
蜗壳门模型物理场实时监测
2024-04-11 05:10罗金文唐晓丹李初辉刘绍勇黄天雄胡庆雄
科技和产业 2024年6期
罗金文, 唐晓丹, 李初辉, 刘绍勇, 黄天雄, 胡庆雄
(中国长江电力股份有限公司乌东德水电站, 昆明 650000)
蜗壳门是水轮机的进水部件,把水流以较小的水头损失,均匀对称地引向导水机构,进入转轮。其应具备过水表面应光滑、平顺、水力损失小;保证水流均匀、轴对称地进入导水机构;水流在进入导水机构前应具有一定的环量,以保证在主要的运行工况下水流能以较小的冲角进入固定导叶和活动导叶,减小导水机构的水力损失的作用。若蜗壳门出现异常,将显著影响水轮机中进入效果,影响整个电站的安全稳定运行。因此,水电站运行过程中将其运行状态作为实时监测的目标。针对蜗壳门,应用传统的运行监测手段,虽然能够得到部件运行状态的基本情况,但存在监测点不连续、监测点个数受限,监测数据显著不足、无法展现整体蜗壳门的整体运行状态等问题,仍具备较大的监测盲区。因此,仅仅采用传统检测手段,运维人员对蜗壳门的运行情况了解不够全面。与此同时,运用传统有限元分析技术对蜗壳门的运行状态进行分析,具有分析精度高、结果展示直观、结果丰富且连续的特点。但有限元计算的实时性不强,无法满足运维监测的实时性要求。
为提升蜗壳门的运维监测能力,将传统监测手段与有限元分析技术相结构,再利用代理模型技术、数字孪生技术,形成一套实时性强、精度高、结果丰富且展示直观的蜗壳门物理场实时监测系统,从而拓展了监控测点数量,丰富了监测的结果类型,利用物理场的结果云图将部件运行状态直观呈现,消除监测盲区。通过应用蜗壳门模型物理场实时监测系统,提升了设备运维水平,为水轮机智能化运维提供了坚实的基础。
1 蜗壳门物理场实时监测技术基础
蜗壳门物理场实时监测,以水轮机蜗壳门为基础,利用有限元分析技术构建有限元仿真模型,结合设备运行的工况参数进行有限元分析计算,形成设备运行状态的样本点数据,再利用代理模型技术,构建高精度、高实时性的蜗壳门代理模型。将该代理模型应用于数字孪生系统,最终实现了蜗壳门物理场实时状态的监测。其系统构成如图1所示。因此,蜗壳门物理场实时监测系统的构建主要应用了有限元分析技术、代理模型技术以及数字孪生技术三个方面关键技术。有限元分析技术:实现高精度的有限元仿真模型建立,并形成高精度物理场结果作为为样本点数据;代理模型技术:实现高精度、高实时性的代理模型的构建;数字孪生技术:实现数据采集并调用蜗壳门代理模型完成计算,将物理场结果直观、连续的展示。

图1 蜗壳门物理场实时监测系统构成
1.1 有限元分析技术
有限元分析技术是求解偏微分方程的一种数值计算方法[1-2]。
(1)对于外形复杂的结构,其离散,生成“单元”,并采用多项式的形式,单元内任意一点的位移通过节点的位移表示为
u=Nue
(1)
式中:N为“形函数”;u为单元内任意节点位移;ue为单元的节点位移。
(2)结合单元的形函数和本构关系,可以得到“单元刚度”;将离散单元按总体节点编号规则组装起来,就可得到整体方程如下:
Ku=F
(2)
式中:K为(总)刚度矩阵;F为载荷向量。
求解公式(2)泛函数的最小值即可得到每个节点的位移。
(3)应用平衡方程、几何方程与物理方程,结合模型的载荷边界条件,即可计算出应力、应变、反力等。
平衡方程:

(3)
几何方程:
(4)
物理方程:

(5)
式中:δx、δy、δz、τxy、τxz、τyz为独立的6个应力分量;fx、fy、fz为独立的3个方向的载荷分量;u、v、w为在x、y、z方向上的位移分量;εx、εy、εz、γxy、γyz、γzx为各方向的应变分量;E为拉压弹性模量;G为刚量模量。
1.2 代理模型技术
代理模型技术是通过数学方法,构造一个计算量较小但计算结果与数值分析结果或真实物理实验结果相近的近似数学模型,代替原数值分析模型的一种方法[3-5]。常见的代理模型技术有投影法、机器学习法与深度学习法。
1.2.1 投影法
投影法是基于降阶和代理模型技术的模型优化降阶方法,其代表算法包括克里金模型与响应面模型。其实现过程分为模型生成阶段和模型使用阶段两个阶段,如图2所示。

