2024年2期
查雪兵
(甘肃省张掖公路应急保障与路网监测中心,甘肃 张掖 734000)
0 引言
公路养护在维持交通运输网络顺畅运行和保障道路安全方面发挥着至关重要的作用。随着交通流量的不断增长和交通网络的日益复杂化,高效且安全的公路养护成为了当务之急[1]。在这一背景下,远程监控和操作系统的引入,为公路养护提供了一种创新的管理方式。这类系统能够实时监控公路状况和养护设备的运行,同时远程操作功能减少了现场作业人员的风险,特别是在恶劣天气或危险环境下[2]。通过实时数据收集和分析,这些系统还能够优化养护计划和资源配置,提高公路养护的整体效率。因此,本文设计和实现一套高效的远程监控与操作系统,不仅能够显著提升公路养护的工作效率和响应速度,还能极大地增强作业的安全性。这一系统的开发和应用,不仅可以减少因道路状况不佳或养护设备故障引起的交通事故,还可以通过减少现场作业人员的需求,降低人力成本和潜在的安全风险[3]。此外,该系统还有助于提高公路养护的预测性和主动性,从而更有效地应对复杂多变的公路环境。总而言之,本研究的目标是通过设计和实施一个高效的远程监控与操作系统,为公路养护领域提供了一种新的技术解决方案,对于提升公路养护作业的智能化水平具有重要意义。
1 系统的总体设计
1.1 系统需求分析
系统设计聚焦于构建一个集成化的监控框架,该框架能够实现对公路养护机械设备的实时数据监控和远程操作控制[4]。设计内容包括远程数据采集系统,用于搜集设备运行状态的关键数据;实时数据传输系统,确保采集的数据及时传送到监控中心;数据处理与分析系统,应用大数据算法对数据进行处理,以识别潜在的设备故障或操作异常。
在本系统设计中,设定了三个核心目标:实时数据监控、远程操作控制和系统稳定性与安全性。实时数据监控的核心在于确保快速准确地收集和传输设备运行数据,其实时性算式为:
实时性算式的原理基于实时系统的响应时间,其中响应时间是指系统对输入进行处理并产生输出所需的时间总和。在(1)式中,F代表数据的采集频率,这是决定系统能多快捕捉到设备状态变化的因素之一。D表示数据从源头到目的地的传输延迟,这个延迟包括了网络传输和信号传递的时间。Tp是数据处理时间,涉及数据在达到系统后进行分析和处理所需的时间。整体而言,算式旨在通过优化这3 个参数来减少整体的响应时间,从而提高系统的实时监控能力,确保公路养护机械设备的运行状态能够被实时准确地监控和评估。
远程操作控制允许操作人员在安全的远程位置控制机械设备,降低作业风险并提高作业效率。系统稳定性和安全性则通过平均无故障时间(MTBF)评估,其算式为:
其中,T是总运行时间,N是故障次数。
该指标反映了系统的可靠性和长期稳定运行的能力,确保了数据和操作的安全。这些目标共同构成了一个高效、可靠且安全的系统,旨在提升公路养护效率并保障操作人员安全。
1.2 系统的整体框架
本系统的架构设计致力于实现公路养护机械设备的高效远程监控与操作。核心组成包括监控中心、数据传输网络、远程监控模块、远程操作模块、机械设备和用户界面。监控中心是系统的大脑,负责数据的集中处理和分析,包括数据分析单元、中央处理器和存储器等。数据传输网络则作为信息流动的动脉,确保从机械设备到监控中心的数据实时传输。远程监控模块和远程操作模块是系统的关键组成部分,前者负责实时采集和监测设备状态,如视频监控和数据采集,后者则使操作人员能够远程发送控制指令并接收设备反馈。机械设备作为执行单位,包括各类公路养护机械,通过高效的通讯连接到系统。用户界面则提供了一个直观的平台,供操作人员监控设备状态和执行远程操作。整个系统的设计旨在通过这些相互协作的模块,提高公路养护的效率和安全性,实现对养护作业的精确控制和管理。系统整体框架如图1 所示。
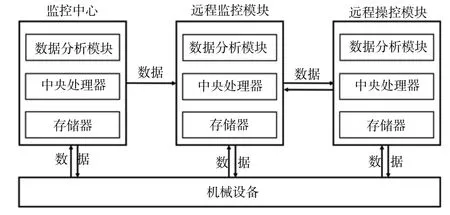
图1 系统整体框架
1.3 远程监控与操作系统主程序设计
现场终端数据采集单元嵌入式程序采用STM32CubeMX+Keil MDK 工具联合开发,选择STLINK V2 作为嵌入式应用程序的下载工具,程序采用模块化设计,使得程序可读性强,方便了软件的调试和后期的升级维护。根据嵌入式软件设计的需求,将程序划分为初始化模块、数据采集模块、数据处理模块、通信模块、数据存储模块等五个模块。主程序通过对各个模块的子程序的调用来完成整个嵌入式系统的功能设计。数据采集单元在上电后首先完成系统的初始化,接着进入循环,判断是否接收到数据采集命令或采集时间间隔是否满足,若是,则进行数据采集、数据处理并进行上传,上传成功后存储至本地SD 卡中,结束流程,见流程图2。

