
考虑海杂波特征的SAR 图像海上运动小目标检测方法
2024-04-13 06:54胡哲王宁高东明邓杰黄永立
电子设计工程 2024年7期
胡哲,王宁,高东明,邓杰,黄永立
(中国南方电网超高压输电公司广州局,海南海口 570106)
合成孔径雷达(SAR)应用范围广,成像效果好,但是在海面环境下,由于其复杂多变,难以对其进行相关特性的分析,无法实现对目标的检测。随着海洋利用技术的不断发展,近几年来,各国对海洋权益保护日益关注,如何从SAR 海洋图像中提取运动小目标,已成为当前的研究热点。文献[1]提出了基于自适应小波阈值的目标检测方法,该方法使用小波阈值去噪方式,对图像进行去噪处理。通过对点奇异特征函数的最优逼近,使检测结果能够获取最优解。文献[2]提出了基于子带矩阵CFAR 的目标检测方法,该方法以滤波器组对接收信号进行滤波处理,获取多普勒频率。构建基于滤波器组子带分解最大特征值的矩阵,结合双杂波抑制方法解决求解矩阵,获取目标检测结果。
由于在移动平台上观察到的海杂波特征和海浪特征有很大的不同,因此要准确地检测到海面上的运动小目标是非常必要的。因此,提出了考虑海杂波特征的SAR 图像海上运动小目标检测方法。
1 海杂波特征分析
海杂波的运动特征与大多数杂波的运动特征不同,其移动速率随时间、空间而改变,其径向速度具有非恒定性[3]。海洋表面是一种随时间而变的随机过程,其历经度和稳定性都较好[4-5]。通过雷达观察到的波浪传播方向如图1 所示。

图1 波浪传播方向示意图
波浪的传播沿各个方向的能量平均分配,其表达方式为:
式中,φ(E)表示波浪谱;f(θ)表示角度扩展函数。假设主要波浪传播方向是β,由此得到的角度扩展函数为:
由式(2)可看出,假定波浪方向不变,则沿波浪方向,忽略其他方向的海浪分量。β方向具有最大的波浪能量。
2 SAR图像海上运动小目标检测
2.1 SAR图像海杂波抑制处理
移动平台阵列雷达具有高灵活性和大视野[6]。但是,雷达检测造成的多普勒频谱扩展,使得慢目标很容易淹没在多普勒信号中。为了提高运动小目标检测结果,需要抑制海杂波[7-8]。雷达在工作时,将天线分成若干个信道,其中第一个信道作为基准信道,两者之间的距离是相同的[9]。SAR 图像正侧视工作示意图如图2 所示。

图2 运动平台SAR正侧视工作示意图
自适应处理SAR 图像时需要利用空域相位分布差异优化参数,进行海杂波抑制[10]。以现行约束最小方差准则为依据,构建最优自适应海杂波抑制权矢量函数,公式为:
式中,λ表示海杂波抑制权矢量;μ表示海杂波加噪声协方差;ν表示运动小目标和静止海杂波速度矢量;x表示共轭转置;vz表示径向速度。实际上,未检测出运动目标之前并不能预先确定运动目标的精准信息[11-13]。设理想目标矢量与实际目标矢量的适配角余弦为:
式中,νs表示理想目标矢量;表示实际目标矢量。式(2)计算结果越大,海杂波对检测结果造成的影响也就越大[14]。因此,控制适配角余弦,就能抑制SAR 图像海杂波。
2.2 运动小目标检测
经过SAR 图像海杂波抑制处理能够获得干扰较少的海上运动目标信息。在SAR 成像中,采用Sobel算子和形态学方法对SAR 图像进行了海陆分离,以消除地面散射对SAR 图像影响。采用二值化方法对梯度图像进行二值化,并针对不同的应用场景设置适当阈值[15]。在阈值较大情况下,将此像素点视为边缘点。在阈值以下,则将其视为非边缘点;通过形态学上的扩展算子和腐蚀算子,实现了二值化梯度图像的分割[16]。膨胀算子计算公式为:
式中,X表示需要膨胀的图像;Y表示结构元素。腐蚀算子计算公式为:
式中,X表示需要腐蚀的图像;Y表示结构元素。为了进一步缩小区域范围,移动相邻节点,控制节点在领域梯度最小位置处。充分考虑海杂波特征,使用统计平均方式获取海杂波背景下的平均干涉幅度,公式为:
式中,d表示目标与海杂波背景距离;E表示能量参数。平均干涉相位计算公式为:
式中,a表示相位角度。在干涉的二维特征平面上,由于干涉幅度与相位是不同的量纲物理量,所以使用高斯核函数定义的干涉特征距离可表示为:
式中,H、Hs分别表示潜在目标干涉特征和海杂波干涉特征;Gp表示带宽系数;p表示干涉特征向量范数;⊕表示向量外积。在干涉空间中,如果目标与海杂波背景差异明显,那么距离杂波特征越远的向量就越代表其是运动小目标。
3 实验
3.1 不同海况设置
在不同海况情况下,对SAR 图像中的部分海杂波进行了提取,如图3 所示。

图3 不同海况背景
图3 所示三幅图片均选自于某2 号卫星,分辨率为25 m。海杂波背景的灰度分布主要集中在海面上,当海杂波背景面积太小时,其拟合效果不理想。在中等海况和复杂海况下,由于背景灰度值分布已发生了局部的改变,为了使海杂波的拟合尽可能精确,采用100×100 的海杂波区域进行拟合处理。
3.2 检测装置
实验所选取的检测装置为CA-CFAR 检测器,该检测器使用了CA-CFAR 算法,通过提取两个滑窗内的样本数据,求得采样平均值,其基本原理如图4所示。

