基于磁梯度测量的磁校准方法
2024-04-18 06:46:10金煌煌庄志洪王虹
航空兵器 2024年1期
金煌煌 庄志洪 王虹
摘 要: 利用三轴磁传感器进行飞行器航向测量或者磁异常探测之前, 需要对磁传感器进行磁干扰校准。 为了避免由于地磁场短时波动造成校准精度下降, 本文基于近地空间地磁场梯度分布特性, 提出一种利用磁梯度测量的磁传感器干扰校准方法, 建立了磁梯度测量系统磁干扰的24参数干扰模型, 基于单传感器的椭球拟合法多组任意旋转构建多元非线性方程组, 随后利用具有较高区域搜索效率的遗传算法进行非线性方程组的求解。 仿真结果表明, 和传统的椭球拟合校准方法相比, 该方法克服了地磁场短时波动的影响, 提升了磁梯度测量系统的校准精度, 其磁梯度差分测量误差可校准至[1.848 2 1.845 3 1.915 0]T nT。 该研究为航磁系统的载体干扰补偿和高精度测量提供了可靠保障。
关键词: 磁梯度测量; 磁干扰校准; 遗传算法; 三轴磁强计; 椭球拟合; 航向测量; 飞行器
中图分类号: TJ760
文献标识码: A
文章编号: 1673-5048(2024)01-0117-05
DOI: 10.12132/ISSN.1673-5048.2023.0100
0 引 言
三軸矢量磁传感器作为重要的航向测量器件, 被广泛应用于无人机、 导弹、 炮弹等飞行器的组合导航中[1], 同时搭载三轴矢量磁传感器进行的航空磁探测在矿产勘探、 未爆弹探测以及航空磁探潜[2-4]等领域也得到各国科研人员的关注。
由于安装误差、 零点漂移、 灵敏度差异[5-6]以及载体的铁磁性物质与电子线路[7-9]对磁传感器的测量造成干扰, 为了获取精确的航空磁传感器测量数据, 需要在测量前及测量过程中对磁传感器进行磁干扰校准和补偿。
本文重点研究三轴磁传感器的静态磁干扰校准, 即在航空磁传感器系统安装完成后进行测量之前必须进行的校准工作。 其目的在于减小由于磁传感器三轴正交误差、 三轴灵敏度差异、 载体静态硬磁干扰[10-12]等误差源对磁传感器测量精度的影响。
现有的磁传感器静态干扰校准方法主要包括椭球拟合法[13]和系数校正法[14]等。 这些方法均基于环境磁场恒定的假设, 该假设只在人为构建的磁屏蔽环境中才能实现。 在外场试验过程中, 发现以地磁场为主的环境磁场在短时间内存在高达上百纳特斯拉的波动, 因此上述两种方法在进行磁传感器静态干扰校准时存在较大的系统误差, 在高精度磁异常探测领域需要更高精度的磁校准方法。
