基于天塞主镜的多尺度长焦成像系统设计
2024-04-18 06:13:07刘飞太智超张敏洁相萌于纯邵晓鹏
航空兵器 2024年1期
关键词:高分辨率
刘飞 太智超 张敏洁 相萌 于纯 邵晓鹏


摘 要: 针对提升多尺度成像系统的分辨率以满足对远距离目标精确识别的需求, 从提升主镜焦距的角度出发, 本文提出一种基于天塞结构主镜的多尺度长焦成像系统设计, 分析了为满足次级镜头的线性排布而需要对主镜添加的两个约束条件, 针对次级镜头阵列中随离轴角增加使系统在对应视场成像质量下降的问题, 对邻近区域次级镜头进行协同优化, 同时在离轴位置次级镜头的优化中应用自由曲面面型完成像差校正。所设计系统不同视场区域成像的MTF曲线一致性较好, 表明系统在全视场范围内成像质量理想。采用天塞结构主镜设计的多尺度成像系统, 其空间分辨率达14 μrad, 相较于共心球透镜的多尺度系统有显著提高。
关键词: 多尺度系统; 高分辨率; 天塞结构; 长焦系统; 光学设计; 光电成像
中图分类号: TJ760
文献标识码: A
文章编号: 1673-5048(2024)01-0111-06
DOI: 10.12132/ISSN.1673-5048.2023.0106
0 引 言
光电成像设备持续以更大视场及更高分辨率来实现更多的目标场景信息的获取。多尺度成像系统因其兼顾大视场和高分辨率成像的特点而备受国内外研究者的关注[1-2]。多尺度成像与单镜扫描成像方式相比, 其对视场范围内的场景实时凝视成像, 可以满足动态拍摄的图像信息记录需求。相较于多探测器拼接的成像模式, 多尺度成像避免了拼接图像中的画面割裂, 可以完整地进行无缝成像。尺度成像系统的次级镜头阵列中, 各个次级镜头共用同一个主镜, 使得多尺度成像系统具备更加紧凑的结构, 在实际应用中具有更强的优势。
Brady团队[3]完成的AWARE系列项目对于多尺度成像系统的研究和应用起到了推动性的作用。AWARE系列项目由美国国防部先进研究项目局(DARPA)支持, 着眼于发展具备大视场高分辨率的光电成像装备以提升目标识别的效率。AWARE-2是其第一代系统[4], 光学系统采用基于共心球透镜的多尺度成像系统, 焦距为34.2 mm, 瞬时视场角为40 μrad, 98个次级镜头实现120°×50°的成像视场。AWARE-10系统在相同成像原理下提升了设计指标[5-6], 其焦距为53.21 mm, 单帧总像素数20亿, 具备更高的目标识别精确度。AWARE-40系统在分辨率指标上进行提升[7-8], 系统焦距提升至130 mm, 视场角为36°, 单帧成像的像素量达36亿。
国内研究主要集中在主镜为球透镜的多尺度系统。2018年, 西安电子科技大学研制了基于共心球透镜的机载多尺度广域高分辨率相机[9], 其视场角为110°×90°, 空间分辨率为15 cm@5 km。2020年, 路文文等研制了主镜为单层球透镜的多尺度成像系统[10], 提升了系统应用的稳定性。基于共心球透镜的多尺度成像方式易于对视场进行无损扩展, 即次级镜头随旋转中心扩展至任意角度都不会降低成像质量。其瞬时视场角为30~40 μrad, 在需要更强分辨能力的场景中, 将提升系统焦距而导致主镜尺寸的增加, 在球透镜的加工环节难以实现。