图2 投影法技术路线
模型生成阶段包含功能需求分析、模型输入设计、样本数据准备、精确物理场模型准备、精确模型有限元计算和构建降阶模型6个模块,各模块具体工作如下。
(1)功能需求分析:对待研究设备进行功能分析,确定待研究目标仿真分析的需求。
(2)模型输入设计:根据研究目标的载荷条件、现场传感器布置情况等,确定影响设备功能和仿真结果的d个因素作为模型输入变量I∈Rd。
(3)样本数据准备:模型输入确定后,可以得到变量的设计空间,在设计空间中使用实验设计方法得到均匀的样本点I(i),i=1,2,…,n。模型有两个输入变量(变量单位与自身属性相关)的情况下,在二维设计空间使用优化拉丁超立方方法。
(4)采用有限元分析技术构建高精有限元分析模型,根据样本点设计方案,准备高精度有限元分析结果,形成代理模型的样本数据。
(5)构建代理模型:针对系统矩阵S进行奇异值分解,得到矩阵S的特征向量φ0。由于前面小部分基向量包含了样本的主要特征,依据能量法截取前面m个基向量φ来近似拟合所有样本空间的特性。在截断后的基φ下,将响应值表示为截断基的线性组合,利用最小二乘法分别计算每个样本点下的截断基线性组合的基系数。由于样本点与截断基的系数之间的对应关系,利用响应面或克里金代理模型建立起样本点与截断基系数之间的近似关系,得到代理模型。
(6)代理模型校验:基于测试样本数据,对形成的代理模型精度进行校验,若精度与效率不满足设计需求,则重新调整样本点,调整算法参数,重新生成代理模型。
在模型使用阶段,当用户给定新的输入条件时,基于投影法形成的代理模型便可以实时获取该输入条件下的预测响应值。
1.2.2 机器学习与深度学习法
基于机器学习模型技术的模型及模型优化方法,其代表算法包括线性回归模型与卷积神经网模型[6]。其实现分为模型生成阶段和模型测试阶段两个阶段,如图3所示。