本文提出的基于磁梯度测量的磁校准方法, 借鉴了目前磁异常定位的主要手段, 即利用近地空间地磁场梯度较小的特点[15-18], 构建磁梯度测量系统的24参数干扰模型, 并采用任意自由度旋转和遗传算法进行干扰方程组的建立和求解, 从而准确获得系统干扰参数。
1 磁传感器静态干扰模型
首先建立单个磁传感器静态干扰模型。 对单个三轴矢量磁传感器来说, 其静态干扰源主要来自四个方面: 安装误差导致的三轴非正交误差、 三轴标定系数误差、 磁滞现象导致的零点漂移误差、 传感器测量噪声及载体的硬磁干扰, 再依次对上述干扰源进行建模。
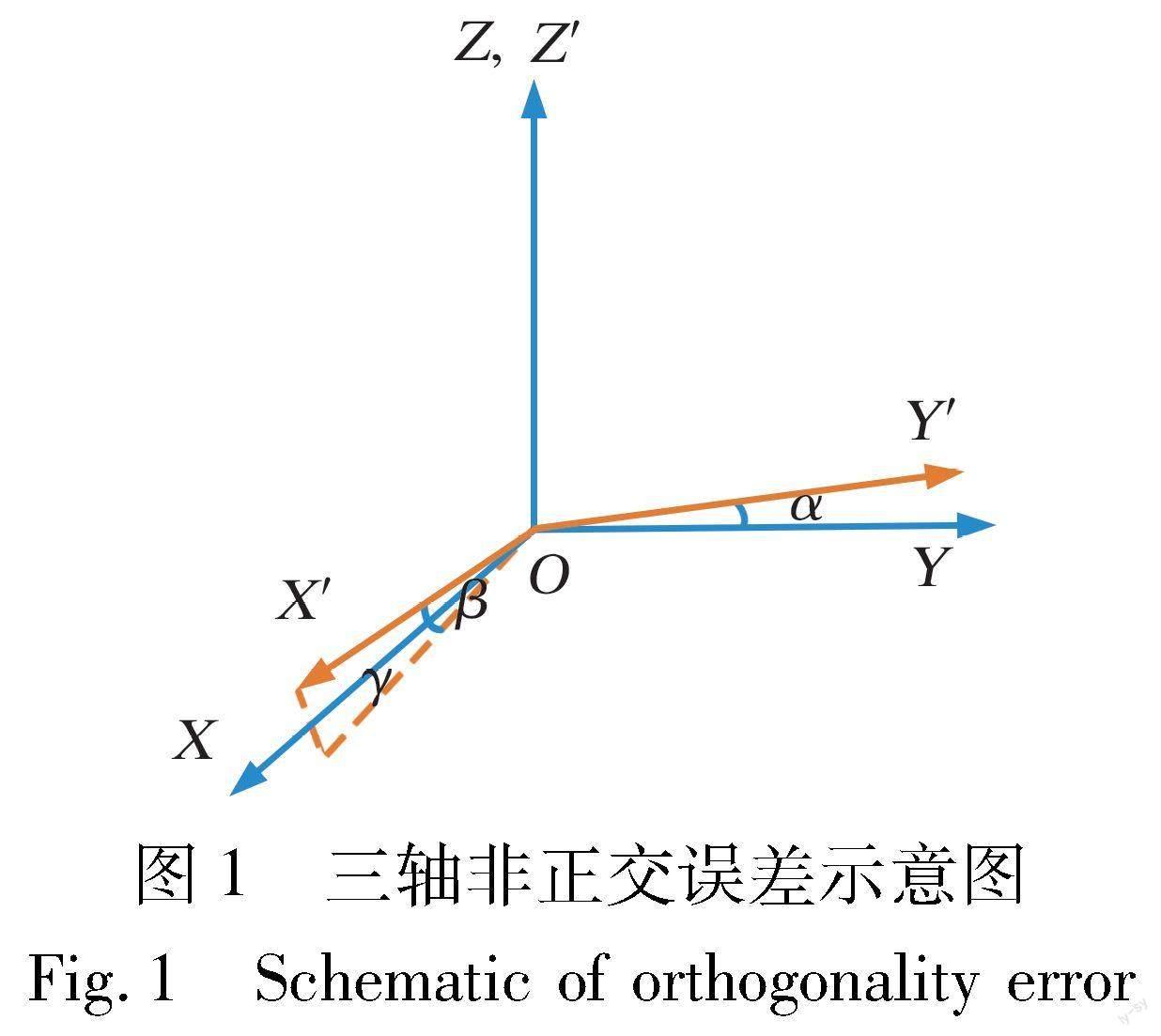
三轴矢量磁传感器由于安装工艺导致其三个实际测量轴不可能完全正交。 如图1所示, 假设其理想正交测量坐标系为OXYZ, 实际测量坐标系为OX′Y′Z′, 其中OZ与OZ′重合, YOZ与Y′OZ′共面, 且OY与OY′之间的夹角为α, OX′与XOZ面的夹角为β, OX′在XOZ面上的投影与OX的夹角为γ。
则磁传感器测得的磁场矢量Bm与实际磁场矢量Br之间的关系, 可由两个坐标系之间的旋转变换得到:
式中: R为正交转换矩阵。 实际磁传感器的非正交误差一般不大, 以Mag-03MS系列高精度磁通门传感器为例, 其非正交误差小于0.1°, 因此可将正交转换矩阵R近似为
考虑到磁传感器的3个测量轴标定系数差异, 设其三轴标定系数分别为Kx, Ky和Kz (Mag-03MS系列磁通门传感器的标定误差小于±0.5%), 则标定系数矩阵K可表示为
由于磁滞现象以及信号处理电路导致的零点漂移和载体的硬磁干扰对磁传感器来说可以统一建模成硬磁干扰, 硬磁干扰是磁传感器静态干扰源的最主要成分, 可表示为固定矢量磁场Bh。
因此, 磁传感器静态干扰模型可表示为
Bm=K·R·Br+Bh+Bn(4)
式中: Bn为传感器测量噪声, 一般为高斯白噪声[19]。
2 磁梯度测量系统静态干扰模型
现有的矢量磁传感器静态干扰校准大多是利用单传感器静态干扰模型, 并基于地磁场在短时间内恒定的假设, 对传感器进行三维旋转后拟合计算得到校准参数。 但是在绝大多数自然环境条件下, 地磁场在短时内存在较大波动, 如图2所示。 该曲线为野外空旷地带获取的地磁场大小实测数据, 可见地磁场大小在短时仍有高达200 nT的波动, 显然与单传感器校准的前提假设不符。