本文针对基于球透镜的多尺度成像系统提升分辨率方面存在的瓶颈, 通过对基于天塞结构主镜的多尺度成像系统进行研究, 提升多尺度成像系统的分辨能力, 满足更远距离下对于目标高准确度识别的需求。相较主镜为共心球透镜的多尺度成像系统, 基于天塞主镜的多尺度系统从提升主镜焦距的角度出发, 使组合系统具备更长的焦距和更高的空间分辨率。
1 多尺度成像系统的原理
图1展示了多尺度成像的原理及其探测器上的成像效果图, 图1(a)的多尺度成像系统由主镜和次级镜头阵列构成, 主镜对大视场范围的物体光场进行收集并形成一次像面, 次级镜头阵列中每个小相机对主镜的像进行二次局部成像[11]。次级镜头阵列的成像效果如图1(b)所示, 在设计环节保证相邻小相机具有重叠的成像视场, 最终通过图像拼接得到完整视场范围内的图像。
式(1)描述了普通的单光轴系统以四阶球差、 彗差、 像散、 离焦及畸变系数表示的波像差多项式[12]。
W(H, ρ, )=W040ρ4+W131Hρ3cos+W222H2ρ2cos2+W220H2cos2+W311H3ρcos(1)
式中: H表示歸一化的视场; ρ表示归一化的光瞳直径; 为光瞳坐标中的方位角。
多尺度系统中次级镜头阵列对局部像差进行校正, 对于第n个次级镜头, 式(2)描述了其中心视场的波前像差。
W(H-Hn, ρ, )=W040ρ4+W131(H-Hn)ρcos+W222(H-Hn)2ρ2cos2+W220(H-Hn)2ρ2+W311(H-Hn)3ρcos(2)
除球差外, 其他各项都与视场相关, 将彗差、 像散、 离焦和畸变分别展开表示为式(3)~(6):
W131(H-Hn)ρcos=W131Hρcos-W131Hnρcos(3)
W222(H-Hn)2ρ2cos2=W222H2nρ2cos2-2W222HHnρ2cos2 + W222H2ρ2cos2(4)
W220(H-Hn)2ρ2=W220H2nρ2-2W220HHnρ2 + W220H2ρ2(5)
W311(H-Hn)3ρcos=-W311H3nρcos+ 3W311HH3nρcos-3W311H2Hnρcos + 3W311H3ρcos(6)
像差展开后获得很多非标准赛德尔形式的像差项, 表明视场相关的高阶像差转到了低阶项, 高阶像差的减少使得像差校正的难度降低。多尺度成像系统的次级镜头阵列在小尺度上对主镜一次像面的剩余像差进行校正, 这种化整为零的像差校正方式容易获得较好的效果, 有效提升了系统的空间带宽积[13], 从而获得大视场高分辨率的成像效果。
2 多尺度长焦光学系统设计
2.1 设计参数
系统针对IMX探测器进行设计, 其感光区域对角线长度为10.04 mm, 像素数量为3 552×3 552, 像元尺寸为2 μm。光学系统工作波段为可见光, 有效焦距为143 mm, 瞬时视场角为14 μrad。对于阵列次级镜头中的每一个探测器, 其接收的视场范围为2.846°×2.846°, 系统的总视场取决于主镜的总视场角和次级镜头阵列的排布数量。
