
基于CTC3.0系统的本务机车摘挂功能优化方案研究与实现
2024-04-16 09:20李华荣冯振国
铁道通信信号 2024年4期
陈 宣,李华荣,冯振国
CTC3.0 系统调车进路以作业单中的调车钩计划为依据,生成调车进路序列指令集,实现进路指令触发和安全逻辑检查卡控等功能[1]。本务机车摘挂作业常见于繁忙的枢纽车站,以机车运用计划为依据,包括机车出入库安排和机车摘挂安排等,没有相应的调车作业单和钩计划,无法获取具体的本务机车走行路径信息。因此,长期以来,CTC3.0系统无法有效地将本务机车摘挂作业纳入系统“计划-进路”作业管理体系。车站行车人员仍需以传统的人工点击进路按钮方式,为本务机车摘挂作业办理调车进路,存在错办的可能性,也无法实现CTC3.0 系统的列调冲突检查、安全卡控等功能[2-3]。
对于本务机车摘挂作业,冯振国等[4]提出一种实现方案,通过人工指定机车出入库线和经由线,结合列车计划中的到发股道信息,将摘挂作业转换为调车作业单,生成相应的钩计划,实现调车进路的管理和控制;何敏刚等[5]进一步研究了本务机车调车安全检查方法;陈梵等[6]提出了调车进路办理的改进方法。但上述方案在实际应用中存在人工干预多、操作繁琐等问题,尤其在繁忙的枢纽车站反而会降低工作效率,实用性不强。因此,为满足车站实际应用需求,急需进一步研究本务机车摘挂作业规律,优化CTC3.0系统本务机车摘挂功能。
1 优化思路
1)摘挂作业安排自动化。引入本务机车固定径路和本务机车走行规则,由CTC3.0系统自动生成摘挂调车作业单和钩计划,解决车站值班员摘挂计划安排工作量大的问题。
2)调车进路动态推算调整。在办理本务机车调车进路时,系统根据车站信号设备实时状态,采用动态推算调整算法,自动推算合理进路,降低信号员人工修改调车进路计划的工作量。
3)作业闭环管理自动完成。通过跟踪本务机车位置,识别调车进路状态,自动完成摘挂作业流程的闭环管理。
2 摘挂作业安排自动化
本务机车摘挂调车作业单和钩计划的生成,依赖于列车摘挂作业中的关键参数,这些参数由六元组<TN,DIR,TP,SL,DL,PL>进行抽象定义,六元组参数定义见表1[7]。其中,TN、DIR、SL可通过列车计划自动获取,其余参数由人工获取。本文以某机务段和车站为例,主要分析参数TP、DL、PL,自动推算选择方法。某车站站型示意见图1,该站含4股道(Ⅰ、Ⅱ道为车站正线)和2 条出入库线(机务段1、2),车站南北侧分界点位于车站股道中点。