研究表明, 我国地表附近的地磁场磁感应强度梯度量级为10-12~10-11 T/m[20], 在工程应用中相对于磁异常梯度场可以将其近似为0。 基于该特性, 在进行磁异常探测时, 可以利用磁场差分梯度将地磁信号抵消。 为了规避地磁场短时波动造成磁传感器校准精度下降的问题, 利用近地空间地磁场梯度极小的特性, 构建了磁梯度测量系统的静态干扰模型。
如图3所示, 对于两个磁传感器构成的最简磁梯度测量系统而言, 由于传感器自身的装配误差和系统安装误差, 导致在传感器理想测量正交坐标系间存在一定的对准误差, 在进行磁梯度测量系统的静态干扰模型时, 需将其考虑进去。
通过多次采样均值滤波可以有效减小测量高斯白噪声带来的干扰, 因此本文忽略测量噪声的影响, 由式(4)可得两个磁传感器理想正交坐标系下的磁场强度分别为
考虑两个磁传感器理想正交坐标系间的对准误差, 需要引入旋转变换矩阵Rg。 另外, 由于磁传感器自身安装精度造成测量坐标系与机械坐标系的角度偏差(Mag-03MS系列磁通门传感器的Z轴安装偏差小于0.1°), 需要分别引入旋转变换矩阵R1a和R2a, 因此磁梯度系统的静态干扰模型可表示为
Gr=R1a·B1r-Rg·R2a·B2r=R1a·(K1·R1)-1·(B1m-B1h)-Rg·R2a·(K2·R2)-1·
(B2m-B2h) (6)
式中: R1a·(K1·R1)-1可简化为包含9个未知参数的矩阵M1; Rg·R2a·(K2·R2)-1可简化为包含9个未知参数的矩阵M2。 又由地磁场梯度特性可将Gr近似为0, 则式(6)可简化为
M1·(B1m-B1h)-M2·(B2m-B2h)=0(7)
3 磁梯度干扰校准算法
以图4所示的磁梯度测量系统为例, 测量系统在任意旋转角度下的两个磁传感器测量值分别为B1m(θ)和B2m(θ), 则无磁异常目标下的磁梯度矢量为
M1·(B1m(θ)-B1h)-M2·(B2m(θ)-B2h)=0(8)
因此, 將该磁梯度测量系统任意旋转多个不同角度, 即可得到如下的非线性方程组:
则磁梯度测量系统的静态干扰校准问题就转化为对上述非线性方程组的求解问题。 通过求解未知矩阵和未知向量M1, M2, B1h, B2h, 即可得到磁传感器在同一坐标系下的真实测量值, 并保证磁梯度测量系统的测量精度。
B1r=M1·(B1m-B1h)
B2r=M2·(B2m-B2h)(10)