图3 机器学习或深度学习技术路线
模型生成阶段包含功能需求分析、模型输入设计、样本数据准备、精确仿真模型准备、精确模型有限元计算和构建机器学习模型6个模块,各模块具体工作如下。
(1)前期基于机器学习算法模型的仿真步骤同(1)投影法,同样获得特征矩阵S,矩阵S与其所对应的输入条件组成机器学习的样本数据,作为机器学习模型的输入。
(2)对数据进行数据标准化和归一化操作。该方法能够降低数据之间的差异性,进一步提高模型预测的准确性。然后,将数据维度转化为满足机器学习或深度学习模型的输入维度后,将样本数据分为训练集和测试集。
(3)将训练集数据输入到模型中进行训练,通过正向和反向传播,使用梯度下降的方式不断学习,来挖掘数据特征之间的相关性,模型类型可以是机器学习模型,也可以是深度学习模型。
(4)利用测试集数据对训练好的模型进行测试,根据测试的结果,不断调试模型的参数(如学习率、激活函数、卷积核、卷积方式和神经网络的层数等),提高模型的预测效果。
(5)最后根据模型的测试效果,完成最优的机器学习或深度学习模型的搭建,保存最优模型。
在模型使用阶段,当用户给定新的输入条件时,基于机器学习或深度学习形成的代理模型便可以实时获取该输入条件下的预测响应值。
1.2.3 数字孪生技术
数字孪生技术是一种旨在精确反映真实模型状态的虚拟模型技术。其通过构建真实模型的虚拟模型,并配备相关的各种传感器数据,实现虚拟模型实时反映真实模型运行状态[7-12]。数字孪生技术主要包含感知控制、数据集成、虚拟模型状态展示等关键技术。
(1)感知控制:主要通过部署关键部位的传感器,实时采集真实模型的运行状态。
(2)数据集成:实现了真实模型与虚拟模型间运行数据的互联互通,并结合真实模型的特征将其反映到虚拟模型的载荷条件上,实现真实模型与虚拟模型间无缝衔接。
(3)虚拟模型状态展示:实现了真实物理模型实时运行状态的映射,丰富了运行状态的监测内容,改善了监测效果,补充了监测数据。
2 蜗壳门物理场实时仿真构建
2.1 蜗壳门有限元仿真与样本构建
蜗壳门的规格为800 mm,采用内开式布局,蜗壳门的补强板采用钢板SX780CF,门座与门盖采用钢板Q345B。利用蜗壳门的3D模型和前处理软件对构建蜗壳门的CAD模型, 建模并进行网格划分得到有限元模型,其中节点数量为422 920,网格数量为384 277,如图4所示。水轮机蜗壳门承受载荷为蜗壳末端水压力、蜗壳门螺栓预紧力为168 kN,沿进人门廊道进行模型截断,周边固支[13-16]。
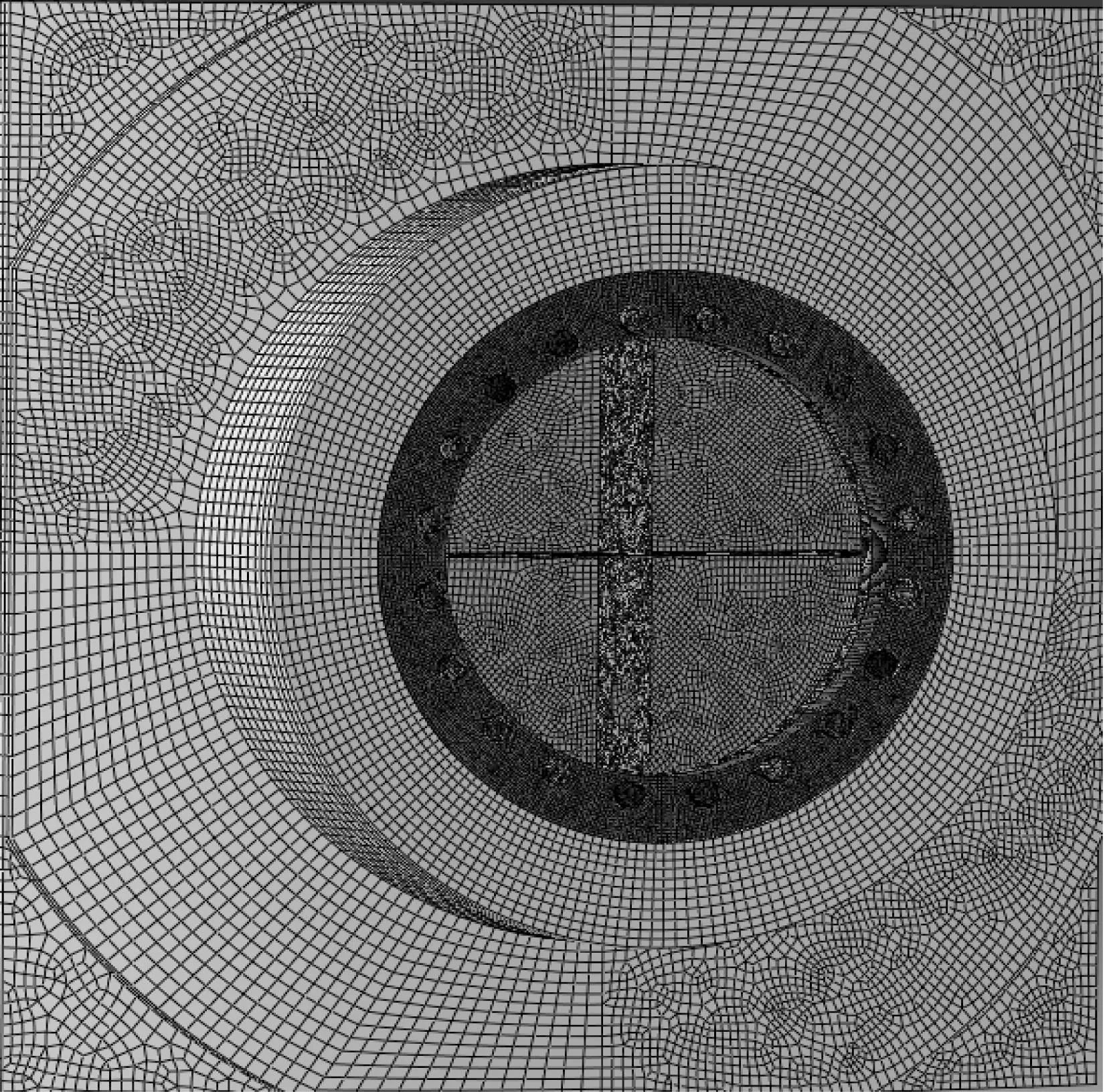
图4 水轮机蜗壳门有限元模型
利用初始有限元仿真模型,在现场工况条件下,计算得到初始有限元模型的仿真结果,同时与进人门盖筋板应变的监测结果进行数据比对,如果精度不满足需求,则对蜗壳门有限元模型的载荷和边界进行修正,再次进行仿真计算,并再次与应变的监测结果进行对比,直至有限元模型的仿真结果精度和与应变的监测结果基本一致,从而获得高精度的蜗壳门有限元仿真模型,其过程如图5所示。

