贝叶斯优化与集成学习在弹载雷达目标识别中的应用
2024-04-18 04:47张攀博高静吴元伟
航空兵器 2024年1期
张攀博 高静 吴元伟


摘 要: 空空导弹在打击低空、 超低空目标时, 弹载雷达区分目标和杂波的性能下降。 本文针对弹载雷达目标识别问题, 应用多种集成学习算法和贝叶斯优化算法, 建立了多个目标识别模型, 测试并对比了模型性能。 通过特征提取、 数据标准化和特征选择, 构建了优选特征的目标杂波数据集。 使用贝叶斯优化算法进行调参, 构建了XGBoost、 LightGBM和CatBoost目标识别模型并测试。 测试结果表明, XGBoost、 LightGBM、 CatBoost的目标识别效果优于随机森林、 支持向量机和AdaBoost。 选择XGBoost、 LightGBM和CatBoost和随机森林为基分类器, 构建了Stacking目标识别模型并测试。 测试结果表明, Stacking的目标识别准确率达到98.88%, 优于组成它的四个单一模型, 但运行效率大幅降低。 综合来看, CatBoost的目标识别准确率达到98.03%, 虽不是最优, 但其测试时间为0.011 s, 运行效率的优势更明显。
关键词: 弹载雷达; 目标识别; 贝叶斯优化; 集成学习; XGBoost; LightGBM; CatBoost; Stacking
中图分类号: TJ760
文献标识码: A
文章编号: 1673-5048(2024)01-0058-08
DOI: 10.12132/ISSN.1673-5048.2023.0049
0 引 言
空空导弹作为实现对敌压制对己支援的夺取制空权的关键武器装备, 对战争的胜负有着极大的影响[1]。 未来空战的作战环境愈发恶劣, 雷达型空空导弹在打击低空、 超低空突防的隐身战机、 无人机时, 弹载雷达的目标识别性能在一定程度上会被强地海杂波影响[2]。 弹载雷达下视工作时所面临的杂波通常都不是广义平稳的, 弹体飞行姿态、 擦地角、 地貌、 海情等因素都会影响杂波的分布特性, 使得自适应杂波抑制方法性能迅速下降[3]。 强烈的杂波会造成严重虚警, 抬高目标检测门限, 缩短弹载雷达的作用距离, 导致空空导弹命中率降低[4]。 因此, 进一步加强弹载雷达区分目标与杂波的能力, 对于提升空空导弹作战效能具有重要意义。
近年来, 以机器学习为代表的人工智能技术发展迅速, 彰显了其在军事领域的应用前景[5]。 针对空中威胁的智能目标识别技术, 通过仿真分析真实采集数据和专家知识构造具备多维特征的样本数据集, 实现对目标和杂波的特征学习与精准快速的区分, 为进一步提高空空导弹检测、 跟踪并毁伤目标的成功率提供新的技术方案与信息保障[6]。 因此, 使用机器学习的方法提升弹载雷达目标识别的能力, 是实现空空导弹智能化、 自主化的重要组成部分。
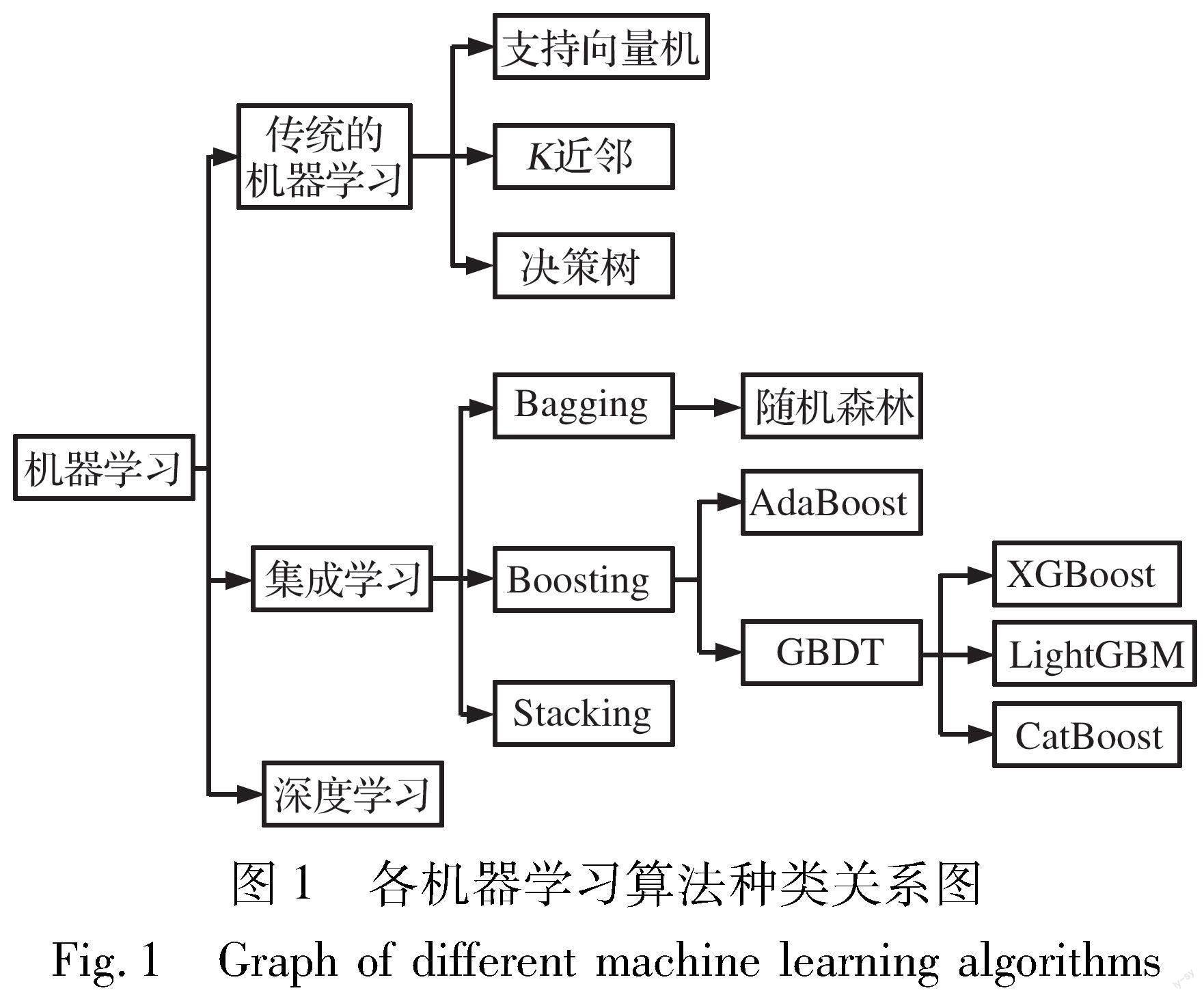
机器学习算法种类众多, 图1为各机器学习算法种类关系图。 目前, 針对舰载、 岸基等其他类型的雷达, 已经有机器学习方法应用于目标与杂波的区分问题, 但大多使用传统的支持向量机(Support Vector Machine, SVM)方法。 2007年, 文献[7]提出了一种基于改进支持向量机的海面目标检测方法, 在实测海杂波数据上进行了仿真实验, 验证了该方法较强的
目标检测能力和抗杂波性能。 2013年, 文献[8]提出了基于支持向量机的海面弱目标检测方法, 在低信杂比条件下仍能取得良好的检测性能。 2020年, 文献[9]构建支持向量机分类器, 在候选航迹层面区分真假目标, 取得了显著的虚警抑制效果。 但支持向量机方法在训练时需要在特征空间中计算样本点到分割超平面的距离, 计算量较大, 导致模型的训练时间和测试时间都较长, 且其在面对复杂的非线性问题时, 取得的识别精度不够高。
近几年, 开始有集成学习方法应用于雷达目标识别问题, 取得了优于支持向量机的识别精度, 证明了集成学习方法的优越性。 2020年, 文献[10]利用AdaBoost构建了杂波抑制模型, 较之于传统的支持向量机和K近邻分类器, 取得了更好的剩余杂波抑制效果。 2022年, 文献[11]引入随机森林构建海面小目标检测模型, 提升了雷达的检测性能。 2022年, 文献[12]提出了一种基于随机森林的雷达目标多维特征检测方法, 实现了精准鲁棒的雷达目标检测能力。 可以看出, 已有的基于集成学习的雷达目标识别方法, 多使用属于Bagging算法的随机森林和属于基础的Boosting算法的AdaBoost, 而仍属于集成学习范畴的Boosting算法XGBoost、 LightGBM和CatBoost, 以及Stacking模型融合方法, 应用研究较少。