对于简单非线性方程组的求解, 牛顿迭代法在待求零点邻近区域内具有平方收敛的性能, 但在较大区域内存在多解的情况下, 其很难得到最优解。 本文基于单传感器椭球拟合方法获取的先验知识, 利用遗传算法(GA)对上述非线性方程组进行优化求解。
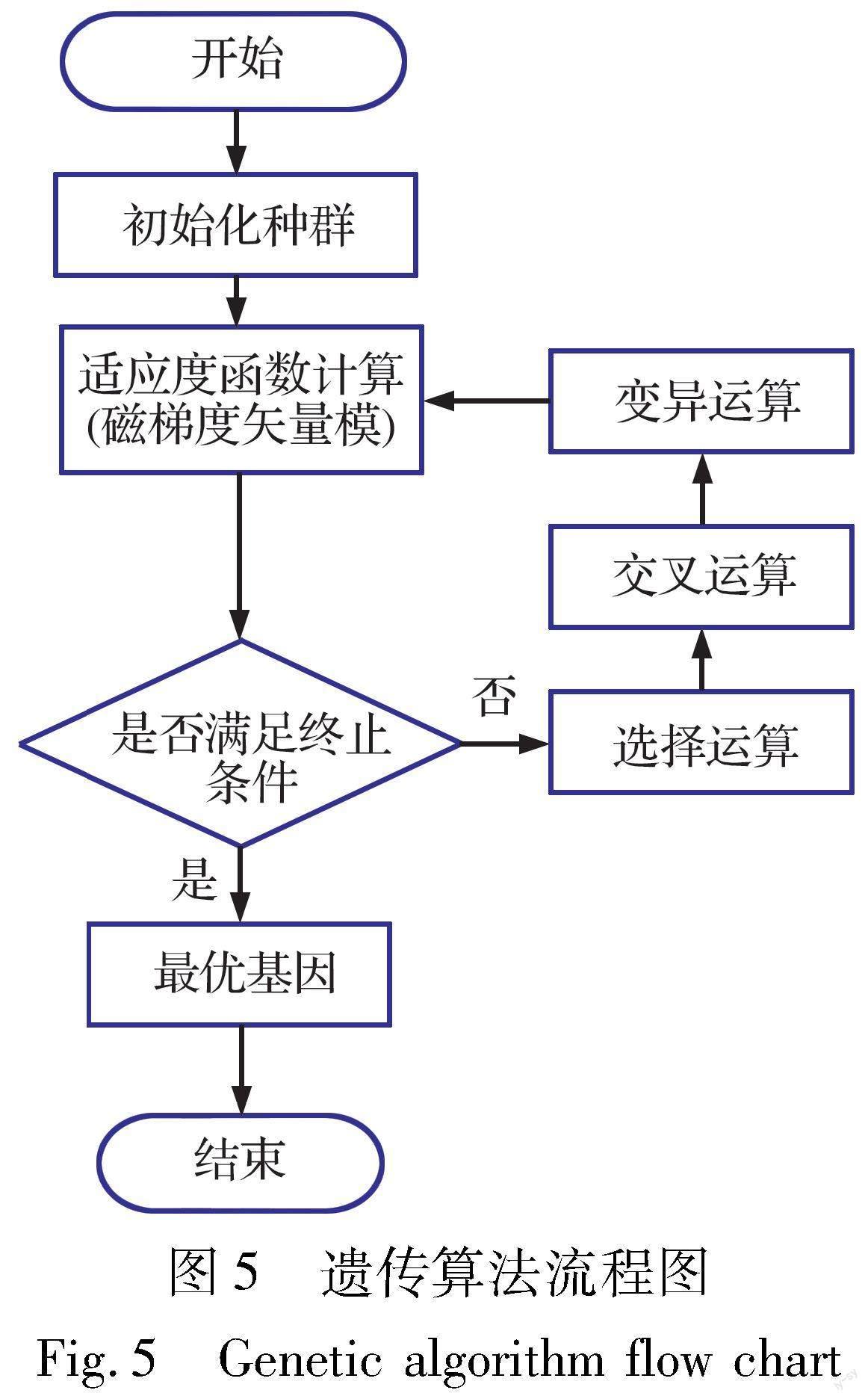
遗传算法是计算机科学人工智能领域用于解决最优化的一种搜索启发式算法[21], 是进化算法的一种。 进化算法最初是借鉴进化生物学中的一些现象而发展起来的, 这些现象包括遗传、 突变、 自然选择以及杂交等。 遗传算法的基本运算过程如下。
初始化种群: 构建染色体个体, 在给定区间范围内随机生成初始种群;
个体评价: 计算种群中各个个体的适应度;
选择运算: 选择的过程是一种基于适应度的优胜劣汰的过程, 指以一定的选择算法从种群中选择若干个体的操作;
交叉(基因重组)运算: 交叉运算是按照一定的交叉概率结合来自父代交配种群中的信息产生新的个体;
变异运算: 交叉之后的子代进行变异, 即子代个体按小概率扰动产生的变化; 种群经过选择、 交叉、 变异运算后得到下一代种群。
终止条件判断: 若种群中的个体满足给定的适应度条件, 则终止进化过程。
遗传算法的算法流程图如图5所示。
根据式(10), 需进行优化的校准参数共有24个, 若将24个校准参数作为单个遗传算法里的染色体基因, 会造成算法效率下降以及多解问题。 为确保算法效率及校准精度, 在选择染色体基因及适应度函数方面, 本文做了相应处理。
(1) 将式(8)分解成3个彼此独立的非线性方程, 即
mi1(b1mx(θ)-b1hx)+mi2(b1my(θ)-b1hy)+
mi3(b1mz(θ)-b1hz)-[m′i1(b2mx(θ)-b2hx)+
m′i2(b2my(θ)-b2hy)+m′i3(b2mz(θ)-b2hz)]=0
(11)
式中: i=1, 2, 3。 mi1, mi2, mi3和m′i1, m′i2, m′i3分别为校准矩阵M1和M2的分量, b1mx, b1my, b1mz和b2mx, b2my, b2mz分别为两个传感器测量矢量B1m和B2m的分量, b1hx, b1hy, b1hz和b2hx, b2hy, b2hz分别为两个传感器硬磁干扰矢量B1h和B2h的分量。 每个方程分别用独立的遗传算法进行优化求解, 以减少各遗传算法染色体基因数量。
(2) 仿真结果表明, 磁梯度测量精度受硬磁干扰相比校准矩阵影响更小。 为进一步减少基因数量, 将单传感器椭球拟合得到的硬磁干扰矢量作为已知量, 进行适应度函数的计算。