图1 某车站站型示意
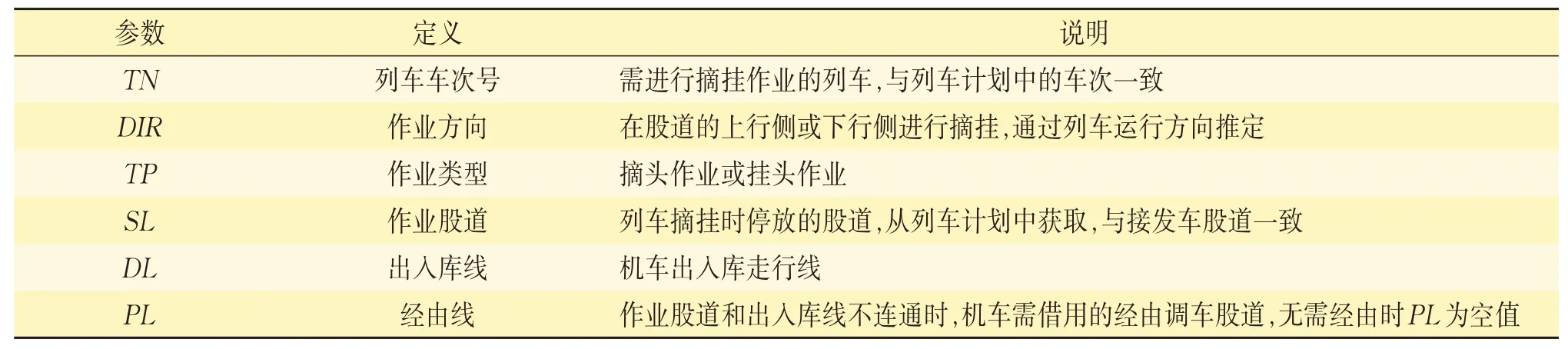
表1 列车摘挂作业参数
2.1 本务机车固定径路
在客运枢纽车站的调研中发现,本务机车摘挂作业有较强的规律性,主要体现在两方面:①每天有摘挂作业的列车基本固定且相同;②对于给定列车,其入库/出库线基本固定。因此,可预设本务机车固定径路参数,见表2。
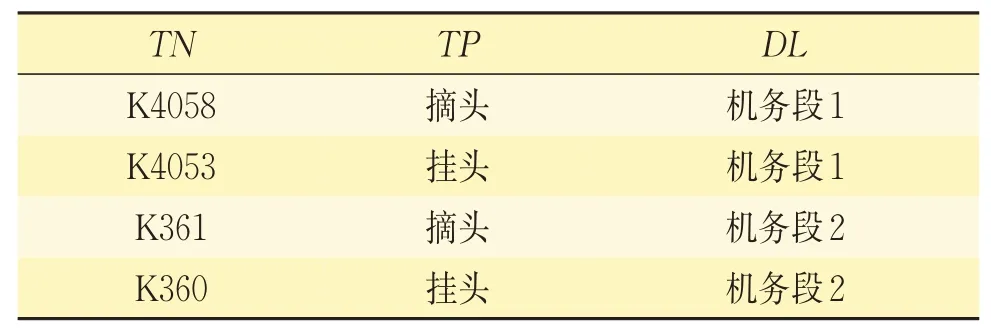
表2 本务机车固定径路参数
将本务机车固定径路定义为一个三元组集合{<TN,TP,DL>}。集合元素的索引是<TN+TP>,即对指定车次和作业类型(摘头/挂头),可唯一确定一条出入库线。因此,可结合列车计划,按以下规则自动推算TP、DL。
1)摘头规则:对于列车终到和到开计划,TP为摘头,以<TN+TP>搜索本务机车固定径路,确定唯一的DL。
2)挂头规则:对于列车始发和到开计划,TP为挂头,以<TN+TP>搜索本务机车固定径路,确定唯一的DL。
如果以上述<TN+TP>的索引在本务机车固定径路中找不到相应记录,则说明该列车无需摘挂作业,系统不需要生成摘挂调车作业单。作业单中列车股道与列车计划的到发股道一致,出入库线从本务机车固定径路中获取,车站值班员无需人工为每一趟列车安排摘挂作业。
2.2 本务机车走行规则
本务机车出入库的调车进路办理分3 种情况:①列车股道和出入库线直接连通,此时可通过一组调车进路直接完成作业,如机车从4 道进入机务段2,可通过进路X4—D36完成;②列车股道和出入库线通过牵出线间接连通,此时可由一组牵出加一组推入进路完成作业,如机车从4 道北侧入机务段1,需使用牵出线D9G,通过牵出进路S4—D9加推入进路D9—D11 完成;③列车股道和出入库线不连通,此时需经由另一条调车股道(经由线)完成作业,如机车从3道南侧入机务段1,需经由4道完成作业。