综上, 本文将集成学习中Boosting算法XGBoost、 LightGBM和CatBoost, 以及Stacking模型融合方法应用于弹载雷达目标识别问题, 在算法训练时使用贝叶斯优化算法进行调参, 最终实现优于文献中的随机森林、 支持向量机和AdaBoost的目标识别性能。
1 研究方法
1.1 目标杂波数据集的建立
1.1.1 数据来源
为了尽可能得到满足真实对抗环境下弹载雷达目标识别需求的机器学习算法, 本文采用真实采集的飞机类目标回波数据和地杂波数据, 构建了弹载雷达目标杂波训练集、 验证集和测试集。 其中, 训练集用来训练机器学习目标识别模型, 需要的数据量相对较多, 验证集用来在使用贝叶斯优化对模型进行调参时验证模型性能并调整模型参数, 测试集全程不参与目标识别模型的训练与调整, 保证模型从未使用过测试集中的数据, 用来评价模型的目标识别性能, 验证模型的泛化性。
1.1.2 特征提取
特征空间决定了机器学习的上界, 是影响目标识别性能最关键的因素, 良好的机器学习分类器只是能够更加逼近这个上界[13], 因此选择目标与杂波差异性较大的特征作为候选特征非常重要。
单脉冲弹载雷达通过两个天线阵列的和差波束的比值来获得目标的角度信息。 设子天线阵1的输出为E1, 子天线阵2的输出为E2=E1ejΔφ, Δφ为两个通道的相位差。 由两个子天线阵的输出, 可以求得和通道与差通道的输出, 即
EΣ=E1+E1ejΔφ=2E1cos(Δφ/2)·ejΔφ/2(1)
EΔ=E1-E1ejΔφ=-2jE1sin(Δφ/2)·ejΔφ/2(2)
求差通道与和通道的输出之比:
因此, 在限定范围内, K(θ)会随着θ单调变化, 那么, 确定了K(θ)值, 就可以估算出目标偏离的角度值。
考虑到Δφ=LsinΔθ/λ为目标到天线的距离差带来的待测相位差, 可以得到待测相位差Δφ为
根据相位测角原理, 待测角度Δθ为
得到待测角度θ为
弹载雷达在自检时完成各通道的幅相补偿, 对目标检测时测量失调角的实部理论上为零; 而在杂波背景下, 地海面背景回波的离散叠加导致和差幅度相位的不一致, 分析其与目标测角特征的差异可以用于目标的识别。
另一方面, 弹载雷达的测角误差与信号强度满足以下公式:
式中: km为天线差波束归一化斜率; θ3dB为弹载雷达的3 dB波束宽度; S/N为积累后测角通道的信噪比。 由此可知, 弹载雷达测角的误差是与信号幅度强耦合的物理特征, 则信号幅度信息可以作为区分目标和杂波的依据。
综上, 可以根据单脉冲弹载雷达测量输出的失调角与幅度信息, 构建目标和杂波的特征空间。 具体地, 本文提取归一化幅度实部AR、 归一化幅度虚部AI、 Y路失调角实部YR、 Y路失调角虚部YI、 Z路失调角实部ZR、 Z路失调角虚部ZI共6类特征。 同时, 在雷达信号处理过程中, 会进行非相参积累, 对回波重复测量多次。 本文重复测量6次, 则每类特征得到6个测量值, 最终构成36个维度的特征向量: AR1-6、 AI1-6、 YR1-6、 YI1-6、 ZR1-6和ZI1-6, 作为候选特征数据集。
1.1.3 数据标准化
由于特征提取后得到的归一化幅度和失调角不在同一数量级, 直接组成训练特征集在后续机器学习模型中训练, 可能导致模型收敛速度慢, 准确率降低, 因此, 需要进行数据标准化。
常见的标准化方式有两种: 离差标准化和标准差标准化, 对序列x1, x2, …, xn标准化的转换公式如下:
考虑到离差标准化极易受个别异常值的影响, 本文采用标准差标准化。
1.1.4 特征选择
特征提取和数据标准化后得到的候选特征数据集, 如果直接输入模型进行训练, 可能会导致模型复杂度高, 训练时间长等问题, 甚至会降低模型准确率。 特征选择方法通过评估特征与类别标签之间的相关性, 对特征重要性进行定量分析, 删除低于设定阈值的无关特征, 降低机器学习算法训练时的计算复杂度, 减少模型运行时间, 提高算法准确性, 且有防止过拟合的作用。 本文使用基于随机森林基尼指数的特征选择方法。
随机森林在训练时, 使用CART节点分裂算法, 将根节点分裂为子树, 它在分裂时尽可能使基尼指数最小, 基尼指数越小, 代表该特征属性的分类能力越强。 因此, 基尼指数可以作为衡量特征重要性的一个指标[14]。 计算各候选特征的基尼指数, 设定某一阈值, 删去低于该阈值的特征, 得到特征重要性较高的优选特征, 实现特征选择的目的。
基尼指数计算公式如下:
式中: T为数据集; N为数据集中的类别个数; pn为样本点属于第n类的概率。
对目标杂波的候选特征数据集中的36个特征的重要性进行排序, 结果如图2所示。 由图可知, Z路失调角实部、 归一化幅度實部和归一化幅度虚部三类特征更有效。 因此选取ZR1-6、 AR1-6和AI1-6共三类18个特征作为目标杂波的优选特征数据集, 输入机器学习模型进行训练和测试。