F数也写作F/#, 数值上等于系统的有效焦距除以入瞳直径, 它与像方数值孔径NA′满足如下关系:
F数越小, 则系统的相对口径越大, 衍射产生的艾里斑半径也越小, 入射到像点的锥角越大, 像面接收的能量越多。过小的F数存在像差校正困难, 以及镜片口径过大导致次级镜头阵列在最紧排布下无法实现相邻视场的重叠等问题。基于光学系统的整体性能考虑, 将系统F数定为3.4, 对应的艾里斑半径约2.3 μm, 在像差得到良好校正时, 光学系统与探测器匹配能够清晰成像, 从而保证系统的空间分辨率满足设计指标。光学系统的设计指标如表1所示。
2.2 天塞主镜设计
多尺度成像系统中, 增大主镜焦距可有效提升系统的整体焦距, 使系统具备更高的分辨能力。本系统中主镜的天塞结构由四片透镜组成, 相较于库克三片式, 其次镜胶合结构使其具备更好的场曲校正和消色散效果。
对于主镜和次级镜头组合的整体系统, 满足
EFL=f1·M2(8)
式中: EFL为整个系统的有效焦距; f1为主镜的焦距; M2为次级镜头的放大率。通常次级镜头的放大率过大会增加像差校正的难度, 这里将主镜的焦距设计为350 mm, 经计算次级镜头的放大率为-0.408 6时, 满足组合系统的焦距要求。
次级镜头阵列的排布问题是多尺度成像系统有别于传统光学系统的鲜明特征, 一方面需要保证相邻次级镜头的视场有一定范围的重叠, 以满足全视场图像拼接的要求, 另一方面需要满足结构上的容易实现。主镜为共心球透镜的多尺度系统由于其优异的对称特性使得系统的设计步骤相对简单。采用天塞结构作为主镜时, 如何与次级镜头阵列匹配以满足多尺度成像的需求是关注的重点问题。本文对主镜的设计, 从两个方面的约束来保证整个多尺度系统的成像质量。一方面, 对主镜各个视场的出射光线进行约束, 使出射光线的主光线以垂直角度入射至主镜所成的一次像面, 从而让离轴光路中对应视场内的光线顺利由主镜进入次级镜头而不被拦截。另一方面, 约束各个视场主光线的出射角度与入射角度相同, 即与系统所设置的对应视场角相同, 此约束可以保证次级镜头阵列在排布的时候能够围绕一次像面的曲率中心进行线性排布。
这类主镜相对于共心球透镜的另一个显著差异是视场角的设计。对于主镜为共心球透镜的多尺度系统, 次级镜头的光轴和主镜的光轴总是共轴的, 其最大视场角可以扩展至超广角范围。当主镜是普通的物镜结构时, 仅中心视场对应的次级镜头和主镜光轴同轴, 其他任何位置次级镜头的光轴与主镜的光轴都发生偏转, 对于主镜所成的一次像面而言, 其成像质量随着视场的增加而降低, 离轴位置次级镜头对于像差校正的压力也变大。
为满足次级镜头阵列排布所加的约束以及主镜的口径等问题, 设计主镜视场角为40°, 完成设计的主镜结构如图2所示。设计过程中, 对系统均匀添加共11个视场, 最大半视场对应20°, 在设计与仿真软件中用操作数RAID约束光线垂直进入一次像面, 用操作数RANG约束主光线的出射角与入射角相等。主镜系统的F数为2.4, 焦距为350 mm, 镜片的最大口径小于230 mm。
主镜的RMS弥散斑在全视场内介于29.4 μm到38.9 μm之间。作为大尺度主镜, 设计关注的是主镜的成像一致性及各项约束的满足要求, 一次像面上的几何像差将在小尺度的次级镜头阵列中进行校正。可以看出, 弥散斑尺寸在邻近视场的差异已经很微小, 整体上的一致性良好。