前2种情况无需经由线,PL定义为空值;第3种情况下经由线可通过本务机车走行规则自动推算。本务机车走行规则需根据站型规划编制,见表3。将本务机车走行规则定义为一个五元组的集合:{<{SL},DIR,TP,DL,{PL}>};依据给定的输入索引<SL+DIR+TP+DL>,唯一确定可用的经由线PL集合,即与作业股道(根据作业方向确定的车头位置)和出入库线直接或间接连通的所有调车股道的集合;再结合相关条件选取一条最优的经由线。

表3 本务机车走行规则示例
最优经由线选取条件包括:
1)经由线优先级。走行规则中的可用经由线集按优先级排序,优先选择排序在前的。经由线优先级一般按就近、避让正线原则[8]排序。例如,规则“上行入库2”中,正线Ⅰ/Ⅱ道排序在3/4道之后。
2)优先级动态调整。在走行规则定义的静态优先级基础上,根据经由线使用的次数赋予不同的权重,根据权重调整优先级。
3)避让本车接发股道。出入库穿行的经由线通常应为空线(无车占用),因此应避免使用本车占用的接发股道。
4)根据站场占用情况实时调整。在办理进路时,如果系统检测到原选取的经由线有车占用,则需按优先级次序选取空闲且优先级最高的经由线。
2.3 本务机车摘挂调车作业单自动生成
如图2 所示,结合列车计划、本务机车固定径路、本务机车走行规则、经由线选取算法,CTC3.0 系统可自动生成摘挂调车作业单,并根据作业单自动推算牵出线和调车进路[9]。以K4053次4 道下行发车的挂头作业为例生成的本务机车摘挂调车作业单示意见表4。
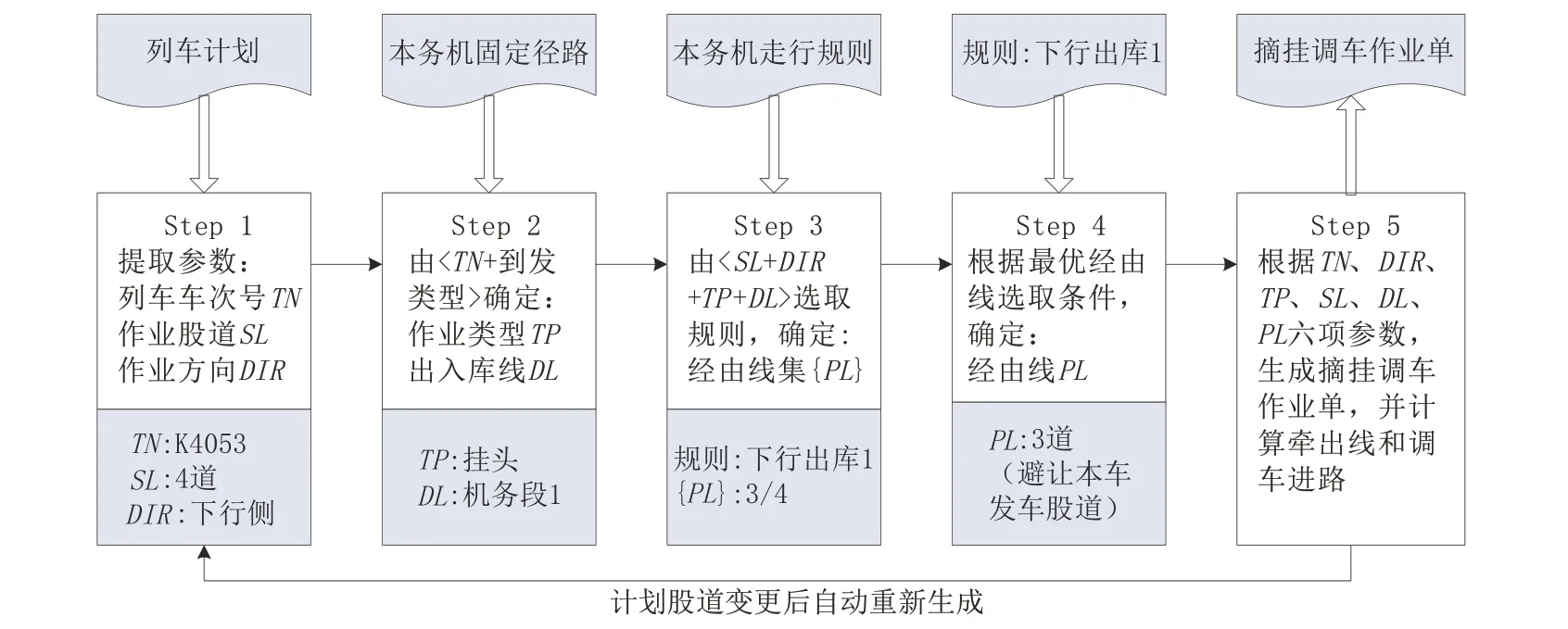
图2 本务机车摘挂调车作业单自动生成示意

表4 本务机车摘挂调车作业单示意
Step 1从列车计划中提取参数:TN、SL、DIR。
Step 2由列车计划到发类型确定摘挂作业类型TP,并根据<TN+TP>搜索本务机车固定径路,获取出入库线DL。
Step 3以<SL+DIR+TP+DL>为索引,选取本务机车走行规则,确定经由线集{PL}。
Step 4根据最优经由线选取条件,确定经由线PL。
Step 5根据TN、DIR、TP、SL、DL、PL6 项参数,生成摘挂调车作业单,并计算牵出线和调车进路。