1.2 贝叶斯优化算法
机器学习算法的超参数数量大都较多, 不同的超参数组合, 也会导致模型的准确性存在差异。 贝叶斯优化[15]基于变量的先验知识, 使用代理模型的后验概率分布构造用于平衡探索和开发过程的采集函数, 尽可能不漏掉未尝试区域中更好的超参数组合, 同时也能回避不必要的目标函数评估, 快速找到全局最优值, 是机器学习模型调参问题中较优秀的优化算法。
贝叶斯优化算法的关键是TPE代理模型和EI采集函数。 将TPE代理模型的后验分布作为搜索最优值的依据, p(y)表示其目标函数的风险分布, 其中, y的意义是风险值, p(xy)表示待优化参数的先验分布, 其中, {x1, x2, …, xk}表示超参数组合。 EI采集函数指出下一组试验的超参数组合, 最终找到最优超参数。 TPE代理模型建模时使用非参数密度模型, 可用式(11)描述:
式中: e(x)和g(x)分别是风险损失y=f(xi)小于y和大于y对应的观测值产生的密度。
TPE代理模型使用e(x)和g(x), 区分风险较小和风险较大的超参数集合, y的意义是当前观测风险值y的γ分位数, 即p(y 最大期望提升EI表示为 结合贝叶斯公式, 变形得到: 为了降低计算量, 上式进一步简化为 由式(15)可知, EI值反比于g(x)/e(x), 尽可能使e(x)的概率大, g(x)的概率小, 就能得到最大的EI值, 同时得到对应的最优超参数。 贝叶斯优化算法的流程如图3所示, 用5个步骤实现: (1)随机初始化含有5个超参数组合的集合{x1, x2, …, x5}; (2)用不同的超参数组合分别训练机器学习模型, 在验证集上进行预测, 并计算相应的AUC值{y1, y2, …, yi}, 构造初始的超参数与AUC值集合D; (3)基于集合D, 通过TPE树结构估计器拟合超参数组合x与AUC值y之间的对应关系, 建立TPE代理模型; (4)基于代理模型, 使用EI采集函数指出下一组需要评估的超参数xi+1; (5)检查是否达到迭代次数N, 若达到, 输出使EI值最大的超参数组合x并终止程序, 若没有达到, 将新指出的超参数组合xi+1添加至原超参数组合集, 重复步骤(2)~(4)直至达到迭代次数N后, 输出最优超参数组合x。 1.3 XGBoost算法 XGBoost是华盛顿大学陈天奇博士提出的一个基于GBDT的开源框架[16]。 XGBoost可以通过处理器的多线程实现并行运算。 传统的GBDT由于只计算一阶导, 在训练第n棵树时, 需要计算前n-1棵树的残差, 无法实现分布式。 XGBoost对损失函数做二阶泰勒展开, 此外还加入正则项求整体最优解, 实现损失函数的下降和模型的复杂度的平衡, 尽可能避免过拟合。 假设模型的决策树个数为k, 即 其损失函数为 1.4 LightGBM算法 LightGBM是GBDT的一种高效实现算法, 具有更快的训练速度、 更低的内存消耗等优点[17]。 LightGBM的原理是在拟合新的决策树时, 将当前决策树的残差近似值用损失函数的负梯度表示, 即在保持原模型不变的基础上, 在下一轮迭代中加入一个新函数到模型中, 使预测值进一步趋近真实值。 LightGBM在训练时, 模型的目标函数如式(18)所示, 需要寻找一棵合适的树fk使得目标函数的值最小。 式中: cK-1为前K-1棵树的正则惩罚项之和; yi为样本 1.5 CatBoost算法 同样作为Boosting算法的一种, CatBoost与XGBoost和LightGBM一样, 都是在GBDT的基础上改进而来的, 由俄罗斯搜索公司Yandex于2017年发布[20]。 此外, CatBoost主要从两方面对GBDT进行改进: 克服梯度偏差和解决预测偏移, 最终在降低过拟合风险的同时提高了算法精度, 并增强了模型的泛化性能。 首先, CatBoost为了克服梯度偏差引起的过拟合, 在计算样本梯度时通过构建下一棵决策树来进行拟合, 最终构造出s个随机排列的训练样本集; 计算每个随机排列的训练样本Xk的梯度值, 生成对应的模型Mk, 但并不依据该梯度值更新模型。 其次, CatBoost为了解决由目标信息泄露引起的训练集的Xk分布F(Xk)Xk与测试集X的分布F(X)X之间的预测偏移问题, 改进传统GBDT的梯度估计方法, 使用排序提升算法实现有序增强, 具体地, 对训练集进行随机排序, 对于每个样本只采用其前面的样本来训练模型, 得到模型后进而估计该样本的梯度并构建决策树, 使用所有样本来计算决策树的叶子节点值, 最终通过排序提升算法极大地减小了梯度估计的偏差, 抑制了预测偏移。 迭代中加入一个新函数到模型中, 使预测值进一步趋近真实值。 