2.3 次级镜头及组合系统设计
在次级镜头的设计过程中, 将次级镜头的放大率作为一阶参数进行约束, 次级镜头放大率为-0.408 6。次级镜头的口径也是一个需要重点考虑的问题, 一方面, 次级镜头的口径与次级镜头的F数有关, 而次级镜头的近轴F数也就是主镜和次级镜头组合系统的F数。另一方面, 次级镜头口径和主镜次镜间距也与次级镜头阵列的排布相关。图3表示了多尺度系统中相邻次级镜头的视场重叠关系。相鄰次级镜头的夹角θ可近似表示为次级镜头的结构间距h与间距d的比值, 如式(9)所示。
当相邻次级镜头紧密贴合的时候, 相邻次级镜头的结构间距h与次级镜头的口径D近似相等。为保证相邻次级镜头获取的图像存在一定的重叠区域, 应至少满足相邻次级镜头紧密贴合的时候存在视场重叠。通过对次级镜头的口径D和间距d的关系约束, 满足多尺度系统中相邻次级镜头视场重叠的要求。
轴上次级镜头的设计如图4所示。次级镜头的放大率为-0.408 6, 近轴F数为3.2, 物距为76.1 mm, 最大镜片口径为8.46 mm, 满足主镜搭配次级镜头阵列正常排布的需求。
单独设计次级镜头时, 物面曲率与一次像面一致, 但由于一次像面上存在较大的几何像差, 即便次级镜头在单独设计环节具备优异的成像质量, 也代表不了搭配主镜组合后的成像情况, 重点在于将主镜和次级镜头组合优化。在组合系统的优化过程中, 为了保持主镜的特性不发生变化, 固定主镜的参数, 将次级镜头的参数作为变量进行成像质量优化, 组合系统的设计结果如图5所示, 组合系统的有效焦距为-143 mm, F数为3.4, 系统总长为642.67 mm, 孔径光阑位于次级镜头中第三片透镜之后, 各个镜片厚度均匀, 面型平缓, 像差校正均匀分配到各个表面。
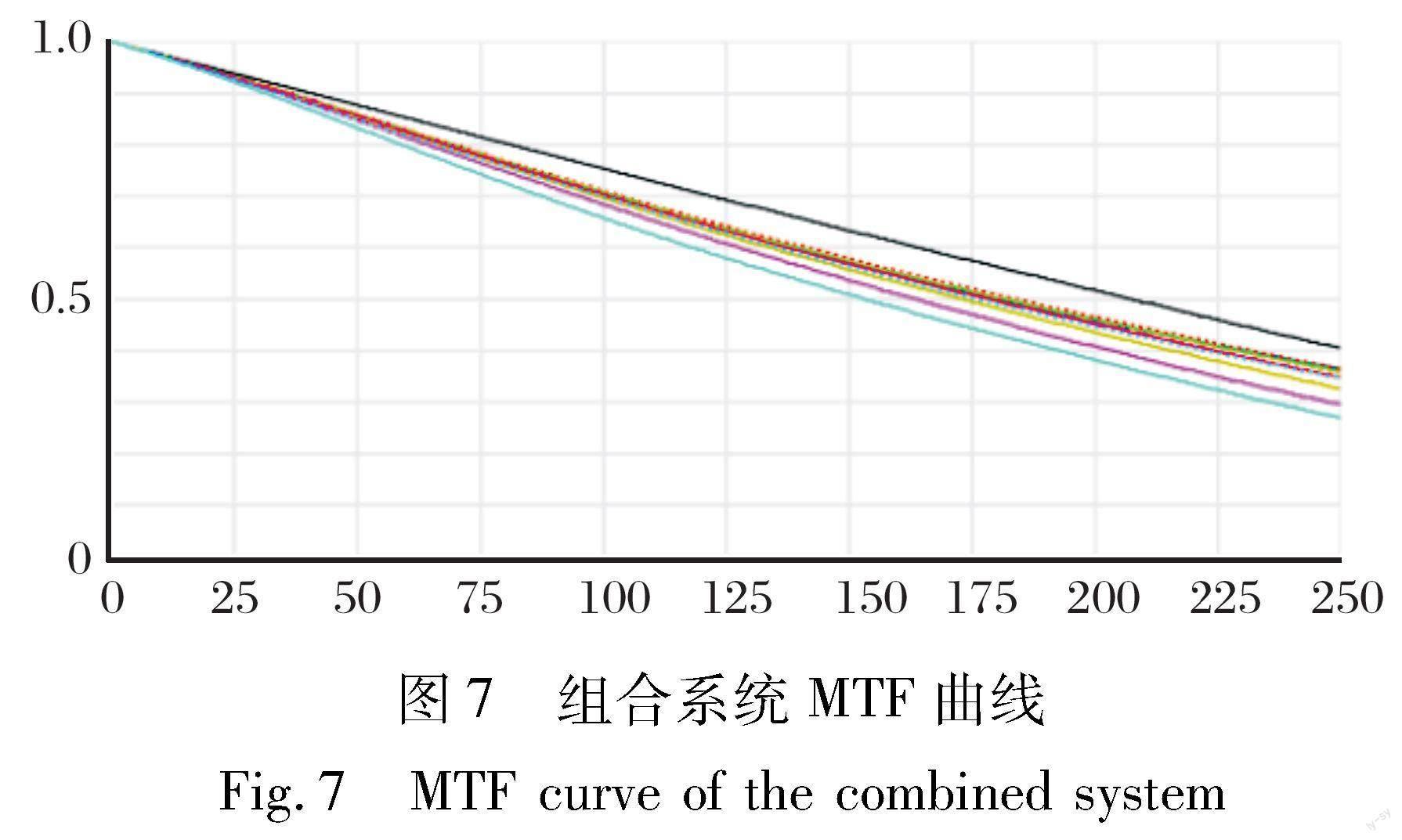
组合系统成像的点列图如图6所示, 艾里斑半径为2.334 μm, 中心视场RMS弥散斑半径为1.119 μm, 边缘视场对应的RMS弥散斑半径为2.425 μm, 几何像差得到充分的校正。系统的MTF曲线如图7所示, 按照探测器像元尺寸2 μm计算得到奈奎斯特频率为250 lp/mm, 各视场MTF曲线几乎重合, 同一视场的子午和弧矢方向MTF数值接近, 在奈奎斯特频率下MTF最小值为0.27, 表明系统成像对细节保留较强的分辨能力。 图8展示了组合系统的场曲和畸变曲线, 场曲曲线的横坐标小于0.05 mm, 最大视场的光学畸变为-0.5%, 图像产生的畸变较为轻微。
3 全视场范围的成像优化
3.1 全视场范围内的成像一致性分析
根据组合系统的设计结果, 计算得出相邻次级镜头按照2.54°排布时, 相邻探测器成像中重叠区域占381个像素。完成次级镜头阵列排布的系统3D结构如图9所示, 次级镜头阵列排布效果如图10所示。整个多尺度系统按照7行11列的次级镜头阵列排布, 对应视场角为28.2°×18°, 对角线方向为33.4°。