该自动生成过程中基本不需要车站值班员人工参与。值班员仅需监控经由线的使用,在系统自动选取不合适时进行人工调整。同时,如果列车接发股道变更,CTC3.0 系统也可依据上述步骤自动重新生成摘挂调车作业单,无需人工干预,可大幅降低值班员的工作量。
3 调车进路动态推算调整
CTC3.0 系统调车进路排列的优先级低于列车进路排列。在繁忙枢纽车站实际办理本务机车摘挂调车进路时,计划层面自动选取的经由线、牵出线和调车进路,往往由于其它列车占用或列调冲突无法使用,需信号员人工干预。
调车进路动态推算调整算法是一种辅助决策方法,核心思想是由CTC3.0系统根据信号设备实时状态和列车计划,辅助信号员办理进路。在辅助决策中,系统考虑的因素有:①经由线或牵出线处于空闲状态;②待办理进路满足联锁信号逻辑条件;③待办理进路与列车计划无冲突。调车进路动态推算调整算法流程见图3,具体步骤如下。

图3 调车进路动态推算调整算法流程
Step 1判断目标线路是否处于空闲状态,若是,转入Step 4。
Step 2依据待办理进路类型推算备用线路集:对于牵出进路,备用线路集是所有与进路起始和目标股道均直接连通的牵出线集合;对于推入进路,备用线路集是走行规则定义的可用经由线集合。
Step 3在备用线路集中选择一条空闲的线路作为目标线路。
Step 4根据站型和进路表推算可用进路集。
Step 5在可用进路集中选择可用进路,并确定进路是否满足联锁信号逻辑条件,且与列车计划无冲突。
Step 6预览显示可用进路,推算调整完成。
采用调车进路动态推算调整算法,CTC3.0 系统可过滤实时无法办理或不合理的牵出线和调车进路,筛选出当前可办理的最优进路。可进一步减轻信号员工作量,减少人工误操作的可能性。
4 作业闭环管理自动完成
本务机车摘挂是一项列调融合的车站作业[10],其自动闭环管理步骤为:①在列车计划中安排摘挂作业,列车到达后启动摘头作业,列车准备出发前启动挂头作业;②安排本务机车走行计划;③办理本务机车摘挂调车进路,本务机车按进路走行;④本务机车到达指定位置后,设置摘挂作业完成;⑤更新列车计划中作业状态,完成接车或发车作业。
在上述过程中,CTC3.0 系统通过自动判定列车作业状态、本务机车号跟踪、调车进路状态识别等功能,实现摘挂作业全自动闭环管理。部分作业状态识别逻辑如下。