图5 蜗壳门有限元模型校验
根据水轮机的运行特征,可将蜗壳门的运行工况划分为正常运行、过渡过程、异常运行与故障运行,共4种工况。根据水轮机运行的有功功率、蜗壳末端水压力的运行参数划分不同工况。采用设计实验方法,对各工况的驱动因素进行样本点设计,利用高精度有限元仿真模型,计算获得各运行工况驱动因素作用下的蜗壳门仿真结果样本点数据。采用设计实验中的拉丁超立方采样方法,总共得到57个样本点数据,其中部分驱动因素的样本数据如表1所列。

表1 运行工况部分样本数据
2.2 蜗壳门代理模型训练
以蜗壳门稳定运行工况为例,以57个样本点为训练数据,运用克里金模型、响应面模型、线性回归模型与卷积神经网模型,分别进行代理模型构建。应用不同代理模型算法,进行蜗壳门训练所需时间如表2所示。

表2 模型训练时间
2.3 蜗壳门代理模型的效率与精度
对比代理模型与有限元模型的计算时长,评估代理模型的计算效率,如表3所示。同时应用有限元仿真与代理模型技术,对蜗壳门模型进行物理场计算,并采用最大误差(Lmax)、均方根误差(NRMSE)与判定系数(R2)三种评估指标。其中蜗壳门关键的仿真结果包括合位移(magnitude),冯米塞斯应力(mises),X、Y、Z方向正应力(S11、S22、S33),X、Y、Z方向位移(u1、u2、u3)。

表3 蜗壳门模型的物理场计算效率对比

表5 顶盖物理场实时监测结果类型
(1)最大误差校验:

(6)
(2)均方根误差校验:

(7)
(3)判定系数校验:

(8)

通过比较可知,蜗壳门模型采用代理模型计算,计算时长缩短到毫秒级别,相较于传统有限元计算,计算效率提升显著;在计算精度方面,代理模型计算的结果相对于有限元分析,各类分析结果的最大误差、均方根误差均小于1%,判定系数均大于99%。由此可知,采用代理模型计算,在保证物理场计算精度的前提下,显著提升了计算效率。
3 蜗壳门场实时监测应用
3.1 蜗壳门物理场实时监测界面
将蜗壳门的代理模型与某水轮机物理场监测系统相结合,成功构建了蜗壳门的数字孪生系统,从而构建出蜗壳门的高精度、高实时性的数字孪生任务。运维工程师可通过监测蜗壳门数字孪生任务的执行情况,直观地观察到蜗壳门的实时物理场仿真结果。蜗壳门模型在线监测界面如图6所示。