对主镜而言, 各个视场位置的成像质量均不相同, 且随着视场角的增加成像质量下降, 可以推断不同位置的次级镜头对于像差校正的情况也不一样。为了方便对系统全视场范围内成像一致性的分析, 对次级镜头阵列中的不同位置进行编号标记, 如图11所示, 由于主镜满足旋转对称的成像特性, 对加框区域的次级镜头进行位置标记, 即可表示所有次级镜头的成像情况。将次级镜头的位置标记为P0, P1, P2等, 分别表示轴上次级镜头0倍、 1倍、 2倍等间隔角度偏转的次级镜头位置, 例如, P2位置的2倍指的是相邻次级镜头间隔角度2.54°的2倍。实际上, 通过图11中对次级镜头位置的标记可以看出, 大部分次级镜头并不对应整数倍间隔角度的位置, 如P1.4, P2.2及P2.8等位置。
图12展示了轴上次级镜头参数用于次级镜头阵列对整个视场成像的情况, 分别对应P1, P2, …, P6位置。可以看出, 随着次级镜头排布位置对应的离轴角度增加, 从P3位置开始, MTF数值有明显的降低, 对应的次级镜头按照轴上次级镜头的设计参数无法清晰成像。
3.2 邻近次级镜头的协同优化
为提升多尺度系统整个视场范围内的成像一致性, 对于位置靠近且成像质量接近的离轴次级镜头, 使用相同的参数进行协同優化, 最终实现以最少的次级镜头设计方案对全视场范围内清晰成像。
在单个离轴次级镜头以其子午面分割的单边视场范围内, 不同视场位置产生的波前像差均不一样, 旋转对称的镜片面型对整个视场内的像差无法充分校正。本文采用XY多项式自由曲面对轴外次级镜头的像差进行校正[14-15]。其面型表达式如式(10)所示。
式中: z为坐标(x, y)处对应的表面高度; Ai, j为面型表达式中多次项的系数; c为曲率; k为二次曲面系数。
将邻近的次级镜头加入多重结构进行协同优化后, 采用4组次级镜头设计参数可满足全视场范围内77个次级镜头清晰成像的要求。为便于描述, 将其称为S1, S2, S3和S4方案。每组方案与次级镜头位置的对应关系如图13所示, 对应图11中标注的全视场1/4区域, 在位置代号下方以4种颜色标记了次级镜头的设计方案代号, 其他区域的次级镜头均与图中的镜像存在等同的关系。
全视场成像一致性的优化效果通过4组次级镜头方案在对应位置的MTF曲线对比如图14所示, S1方案对应的次级镜头区域距离主镜的光轴接近, 其次级镜头采用普通球面透镜即可完成像差的校正。S2至S4方案对应的次级镜头区域, 在设计中加入了自由曲面完成离轴像差的校正。可以看出, 全视场范围内的MTF曲线一致性较好, 在奈奎斯特频率250 lp/mm下, S4方案在P5.8位置对应的MTF最低值为0.19, 表明全视场范围内各个位置的次级镜头均实现了理想的像差校正效果。
4 结 论
针对多尺度成像系统对于更高分辨率的设计需求, 本文采用提升主镜焦距的方法, 对基于天塞主镜的多尺度长焦系统光学系统进行设计。通过对主镜的出射光线进行特定约束以满足次级镜头阵列的线性排布。设计的系统焦距为143 mm, F数为3.4, 次级镜头阵列由7行11列共77个次级镜头组成, 对应的视场角为28.2°×18°, 对角线方向视场角为33.4°。对各个位置的次级镜头进行邻近区域的协同优化, 用4组参数设计的次级镜头完成全视场范围内的清晰成像, 在离轴位置次级镜头的优化中, 采用自由曲面面型对非对称的像差进行校正。在奈奎斯特频率250 lp/mm处, 系统各个视场的MTF值均大于0.19, 像差被充分校正。系统搭配像元尺寸为2 μm的IMX型探测器, 瞬时视场角为14 μrad, 其空间分辨率相较于主镜为共心球透镜的多尺度系统具有显著提升。