1.6 Stacking模型融合策略框架 Stacking是由Wolpert于1992年提出的一种模型融合的集成学习算法[21], 在Kaggle等数据科学比赛中常被用于进一步提升模型的性能, 与Bagging和Boosting算法不同, Stacking是一种异质性集成的模型融合策略框架。 Stacking的基本思想是将两层算法串联, 即第一层算法的输出作为第二层算法的输入。 第一层内部多个模型并联, 各自独立对输入样本集进行学习和预测, 称这些模型为基学习器; 第二层内部只有一个模型, 称之为元学习器。 第一层中包括多个基学习器, 要求每个基学习器的目标识别性能尽可能地“好而不同”, 这样基学习器之间可以优势互补, 提高模型性能, 同时, 为了进一步提升模型的泛化能力, 防止最终的Stacking模型对留出的固定验证集过拟合, 在第一层中又引入了K折交叉驗证。 具体地, 在Stacking目标识别模型实际构建过程中, 采用了4个模型作为基学习器, 并进行5折交叉验证。 Stacking的基本框架示意如图4所示。 1.7 评价指标 在测试集中测试目标识别效果并对比时, 需要定义衡量目标识别性能优劣的评价指标。 1.7.1 识别效果评价指标 准确率Acc, 即识别正确的数据点占总数据点的比例, 计算公式为 查准率P, 即识别为目标的数据点中, 实际为目标的数据点所占的比例, 计算公式为 查全率R, 即实际为目标的数据点中, 识别为目标的数据点所占的比例, 计算公式为 查准率和查全率是一对矛盾的指标, F1均值即为查准率和查全率的调和均值, 由下式计算: ROC曲线是一种评价模型综合性能的指标, 其y轴是真正率, x轴是假正率, 当区分正负两类样本的门限值变化时, 模型的真正率和假正率也随之变化。 理想的模型是真正率为1, 假正率为0, 因此, ROC曲线越接近左上角, 目标识别效果越好。 AUC值定义为ROC曲线下的面积, 是基于ROC曲线评估模型综合性能的定量指标, 衡量了在决策空间中, 正负两类样本的远离程度, 值越大, 目标识别效果越好。 1.7.2 运行效率评价指标 本文目标识别算法所使用计算机的处理器为AMD Opteron(TM) Processor 6274@ 2.20 GHz, 内存为192 G。 为了更可靠地评价算法的运行效率, 将同一个目标识别算法分别训练和测试5次并取平均值, 得到该算法的训练时间和测试时间, 作为算法的运行效率评价指标。 实际上, 模型训练后可以保存到本地, 应用时直接调用本地文件即可, 因此, 测试时间更为重要。 2 实验与分析 首先, 使用贝叶斯优化对3个Boosting弹载雷达目标识别算法XGBoost、 LightGBM和CatBoost进行调参, 得到最优超参数组合; 其次在测试集上测试XGBoost、 LightGBM和CatBoost的目标识别性能, 并与GBDT、 支持向量机、 随机森林和AdaBoost作对比; 最后从上述7个算法中选择XGBoost, LightGBM, CatBoost和随机森林作为Stacking的基分类器, 并测试Stacking的目标识别性能。 2.1 贝叶斯优化调参结果 XGBoost需优化的超参数及优化结果见表1。 LightGBM需优化的超参数及优化结果见表2。 CatBoost需优化的超参数及优化结果见表3。 XGBoost、 LightGBM和CatBoost是集成学习中3个先进的Boosting算法, 且都是在GBDT上改进而来的。 而支持向量机、 随机森林和AdaBoost是目前在雷达目标识别领域已有应用的3种机器学习算法。 因此, 这里分别构建了XGBoost、 LightGBM和CatBoost弹载雷达目标识别模型, 并与GBDT、 支持向量机、 随机森林和AdaBoost一同在测试集上测试, 对比模型性能。 测试结果见表4。 将表4可视化后, 结果如图5所示。 绘制各个算法的目标识别ROC曲线, 如图6所示。 记录各个算法的训练时间和测试时间, 见表5。 识别效果方面, 由表4和图5可知, 本文采用的分别基于XGBoost、 LightGBM和CatBoost的弹载雷达目标识别算法在5个评价指标上显著优于SVM和AdaBoost, 优于GBDT, 略优于随机森林; 其次, 在这3个Boosting算法中, XGBoost识别效果最好, 准确率达到98.32%, LightGBM次之, CatBoost最差, 準确率为98.03%, 三者的准确率相差不大。 由图6可知, XGBoost、 LightGBM、 CatBoost和随机森林算法的ROC曲线几乎重合且完全包裹AdaBoost、 GBDT和SVM, 同样说明本文采用的XGBoost、 LightGBM和CatBoost算法识别效果优于对比算法且三者间相差不大。 