图6 蜗壳门物理场监测界面
3.2 蜗壳门物理场实时监测结果
随着蜗壳门物理场实时监测系统的运行,可实时得到蜗壳门模型的应力类、位移类物理场结果,以及关注位置(虚拟测点)结果、物理场特征值提取结果等。
3.2.1 顶盖物理场结果展示
运维人员可通过切换结果数据类型,查看蜗壳门的多类物理场实时监测结果;可通过旋转、平移、缩放等操作,调整结果查看的视角,如图7所示。
3.2.2 蜗壳门物理场虚拟测点
蜗壳门物理场监测系统中,可根据需要人为标注关注应力、位移等的关键位置并定义为虚拟测点,即可通过物理场实时仿真过程获得该位置的实时计算结果,从而补充了监测点,消除了监测盲区。蜗壳门物理场虚拟测点定义界面如图8所示。
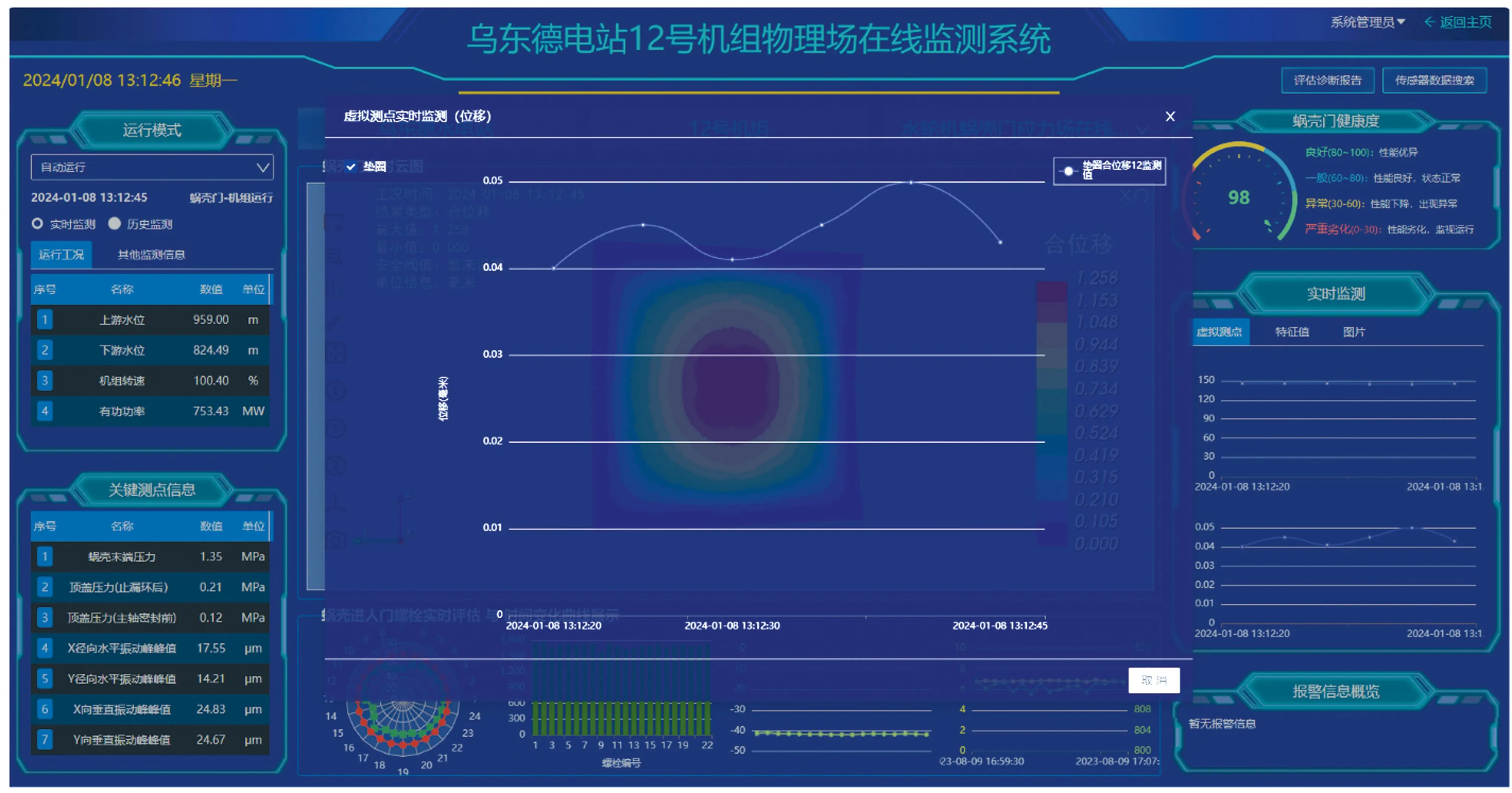
图8 顶盖物理场虚拟测点
4 结论
通过应用有限元仿真技术,并结合现场监测的应变数据,构建高精度的蜗壳门有限元模型并以蜗壳门运行条件为基础,形成高精度的有限元仿真结果样本点数据。运用代理模型技术,分别采用克里金模型、响应面模型、线性回归模型与卷积神经网络模型,基于样本数据进行模型训练,成功构建蜗壳门物理场代理模型。经验证,蜗壳门物理场代理模型的计算效率达到毫秒级别,能够满足实时仿真计算的要求。各物理场量计算最大误差、均方根误差均小于1%,判定系数均大于99%,蜗壳门物理场代理模型的精度达到了有限元计算的水平。利用数字孪生技术,实现了蜗壳门的物理场模型实时监测,丰富了蜗壳门运维状态监测的手段、改善了监测效果。通过增加了虚拟监测点与特征值提取,解决了真实测点不足,监测存在盲区的问题,有效丰富了监测结果,提升了状态分析、故障诊断的准确性。
猜你喜欢
水泵技术(2022年2期)2022-06-16
水泵技术(2021年6期)2021-02-16
趣味(数学)(2018年12期)2018-12-29
现代营销(创富信息版)(2018年8期)2018-09-08
学生天地(2016年23期)2016-05-17
机械工程师(2015年10期)2015-02-02
水电站机电技术(2014年3期)2014-09-26
机电产品开发与创新(2014年4期)2014-03-11
上海金属(2013年4期)2013-12-20
船海工程(2013年6期)2013-03-11
