
一种伪卫星实现隧道定位的方法及验证
2024-04-01 02:38任科翰王振岭
计算机测量与控制 2024年3期
任科翰,王振岭,郭 政
(中国电子科技集团公司 第54研究所,石家庄 050081)
0 引言
全球卫星导航系统(GNSS)可以提供高精度、全天时、全天候的定位、导航及授时服务,目前全球主要有四大卫星导航系统,分别为美国的全球定位系统(GPS)、中国的北斗导航系统(BDS)、欧洲的伽利略系统(Galileo)以及俄罗斯的格洛纳斯系统(GLONASS)。GNSS下发的卫星信号到达地面时信号强度极其微弱,极易受到各种遮挡物的干扰,因此依靠GNSS实现的定位、导航及授时的服务在视野开阔的室外地带基本得到满足,但是在卫星信号受到阻挡的室内、地下空间、隧道等环境下,卫星导航接收机由于无法正常接收GNSS信号,无法为用户提供可靠的定位、导航及授时服务。
近年来,随着国家西部大开发战略以及道路交通体系的建设,隧道的数量与日俱增,隧道的复杂度也越来越大。隧道的管理与风险的管控就显得尤为重要,而隧道内定位是隧道管理与风险管控的前提和基础,因此对于隧道内定位的需求也越来越紧迫。目前国内对于车辆、列车、行人等实现定位主要依靠卫星导航融合惯性导航的方法实现,但是在GNSS信号拒止的隧道内,由于无法接收GNSS导航信号,没有办法通过卫星导航即时对定位结果进行修正,由于惯导具有误差的累积性,仅依靠惯导实现定位的精度会越来越差,最终导致不可靠的定位结果[1-2]。
为解决隧道定位的难题,国内外众多专家学者进行了相关研究,提出了许多解决方案。目前研究和应用较为广泛的技术包括:超宽带(UWB)定位[3-4]、ZigBee定位[5]、RFID定位[6]、LED定位[7]以及利用GNSS伪卫星实现定位[8-12]等,超宽带定位技术具有精度高、穿透力强、功耗低、抗多径效果好、系统复杂度低等优点,但是其价格昂贵、不容易集成;ZigBee定位技术具有功耗低、成本低、效率高等有点,但是其完成隧道定位所需的定位节点数量大且网络复杂,不易实现;RFID定位技术具有体积小、造价低、定位精度高等优点,但是其定位距离短、不容易整合,也无法大规模应用在隧道场景下;LED定位技术的定位速度快、定位精度高、定位实时性好、投入较少,但是技术成熟度不高,技术不稳定,容易受到无关光纤干扰,具有局限性。利用GNSS伪卫星实现定位的方案相较于其他定位技术而言,不需要布设过多的基站设备,且终端不需要增加额外的传感器,成本更低且具有普适性,同时可以实现隧道内外定位无缝衔接,所需的信号发射功率更低、信号的抗干扰能力更强[13],优点明显。
本文基于GNSS伪卫星定位的基本思路,提出一种利用漏缆+伪卫星的隧道内定位方法,通过伪卫星产生特定的定位导航信号,再通过漏缆向隧道内辐射卫星信号,在隧道中搭建了性能良好的导航信号环境;通过利用卫星与隧道的夹角求得卫星与隧道内接收机的直线伪距,对接收机解算部分进行对应的修改,实现了隧道内一维定位。该方法所需的卫星信号不需要进行特殊设计,大大降低了信号环境搭建的复杂性[10],同时又不需要在隧道内布设大量基站,大大降低了成本。在满足隧道内定位基本需求的同时,具有普适性和低成本性。
1 隧道内信号环境搭建
隧道为典型的信号封闭场景,GNSS信号由于其传输距离太远以及信号体制等原因,信号到达地面时信号强度十分微弱,仅为-130 dBm,且GNSS信号的穿透性很弱,无法穿透山脉、钢筋混凝土等,因此隧道内接收不到任何GNSS信号。因此实现隧道内定位的首要目标就是在隧道内搭建可以用于定位导航的信号环境。