运行效率方面, 由表5可知, 6个集成学习算法的训练时间和测试时间都大幅小于支持向量机, 证明了集成学习相较支持向量机在识别效果和运行效率两方面的优越性; 其次, 在识别效果最好的3个Boosting算法中, LightGBM训练时间最短, 平均用时4.31 s, CatBoost测试时间最短, 对总量4 457个样本点进行识别, 用时0.011 s, 远远小于XGBoost的0.085 s和LightGBM的0.061 s, 运行效率优势明显。 综合考虑, CatBoost是弹载雷达目标识别的应用最优选。 2.3 Stacking性能测试与分析 Stacking模型融合算法需要确定基分类器, 且在基分类器选取时, 应遵循“好而不同”的原则, 即将效果良好的不同种类的算法组合起来更能充分发挥Stacking模型的集成效果。 由上述的实验结果可知, 7个算法中, XGBoost、 LightGBM和CatBoost弹载雷达目标识别算法识别效果最好, 从“好”的角度讲, 应被选为基分类器。 文献中提到的随机森林识别效果较XGBoost、 LightGBM和CatBoost略差, 但其优势是属于Bagging算法, 模型结构与XGBoost、 LightGBM和CatBoost有一定差异, 从“不同”的角度讲, 也应被选为基分类器。 最终, 选择XGBoost、 LightGBM、 CatBoost和随机森林作为Stacking的基分类器, 采用逻辑回归算法作为元分类器, 构建基于Stacking的弹载雷达目标识别算法, 并在测试集上测试。 测试结果见表6。 将表6的Stacking弹载雷达目标识别算法, 与表4的4个基分类器XGBoost、 LightGBM、 CatBoost和随机森林的识别效果评价指标绘制对比图, 如图7所示。 识别效果方面, 由图7可知, 虽然XGBoost、 Light GBM、 CatBoost和随机森林已经拥有较好的识别效果, 但以这4个模型为基分类器构建的Stacking模型, 仍然进一步提升了识别效果。 具体地, Stacking模型的查准率P为99.54%, 比4个基分类器中的最小值99.66%低了0.12%, Stacking模型的查全率R为97.25%, 比4个基分类器中的最大值95.46%高1.79%, 可以理解为Stacking模型牺牲了较少的查准率, 换来了查全率相对大幅度提高, 最终提升了综合性能, 在其他3个指标中, Stacking模型相较4个基分类器都有全面提升, 其中, 准确率达到98.88%, 相较4个基分类器中最优的XGBoost模型的98.32%提升了0.56%, 相较CatBoost模型的98.03%提升了0.85%。 运行效率方面, 由于Stacking模型采用双层结构, 且第一层中采用4个基分类器和5折交叉验证, 可以大幅增加训练时间和测试时间, 最终, Stacking模型的训练时间为311.21 s, 测试时间为1.846 s, 而CatBoost模型测试时间为0.011 s, 运行效率较CatBoost大幅降低。 综上, Stacking模型融合算法的目标识别效果优于组成它的单一模型, 但其测试时间远大于CatBoost, 可见其在弹载硬件平台上运行时很难满足实时性要求, 因此, CatBoost仍是弹载雷达目标识别的应用最优选。 3 结 论 将集成学习中的XGBoost、 LightGBM、 CatBoost和Stacking算法应用到弹载雷达目标识别问题中, 得到如下结论: (1) 在弹载单脉冲雷达目标识别问题中, Z路失调角实部、 归一化幅度实部和归一化幅度虚部的特征重要性明显高于Z路失调角虚部、 Y路失调角实部和Y路失调角虚部。 (2) XGBoost、 LightGBM和CatBoost算法的目标识别效果优于随机森林、 支持向量机和AdaBoost。 (3) Stacking算法的目标识别效果优于组成它的单一模型XGBoost、 LightGBM、 CatBoost和随机森林, 但运行效率大幅降低。 (4) CatBoost算法的目标识别效果虽不是最优, 但其运行效率的优势更明显, 是弹载雷达目标识别的应用最优选。 参考文献: [1] 樊会涛, 崔颢, 天光. 空空导弹70年发展综述[J]. 航空兵器, 2016(1): 3-12. Fan Huitao, Cui Hao, Tian Guang. A Review on the 70-Year Development of Air-to-Air Missiles[J]. Aero Weaponry, 2016 (1): 3-12.(in Chinese) [2] 郭玉霞, 刘功斌, 崔炳喆, 等. 空空导弹雷达导引头信息处理智能化思考[J]. 