(3) 三个遗传算法分别进行校准矩阵三个行向量6分量的优化, 传感器测量值任取12组旋转值, 适应度函数为求取12项式(11)左侧梯度矢量的模, 在椭球拟合获取的校准矩阵基础上, 取适当邻域范围作为染色体初始种群。
4 仿真试验验证
4.1 仿真条件
使用仿真软件进行磁梯度干扰校准方法的仿真试验验证, 并将本文方法与单传感器的椭球拟合校准方法进行比较。 根据实测环境地磁场的短时波动特征, 给出地磁场大小仿真曲线如图6所示, 并以当地实际地磁场情况为参考, 取仿真地磁场磁倾角为50°, 磁偏角为-5°(偏东为正)。 传感器的误差参数取Mag-03MS系列磁通门传感器的典型值。 传感器1的三轴非正交角度取0.1°, 三轴标定系数误差取0.5%, 硬磁干扰B1h=[1001000]T nT, Z轴安装偏差取0.05°; 传感器2的三轴非正交角度取0.05°, 三轴标定系数误差取0.4%, 硬磁干扰B2h=[-2001000]T nT, Z轴安装偏差取0.05°。 两个传感器间的坐标系对准误差旋转矩阵(依次绕X轴、 Y轴旋转0.5°)为
4.2 椭球拟合仿真结果
针对单个磁传感器, 椭球拟合法给出了校准方法。 以传感器1为例, 参照文献[13]给出的椭球拟合法以及试验步骤, 任意旋转三轴矢量磁传感器, 并采集300组磁传感器三轴磁场数值, 记录绘图。 采用测量总场值与实际总场值的标准差来衡量测量误差大小。 校准前, 其磁总场测量的标准差为255.530 2 nT。
采用校准精度较高的总体最小二乘法进行椭球参数拟合[13], 并通过旋转一周每隔30°将校准后的地磁场总场值与实际值比较, 得出椭球拟合校准后总场测量误差的标准差和最大值分别为35.381 5 nT和99.163 1 nT。 同理可得,传感器2的磁总场测量误差校准前和校准后的标准差分别为228.142 4 nT和20.918 7 nT。
通过椭球拟合校准方法可分别得到磁传感器1和2的校准参数M1, M2, B1h, B2h的初值, 仿真可得磁梯度测量系统校准前后磁梯度矢量三轴的误差标准差分别为[45.578 1 33.049 9 17.9061]T nT和[35.231 732.905 1 3.140 5]T nT, 显然难以满足高精度的磁梯度测量要求。