参考文献:
[1] 刘飞, 吴晓琴, 赵琳, 等. 广域高分辨率计算光学成像系统研究进展[J]. 激光与光电子学进展, 2021, 58(18): 10-35.
Liu Fei, Wu Xiaoqin, Zhao Lin, et al. Research Progress of Wide-Field and High-Resolution Computational Optical Imaging System[J]. Laser & Optoelectronics Progress, 2021, 58(18): 10-35.(in Chinese)
[2] Marks D L, Son H S, Kim J, et al. Engineering a Gigapixel Monocentric Multiscale Camera[J]. Optical Engineering, 2012, 51(8): 083202.
[3] Brady D J, Gehm M E, Stack R A, et al. Multiscale Gigapixel Photography[J]. Nature, 2012, 486(7403): 386-389.
[4] Youn S H, Son H S, Marks D L, et al. Optical Performance Test and Validation of Microcameras in Multiscale, Gigapixel Imagers[J]. Optics Express, 2014, 22(3): 3712.
[5] Marks D L, Llull P R, Phillips Z, et al. Characterization of the AWARE 10 Two-Gigapixel Wide-Field-of-View Visible Imager[J]. Applied Optics, 2014, 53(13): C54-C63.
[6] Nichols J M, Judd K P, Olson C C, et al. Range Performance of the DARPA AWARE Wide Field-of-View Visible Imager[J]. Applied Optics, 2016, 55(16): 4478-4484.
[7] Llull P, Bange L, Phillips Z, et al. Characterization of the AWARE 40 Wide-Field-of-View Visible Imager[J]. Optica, 2015, 2(12): 1086.