航空兵器, 2020, 27(5): 23-27. Guo Yuxia, Liu Gongbin, Cui Bingzhe, et al. Intelligentization of the Radar Guiding Technology of Air-to-Air Missile[J]. Aero Weaponry, 2020, 27(5): 23-27.(in Chinese) [3] 陈伟, 孙洪忠, 齐恩勇, 等. 智能化时代雷达导引头信号处理关键技术展望[J]. 航空兵器, 2019, 26(1): 76-82. Chen Wei, Sun Hongzhong, Qi Enyong, et al. Key Technology Prospects of Radar Seeker Signal Processing in Intelligent Age[J]. Aero Weaponry, 2019, 26(1): 76-82.(in Chinese) [4] 李海军, 王天然, 王一明. 中远距空空导弹超低空掠海反导作战运用分析[J]. 战术导弹技术, 2022(3): 131-136. Li Haijun, Wang Tianran, Wang Yiming. Analysis of the Application of Intermediate-Long Range Air-to-Air Missile in Ultra-Low-Altitude Sea-Skimming Anti-Missile Operations[J]. Tactical Missile Technology, 2022(3): 131-136.(in Chinese) [5] 鲜勇, 李扬. 人工智能技术对未来空战武器的变革与展望[J]. 航空兵器, 2019, 26(5): 26-31. Xian Yong, Li Yang. Revolution and Prospect of Artificial Intelligence Technology for Air Combat Weapons in the Future[J]. Aero Weaponry, 2019, 26(5): 26-31.(in Chinese) [6] 刘代军, 王超磊. 空空导弹智能化技术的发展与展望[J]. 航空兵器, 2019, 26(1): 25-29. Liu Daijun, Wang Chaolei. Development and Prospect of Air-to-Air Missile Intelligentization[J]. Aero Weaponry, 2019, 26(1): 25-29.(in Chinese) [7] 王宏强, 姜斌, 黎湘, 等. 基于改进支持向量机的海面目标检测方法[J]. 信号处理, 2007 (4): 598-602. Wang Hongqiang, Jiang Bin, Li Xiang, et al. The Method of Target Detection Based on Ameliorated SVM the Presence of Sea Clutter[J]. Signal Processing, 2007(4): 598-602.(in Chinese) [8] 田玉芳, 尹志盈, 姬光荣, 等. 基于SVM的海面弱目标检测[J]. 中国海洋大学学报, 2013, 43(7): 104-109. Tian Yufang, Yin Zhiying, Ji Guangrong, et al. Weak Targets Detection in Sea Clutter Based on SVM[J]. Periodical of Ocean University of China, 2013, 43(7): 104-109.(in Chinese) [9] 刘文, 李宏刚, 苗锋, 等. 基于ReliefF与SVM的雜波区虚假航迹抑制方法[J]. 指挥信息系统与技术, 2020, 11(2): 44-48. Liu Wen, Li Honggang, Miao Feng, et al. False Track Suppression Method in Clutter Area Based on SVM and Relief[J]. Command Information System and Technology, 2020, 11(2): 44-48.(in Chinese) [10] 林堅鑫, 沈学勇, 楼奇哲, 等. 基于AdaBoost的雷达剩余杂波抑制方法[J]. 