图4 CA-CFAR检测器原理示意图
由图4 可知,CA-CFAR 检测器能够在不同海况下提取海杂波相关数据,其海杂波数据处理主要通过求和采集来实现。选取少量海杂波背景取样值进行处理,能够有效地去除某些干扰,而且当目标距离很近时,该方法应用效果更好。
3.3 实验结果与分析
在正常海况条件下,使用文献[1]、文献[2]和所研究方法不会受到海杂波影响,检测到的运动小目标不会出现丢失情况,但对于目标位置的检测需要进行对比分析,结果如表1 所示。
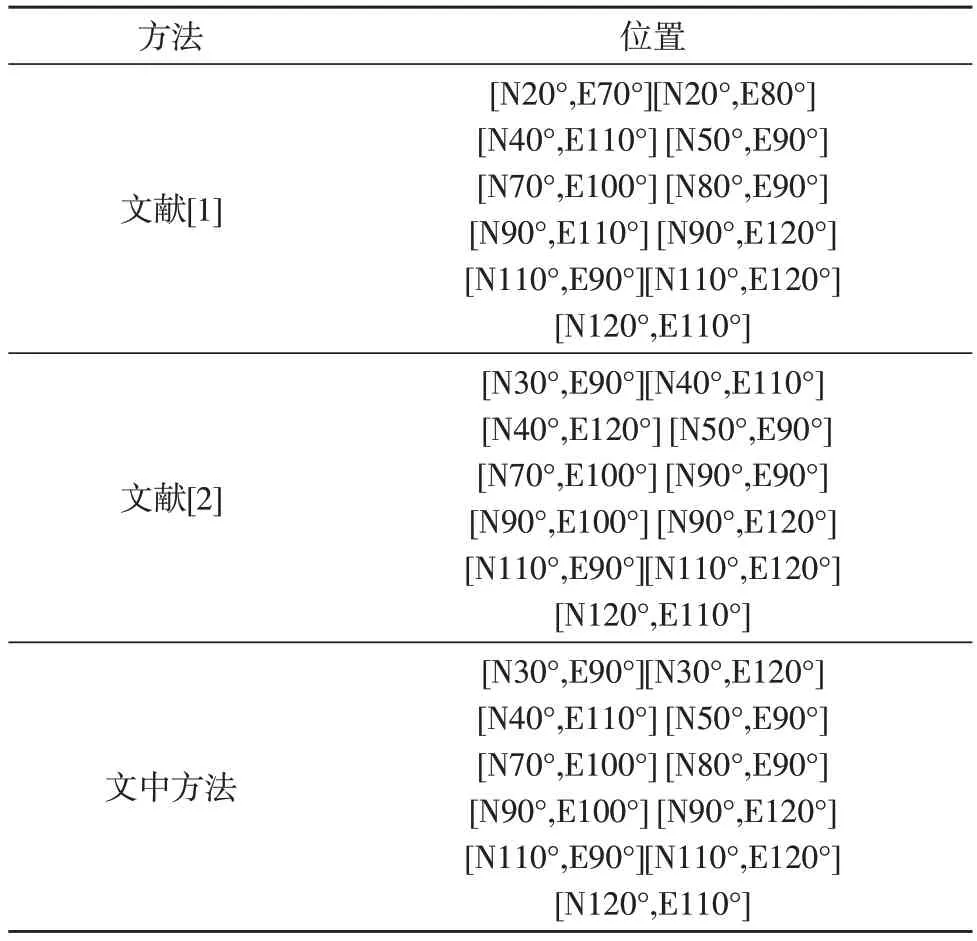
表1 三种方法目标位置检测对比分析
由表1 可知,使用文献[1]、文献[2]的目标位置中均存在三个位置与实际位置不一致,而使用文中方法所有位置与实际位置均一致。
在中等海况和复杂海况条件下,可能会出现运动小目标出现丢失情况。基于此对比三种方法的运动小目标检测结果,如图5 所示。
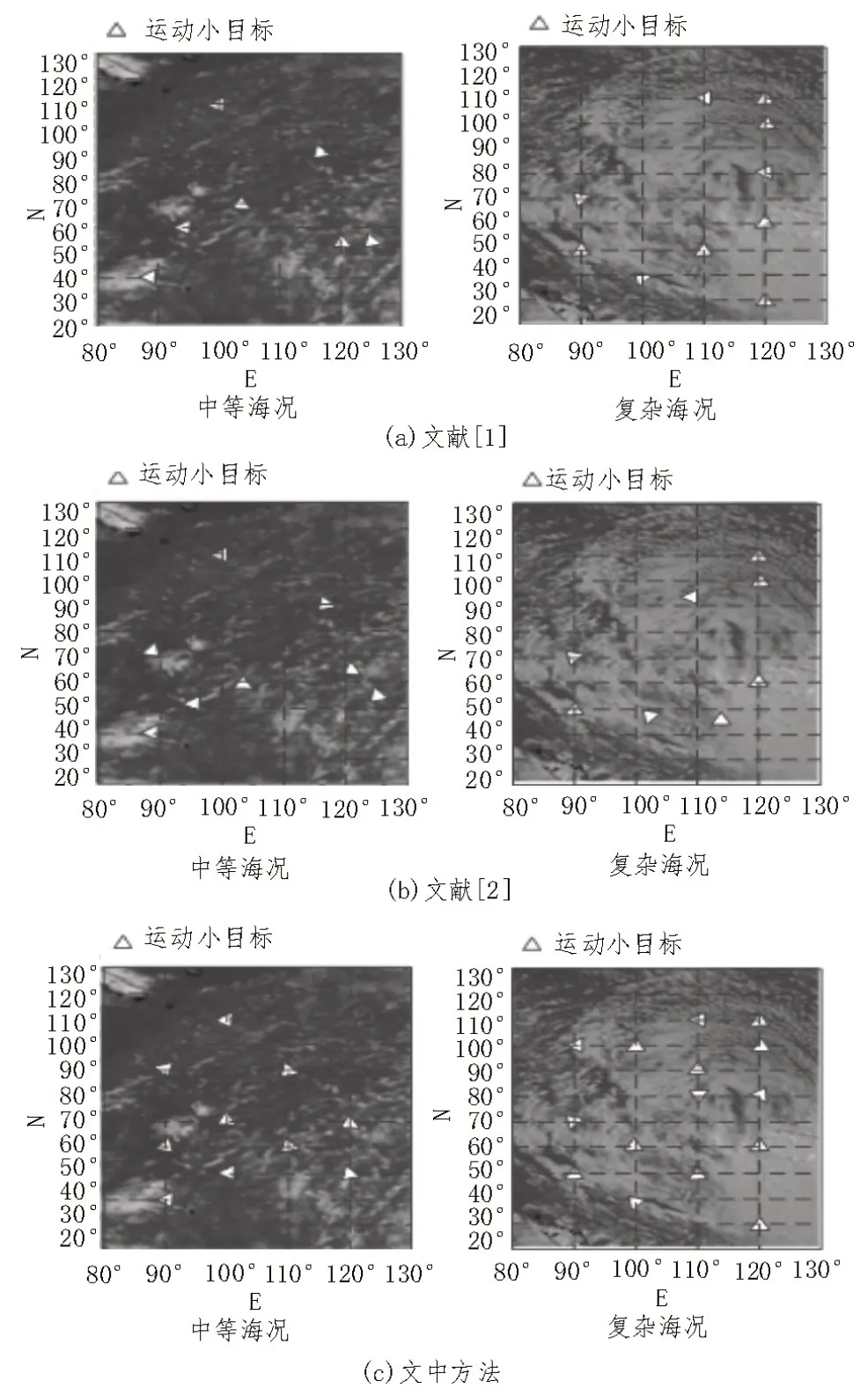
图5 三种方法目标检测结果对比分析
由图5 可知,使用文献[1]、文献[2]目标检测结果出现了丢失情况,且部分位置发生改变,这与实际运动小目标位置不一致。使用文中方法目标检测结果没有出现丢失情况,且位置均与实际位置一致。由此可知,使用文中方法检测结果精准。
4 结束语
在SAR 图像中进行运动小目标检测时,由于传统SAR 目标检测技术存在着能量依赖性,采用了一种结合海杂波特性的SAR 图像海上运动小目标检测方法。有效区分海杂波与海上运动小目标,提高目标检测精度,有助于改善海杂波与实际干扰特征分布的差异。随着观察场景的复杂性和可观察性的持续下降,所提方法的性能将不断下降,相关的动态目标检测技术还需要进一步研究和探索。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
科学与信息化(2021年30期)2021-12-24
装备制造技术(2020年3期)2020-12-25
当代陕西(2020年24期)2020-02-01
小哥白尼(趣味科学)(2018年12期)2018-12-18
船海工程(2015年4期)2016-01-05
西北工业大学学报(2015年3期)2015-12-14
应用海洋学学报(2015年3期)2015-11-22
遥测遥控(2015年2期)2015-04-23
舰船科学技术(2015年8期)2015-02-27