进一步采用遗传算法优化求解校准矩阵M1, M2。 将18个校准系数按浮点数编码方式进行编码以提高运算效率, 选择初始种群大小为100, 较大规模的初始种群有利于选定范围内的全局搜索。 以轮盘赌方式选择50%的父代个体, 进行交叉并按5%的概率变异后完成遗传算法的一次迭代, 直到最优适应度满足设定要求, 停止迭代。 校准矩阵三个行向量对应的三组适应度函数曲线如图7所示。
图7中, 适应度函数以较快速率完成遗传算法的收敛。 校准结果表明, 采用磁梯度干扰校准算法后磁传感器1的磁总场测量误差的标准差为0.632 8 nT, 传感器2的磁总场测量误差的标准差为0.645 5 nT; 磁场梯度误差标准差为[1.848 2 1.845 3 1.915 0]T nT。 相较于椭球拟合校准方法, 其磁梯度测量精度得到大幅提高。
5 结 论
(1) 本文讨论了现有磁传感器静态干扰校准方法的不足之处在于其环境磁场恒定的假设, 并利用外场试验测量结果证实该假设的局限性。
(2) 本文利用近地空间地磁场梯度较小的特点, 给出磁梯度测量系统静态干扰模型, 在椭球拟合法得到校准参数初值的基础上, 采取遗传算法进一步减小系统校准误差。
(3) 通过仿真, 与传统单个磁传感器的椭球拟合校准方法对比, 验证了本文提出的磁梯度干扰校准方法能够有效提高磁梯度测量系统的测量精度。
参考文献:
[1] 踪华, 刘嬿, 杨业. 地磁导航技术研究现状综述[J]. 航天控制, 2018, 36(3): 93-98.
Zong Hua, Liu Yan, Yang Ye. Overview of the Research Status about Geomagnetic Navigation Technology[J]. Aerospace Control, 2018, 36(3): 93-98.(in Chinese)
[2] Schmidt P, Clark D, Leslie K, et al. GETMAG-A SQUID Magnetic Tensor Gradiometer for Mineral and Oil Exploration[J]. Exploration Geophysics, 2004, 35(4): 297-305.
[3] Wiegert R, Oeschger J. Portable Magnetic Gradiometer for Real-Time Localization and Classification of Unexploded Ordnance[C]∥OCEANS, 2007: 1-6.