电光与控制, 2020, 27(6): 53-57. Lin Jianxin, Shen Xueyong, Lou Qizhe, et al. An AdaBoost Based Method for Suppression of Radar Residual Clutter[J]. Electronics Optics & Control, 2020, 27(6): 53-57.(in Chinese) [11] 施赛楠, 杨静, 董泽远. 基于高维特征域随机森林的海面小目标检测[J]. 现代雷达, 2022, 44(3): 63-69. Shi Sainan, Yang Jing, Dong Zeyuan. Detection of Small Sea-Surface Target Based on Random Forest in High-Dimensional Feature Domain[J]. Modern Radar, 2022, 44(3): 63-69.(in Chinese) [12] 欧阳可赛, 黄中华, 于俊朋. 基于随机森林的雷达目标多维特征检测方法[J]. 现代雷达, 2022, 44(7): 38-42. Ouyang Kesai, Huang Zhonghua, Yu Junpeng. Method of Radar Target Detection Based on Radar Multi-Dimensional Feature Using Random Forest[J]. Modern Radar, 2022, 44(7): 38-42.(in Chinese) [13] Domingos P. A Few Useful Things to Know about Machine Learning[J]. Communications of the ACM, 2012, 55(10): 78-87. [14] 陈谌, 梁雪春. 基于基尼指标和卡方检验的特征选择方法[J]. 计算机工程与设计, 2019, 40(8): 2342-2345. Chen Chen, Liang Xuechun. Feature Selection Method Based on Gini Index and Chi-Square Test[J]. Computer Engineering and Design, 2019, 40(8): 2342-2345.(in Chinese) [15] Snoek J, Larochelle H, Adams R P. Practical Bayesian Optimization of Machine Learning Algorithms[EB/OL]. (2012-06-13)[2023-03-22]. https:∥arxiv.org/abs/1206. 2944.pdf. [16] Chen T Q, Guestrin C. XGBoost: A Scalable Tree Boosting System[C]∥Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, 2016: 785-794. [17] Ke G L, Meng Q, Finley T, et al. LightGBM: A Highly Efficient Gradient Boosting Decision Tree[C]∥ Advances in Neural Information Processing Systems, 2017: 3149-3157. [18] Jin R M, Agrawal G. Communication and Memory Efficient Parallel Decision Tree Construction[C]∥ Proceedings of the 2003 SIAM International Conference on Data Mining, 2003: 119-129. [19] Li P, Burges C, Wu Q. McRank: Learning to Rank Using Multiple Classification and Gradient Boosting [EB/OL]. (2008-01-01)[2023-03-22].https:∥www.microsoft.com/ en-us/research/wp-content/uploads/2016/02/boosttreerank.pdf. [20] Prokhorenkova L, Gusev G, Vorobev A, et al. CatBoost: Unbia-sed Boosting with Categorical