1)摘挂作业启动判定。列车到达股道停稳后自动报点启动摘头作业,待挂本务机车位于出库线时启动挂头作业。
2)调车进路状态识别。通过站场信号设备的占用锁闭状态自动跟踪识别调车进路状态。
3)摘挂调车作业单钩状态识别。依据调车进路状态自动转换,如当牵出进路开始办理时,单钩状态转换为“办理中”;推入进路出清后,单钩状态转换为“完成”。
4)列车摘挂作业完成状态。对于摘头作业,相应摘挂调车作业单第一钩完成后,本务机车已摘下并驶出股道,判定摘头作业完成;对于挂头作业,相应摘挂调车作业单最后一钩完成后,本务机车已到达目标股道并完成挂头,判定挂头作业完成。
5 应用效果
目前,该方案已应用于多个客运枢纽车站,应用效果良好。经现场应用统计,使用CTC3.0系统的本务机车摘挂作业平均操作时长见表5。列车摘挂作业安排、调车进路办理、摘挂作业闭环管理等关键业务流程的操作时长,相比于优化前的方案均成倍减少,车站行车人员的工作强度显著减轻,错办进路等人为失误风险也大大降低。
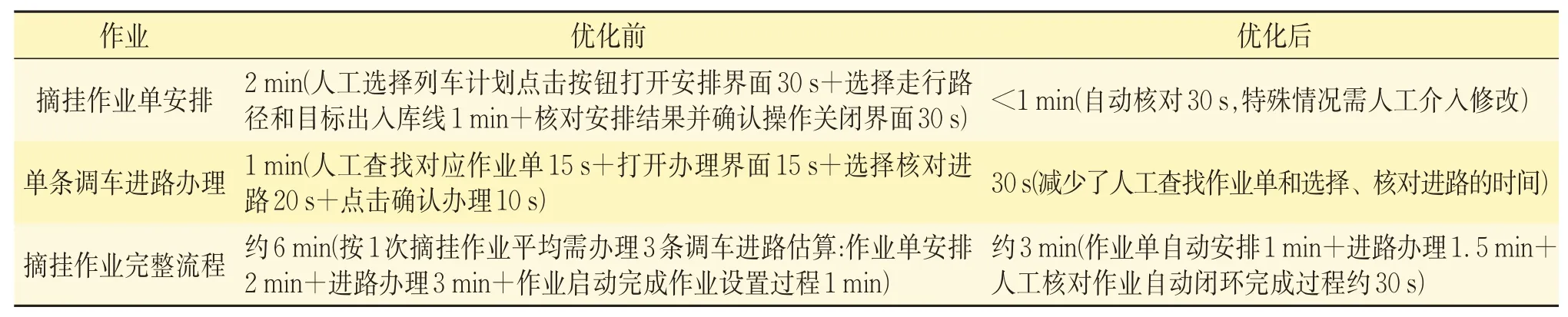
表5 本务机车摘挂作业平均操作时长
6 结论
本文优化方案将列调融合的本务机车摘挂作业完整纳入CTC3.0 系统,充分发挥CTC3.0 系统在运输调度指挥领域计划控制一体化的作用,实用性较强,提升了CTC3.0系统智能化管控水平。
下一步研究方向:对于部分货运枢纽车站规律性不强的本务机车摘挂作业,本务机车固定径路的设定比较困难,需继续探索更为适用的技术实现方案。
猜你喜欢
减速顶与调速技术(2020年2期)2020-11-16
铁道通信信号(2018年7期)2018-08-29
铁道通信信号(2018年5期)2018-06-28
科技风(2018年36期)2018-05-14
中小企业管理与科技·下旬刊(2018年11期)2018-03-19
电子技术与软件工程(2017年5期)2017-04-23
上海铁道增刊(2017年2期)2017-04-18
电信科学(2016年11期)2016-11-23
铁道通信信号(2016年7期)2016-06-06
中国铁道科学(2015年6期)2015-06-21