[4] 金煌煌, 庄志洪, 付梦印, 等. 最简多磁偶极子等效建模方法[J]. 系统工程与电子技术, 2021, 43(8): 2066-2075.
Jin Huanghuang, Zhuang Zhihong, Fu Mengyin, et al. Modeling Method Using Simplest Multiple Magnetic Dipoles Equivalence[J]. Systems Engineering and Electronics, 2021, 43(8): 2066-2075.(in Chinese)
[5] 孙伟, 杨一涵, 王野. 基于椭球拟合的磁力计误差校正方法研究[J]. 传感技术学报, 2018, 31(9): 1373-1376.
Sun Wei, Yang Yihan, Wang Ye. Research on Error Correction of Magnetometer Based on Ellipsoid Fitting[J]. Chinese Journal of Sensors and Actuators, 2018, 31(9): 1373-1376.(in Chinese)
[6] Zeng W S, Bian Q, Gao J J, et al. Attitude-Independent Magnetometer Calibration Based on Adaptive Filtering[J]. IEEE Sensors Journal, 2022, 22(1): 195-202.
[7] 陳海明, 王双甲, 何梓君, 等. 备份航姿系统的磁传感器在线校准方法[J]. 测控技术, 2022, 41(8): 104-108.
Chen Haiming, Wang Shuangjia, He Zijun, et al. Online Calibration Method for Magnetic Sensors in Backup AHRS[J]. Measurement & Control Technology, 2022, 41(8): 104-108.(in Chinese)
[8] 杜剑. 机载平台磁传感器误差分析及校准技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
Du Jian. Research on Airborne Platform Magnetic Sensor Error Analysis and Calibration Technology[D]. Harbin: Harbin Institute of Technology, 2016. (in Chinese)
[9] 王婕, 郭子祺, 刘建英. 固定翼无人机航磁探测系统的磁补偿模型分析[J]. 航空学报, 2016, 37(11): 3435-3443.
Wang Jie, Guo Ziqi, Liu Jianying. Analysis on Magnetic Compensation Model of Fixed-Wing UAV Aeromagnetic Detection System[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(11): 3435-3443.(in Chinese)
[10] Gebre-Egziabher D, Elkaim G H, Powell J D, et al. Calibration of Strapdown Magnetometers in Magnetic Field Domain[J]. Journal of Aerospace Engineering, 2006, 19(2): 87-102.
[11] 于振涛, 吕俊伟, 毕波, 等. 四面体磁梯度张量系统的载体磁干扰补偿方法[J]. 物理学报, 2014, 63(11): 110702.
Yu Zhentao, Lü Junwei, Bi Bo, et al. A Vehicle Magnetic Noise Compensation Method for the Tetrahedron Magnetic Gradiometer[J]. Acta Physica Sinica, 2014, 63(11): 110702.(in Chinese)
[12] 雒茁君, 裴东兴, 黄子遥, 等. 地磁传感器的拟合集成校准[J]. 传感技术学报, 2022, 35(1): 44-48.
Luo Zhuojun, Pei Dongxing, Huang Ziyao, et al. Fitting Set Calibration of Geomagnetic Sensors[J]. Chinese Journal of Sensors and Actuators, 2022, 35(1): 44-48.(in Chinese)
[13] 朱建良, 王興全, 吴盘龙, 等. 基于椭球曲面拟合的三维磁罗盘误差补偿算法[J]. 中国惯性技术学报, 2012, 20(5): 562-566.
Zhu Jianliang, Wang Xingquan, Wu Panlong, et al. Three-Dimensional Magnetic Compass Error Compensation Algorithm Based on Ellipsoid Surface Fitting[J]. Journal of Chinese Inertial Technology, 2012, 20(5): 562-566.(in Chinese)
[14] 韩兰懿, 米松林, 潘建军, 等. 一种无人机罗差修正方法[J]. 航空计算技术, 2013, 43(3): 69-72.