Features[EB/OL]. (2017-06-28)[2023-03-22].https:∥arxiv.org/abs/1706.09516.pdf. [21] Wolpert D H. Stacked Generalization[J]. Neural Networks, 1992, 5(2): 241-259. Application of Bayesian Optimization and Ensemble Learning in Target Recognition of Missile-Borne Radar Abstract: When air-to-air missile strikes low and ultra-low altitude targets, the performance of missile-borne radar to distinguish targets and clutter is reduced. In this paper, aiming at the problem of target recognition of missile-borne radar, multiple target recognition models are established by using a variety of ensemble learning algorithms and Baye-sian optimization algorithm, and their performance is tested and compared. Through feature extraction, data standardization and feature selection, a target clutter data set with optimized features is constructed. The target recognition models of XGBoost, LightGBM and CatBoost are constructed and tested by using Bayesian optimization algorithm to adjusting the parameters. The test results show that the target recognition efficiency of XGBoost, LightGBM and CatBoost is better than that of random forest, support vector machine and AdaBoost. XGBoost, LightGBM, CatBoost and random forest are selected as base classifiers, and the target recognition model of Stacking is constructed and tested. The test results show that the target recognition accuracy of the Stacking algorithm is 98.88%, which is better than each of four models that constitute the stacking algorithm, but its operating efficiency is greatly reduced. In summary, the target recognition accuracy of CatBoost algorithm can reach 98.03%. Although it is not optimal, its test time is 0.011 s, and its operation efficiency is more obvious. Key words: missile-borne radar; target recognition; Bayesian optimization; ensemble learning; XGBoost; LightGBM; CatBoost; Stacking
猜你喜欢
大自然探索(2023年7期)2023-08-15
科学与信息化(2021年30期)2021-12-24
小学生学习指导(低年级)(2018年12期)2018-12-29
电子测试(2018年1期)2018-04-18
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
百科探秘·航空航天(2015年4期)2015-11-07
遥测遥控(2015年2期)2015-04-23