[8] Marks D L, Son H S, Phillips Z F, et al. Multiscale Camera Objective with Sub 2 Arcsec Resolution, 36 Degree Field-of-View[C]∥Classical Optics, 2014.
[9] 劉飞, 魏雅喆, 韩平丽, 等. 基于共心球透镜的多尺度广域高分辨率计算成像系统设计[J]. 物理学报, 2019, 68(8): 99-108.
Liu Fei, Wei Yazhe, Han Pingli, et al. Design of Monocentric Wide Field-of-View and High-Resolution Computational Imaging System[J]. Acta Physica Sinica, 2019, 68(8): 99-108.(in Chinese)
[10] 路文文, 陈善勇, 翟德德, 等. 混合仿生鱼眼-复眼的广角高清成像系统[J]. 应用光学, 2019, 40(2): 311-315.
Lu Wenwen, Chen Shanyong, Zhai Dede, et al. Biomimetic Hybrid Fisheye/Compound Eye Imaging System with Wide View and High Resolution[J]. Journal of Applied Optics, 2019, 40(2): 311-315.(in Chinese)
[11] Brady D J, Hagen N. Multiscale Lens Design[J]. Optics Express, 2009, 17(13): 10659.
[12] Smith W J. Modern Optical Engineering[M]. 4th ed. Bellingham: SPIE Press, 2007.
[13] Cossairt O S, Miau D, Nayar S K. Gigapixel Computational Imaging[C]∥ IEEE International Conference on Computational Photography, 2011: 1-8.
[14] Rolland J P, Davies M A, Suleski T J, et al. Freeform Optics for Imaging[J]. Optica, 2021, 8(2): 161.
[15] 楊通, 段璎哲, 程德文, 等. 自由曲面成像光学系统设计: 理论、 发展与应用[J]. 光学学报, 2021, 41(1): 115-143.
Yang Tong, Duan Yingzhe, Cheng Dewen, et al. Freeform Imaging Optical System Design: Theories, Development, and Applications[J]. Acta Optica Sinica, 2021, 41(1): 115-143.(in Chinese)
Design of a Multi-Scale Long-Focal Imaging
System Based on Tessar Primary Lenses
Abstract: In order to meet the demand for accurate identification of distant targets by improving the resolution of multi-scale imaging systems, from primary lenses focus, a design scheme of a multi-scale long-focal imaging system based on the Tessar primary lenses is proposed in this paper. Two constraints that need to be added to the primary lenses for meeting the linear arrangement of secondary lenses are analyzed. In response to the problem of the imaging quali-ty degradation of the system as the off-axis angle of the secondary lenses array increases, synergy optimization is applied to the secondary lenses in adjacent areas. Additionally, free-form surface types are used to correct aberrations in the off-axis position optimization of the secondary lenses. The MTF curves of different field-of-view areas are consistent, showing that the system achieves ideal imaging quality across the full field of view. The spatial resolution of the multi-scale imaging system designed using the Tessar primary lenses structure is 14 μrad. Compared to multi-scale systems based on concentric spherical lenses, it is significantly higher.
Key words: multi-scale system; high resolution; Tessar structure; telephoto system; optical design; photoelectric imaging
猜你喜欢
中国农业信息(2021年6期)2021-04-19 12:20:16
雷达学报(2020年3期)2020-07-13 02:27:16
中华胃食管反流病电子杂志(2016年2期)2016-10-10 01:31:22
太空探索(2016年3期)2016-07-12 09:58:46
河北地质(2016年2期)2016-03-20 13:52:01
中国医学装备(2015年10期)2015-12-29 12:00:24
微生物与感染(2015年5期)2015-12-08 07:03:24
河北遥感(2015年3期)2015-07-18 11:12:30
河北遥感(2015年1期)2015-07-18 11:11:26
太空探索(2015年8期)2015-07-18 11:04:44