图2 主程序工作流程
2 远程监控模块设计
2.1 数据采集
数据采集在远程监控模块中占据核心地位,负责实时收集机械设备的关键运行参数。这包括温度T,速度v,以及位置坐标(x,y,z)。这些参数的实时监测依赖于一系列传感器,热电偶传感器安装于发热部件附近,通过测量由温度变化引起的电压差来实时监测温度。速度传感器固定在移动部件上,捕捉设备的位移并计算速度。GPS 模块则固定在设备的外部,实时提供地理坐标信息。所有传感器的数据输出需要经过A/D 转换器转化为数字信号,并通过无线网络实时传输至中心监控系统,后端系统根据Nyquist 定理设定合适的采样频率,以确保信号的准确重建。通过这样的方案,系统能够实现对公路养护机械设备的实时、准确监控。
温度数据通过热电偶传感器来传递,其算式为:T=aV +b,其中,V为电压,a和b为校准常数。
速度通过速度传感器进行数据传递,其算式为:
其中,△s为位移变化,△t为时间变化。
位置则通过GPS 系统提供。数据采集遵循Nyquist 采样定理,确保信号无失真地重建,即采样频率fs应满足:
其中,fmax是信号中的最高频率。此外,采集的数据通过适当的滤波算法进行优化,以提高数据的质量和准确性。
2.2 监控界面
监控界面是用户与系统交互的重要部分,设计上注重直观性和实用性。界面展示实时数据和历史数据分析,如温度时间序列图T(t)和位置热图。历史数据分析通过统计方法平均值和标准偏差,其算式为:
通过该算式可以揭示长期趋势和潜在问题。
此外,用户界面响应时间Tr是性能的关键指标,其计算式为:
其中,Tproc是数据处理时间,Ttrans是数据传输时间。界面设计遵循人机工程学原则,最大化易用性和减少操作疲劳。
远程监控模块的设计通过这些高度技术化和学术化的方法,确保了数据的准确采集、高效传输和直观展示,为公路养护机械设备的远程监控提供了坚实的技术基础。
3 系统测试与分析
为了全面评估开发的远程监控和操作系统的性能及可靠性,进行了一系列详细的测试。这些测试旨在验证系统的关键功能,包括数据采集的准确性、控制命令的传输效率,以及整体系统的稳定性。表1 详细记录了这些测试的具体结果,包括单元测试、集成测试和系统测试的数据,以提供对系统性能的全面了解。

表1 系统测试结果
这些结果不仅证明了系统在技术层面的成熟,也为其在公路养护领域的实际应用提供了坚实的基础。
4 结语
公路养护机械设备的远程监控与操作系统,经过一系列细致的测试,在关键性能指标上均表现优异,包括传感器的高准确性、数据处理的高效率、控制命令的低延迟、通信的高稳定性以及整体系统的卓越稳定性和响应速度。特别值得注意的是,系统在高负载下依然保持了稳定的性能,显示出其强大的实际应用能力。这些测试结果不仅验证了系统的技术可行性,也为其在公路养护领域的应用奠定了坚实基础,预示着系统能够在提升公路养护效率和安全性方面发挥重要作用。总体而言,本研究为公路养护领域的现代化和智能化提供了有效的技术解决方案,展现了广泛的应用前景。
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
英语文摘(2021年11期)2021-12-31 03:25:18
汽车维修与保养(2021年12期)2021-03-08 09:33:24
小学生学习指导(低年级)(2019年11期)2019-11-25 07:31:46
汽车维修与保养(2019年4期)2019-09-11 05:48:58
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
学生天地(2018年19期)2018-09-07 07:06:30
作文周刊·小学一年级版(2017年5期)2017-07-29 02:35:52
作文周刊·小学一年级版(2017年5期)2017-07-29 02:33:00
设备管理与维修(2016年7期)2016-04-23 06:51:37