Han Lanyi, Mi Songlin, Pan Jianjun, et al. Method of Compass Correction of Certain UAS[J]. Aeronautical Computing Technique, 2013, 43(3): 69-72.(in Chinese)
[15] 段晓倩, 裴东兴, 祗会强, 等. 基于磁矩梯度张量的单点定位方法[J]. 兵器装备工程学报, 2019, 40(8): 165-169.
Duan Xiaoqian, Pei Dongxing, Zhi Huiqiang, et al. Single Point Positioning Method Based on Magnetic Moment Gradient Tensor[J]. Journal of Ordnance Equipment Engineering, 2019, 40(8): 165-169.(in Chinese)
[16] Sui Y Y, Leslie K, Clark D. Multiple-Order Magnetic Gradient Tensors for Localization of a Magnetic Dipole[J]. IEEE Magnetics Letters, 2017, 8: 1-5.
[17] Zhao J X, Sang C L. An Eigenvalue Localization Set for Tensors and Its Applications[J]. Journal of Inequalities and Applications, 2017(1): 59.
[18] Jin H H, Zhuang Z H, Wang H B. None-Asphericity-Error Method for Magnetic Dipole Target Detection[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(8): 1294-1298.
[19] Fang J C, Sun H W, Cao J J, et al. A Novel Calibration Method of Magnetic Compass Based on Ellipsoid Fitting[J]. IEEE Transa-ctions on Instrumentation and Measurement, 2011, 60(6): 2053-2061.
[20] 馮彦, 蒋勇, 孙涵, 等. 地磁场水平梯度及高空地磁场的计算与分析[J]. 地球物理学进展, 2013, 28(2): 735-746.
Feng Yan, Jiang Yong, Sun Han, et al. Calculation and Analysis of Geomagnetic Field Horizontal Gradients and High Altitude Geomagnetic Field[J]. Progress in Geophysics, 2013, 28(2): 735-746.(in Chinese)
[21] 杨卓明, 仲伟志, 张俊杰, 等. 基于遗传算法的无人机协作波束赋形[J]. 航空兵器, 2022, 29(6): 95-101.
Yang Zhuoming, Zhong Weizhi, Zhang Junjie, et al. Collaborative Beamforming of UAV Based on Genetic Algorithm[J]. Aero Weaponry, 2022, 29(6): 95-101.(in Chinese)
Magnetic Calibration Method Based on Magnetic
Gradient Measurement
Abstract: Before aircraft heading measurement by using a tri-axial magnetic sensor or magnetic anomaly detection, magnetic interference calibration of the magnetic sensor is required. In order to avoid the degradation of calibration accuracy due to the short-time fluctuation of the geomagnetic field, an interference calibration method for magnetic sensors using magnetic gradient measurement is proposed based on the geomagnetic field gradient distribution characteristics in near-earth space. A 24-parameter interference model for magnetic interference of the magnetic gradient measurement system is established, and a multivariate nonlinear equations is constructed based on multiple arbitrary rotations of the ellipsoidal fitting method for a single sensor, then by the solution of the nonlinear system equations using a genetic algorithm with higher region search efficiency. The simulation results show that, compared with the traditional ellipsoidal fitting calibration method, this proposed method overcomes the influence of short-time fluctuations of the geomagnetic field, and improves the calibration accuracy of the magnetic gradient measurement system, whose differential magnetic gradient measurement error can be calibrated to [1.848 2 1.845 3 1.915 0]T nT. This study provides a reliable guarantee for the carrier interference compensation and high-precision measurement of the aero magnetic system.
Key words: magnetic gradient measurement; magnetic interference calibration; genetic algorithm; tri-axial magnetic sensor; ellipsoidal fitting; azimuth measurement; aircraft
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:10
测控技术(2018年2期)2018-12-09 09:00:54
电子制作(2018年2期)2018-04-18 07:13:25
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:42
智能系统学报(2015年4期)2015-12-27 09:38:39
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12