伪卫星最初的设计应用主要包括两个方面:一是作为卫星导航系统的地面试验验证性系统,为卫星导航系统建设提供论证支撑;二是在GNSS无法覆盖或仅依靠GNSS定位无法满足定位精度需求的场景下用于独立定位系统或辅助增强系统。而在隧道这种无法正常接收GNSS信号的场景下,可以发挥伪卫星作为独立定位系统的优势[14]。
隧道场景还具有狭长性,此特性会导致信号的传播极易受到阻挡,会导致在隧道深处无法接收到于隧道口播发的伪卫星信号;并且随着信号传播在空间中的损耗,会导致一端伪卫星播发的信号强度到达另一端时大大减小,产生严重的远近效应,严重干扰接收机正常接收信号,因此在隧道内伪卫星信号传播不能仅仅靠空气作为媒介。
现在隧道内通常会布设通信漏缆[15],漏缆最初是为了解决地下隧道之类的特殊环境内无线电波难以传输的问题而发展起来的,漏缆是一种特殊的同轴电缆,与普通同轴电缆的区别在于:其外导体上开有作辐射的周期性槽孔。普通同轴电缆是将射频能量从电缆的一端传输到电缆的另一端,并且希望有最大的横向屏蔽,使信号能量不能穿透电缆以避免传输过程中的损耗。但是,漏缆的设计目的则是特意减少横向屏蔽,使得电磁能量可以部分地从电缆内穿透到电缆外。漏缆结构如图1所示。漏缆开口间距非常小而且密集,开口间距在厘米级,信号向外辐射均匀。并且漏缆的传输损耗很低,100 m大概2~3 dB的损耗。因此漏缆非常适合作为隧道内信号传输的媒介,既能保证信号从一端传递到另一端而不被遮挡,又能很好地解决远近效应的问题。
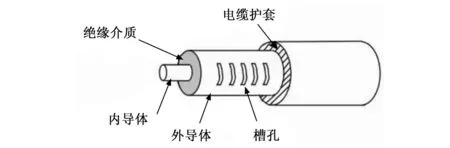
图1 漏缆结构示意图
因此对于隧道内信号环境的搭建设计采用伪卫星+漏缆的方案,利用伪卫星播发卫星信号,再通过漏缆均匀地将信号辐射到隧道内,完成隧道内信号的搭建。隧道内信号环境搭建方案如图2所示。
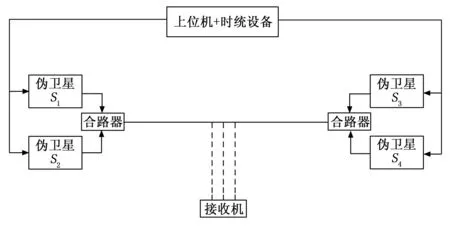
图2 隧道内信号环境搭建示意图
其中,上位机用于控制伪卫星参数、时统设备用于保证伪卫星之间的时间同步;两端的伪卫星首先进行时间同步校正,然后将根据上位机下发的参数进行特定的伪卫星信号生成。伪卫星采用FPGA+DSP的架构实现,其中DSP用于接收上位机下发的参数并生成伪码、导航电文等,FPGA用于根据DSP传递过来的参数生成数字中频信号。随后数字中频信号再经过数模转换后通过射频模块产生最终的伪卫星信号。在隧道顶端布设一根漏缆,漏缆负责将两端伪卫星生成的伪卫星信号向隧道内均匀的辐射,从而将卫星信号延伸到隧道内,使得接收机可以接收到卫星信号并完成定位。
2 隧道内定位算法设计
2.1 卫星信号传播模型
对于上述伪卫星+漏缆的隧道内信号环境搭建的方案,不可避免地改变了模拟的在轨卫星信号直线传播的路径,同时由于本方案所选用的漏缆媒介中信号传播速度仅为光速的88%,因此对于隧道内定位而言,接收机使用的定位算法不再适用,需要进行改进。下面将选取其中一条卫星到接收机的链路来进行分析。
假设伪卫星播发在轨卫星S1的信号,在轨卫星S1、隧道、接收机的几何关系如图3所示。
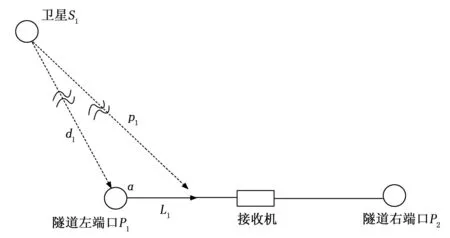
图3 卫星、隧道、接收机几何关系
伪卫星信号从隧道端口进入隧道,假设隧道左端口为P1,隧道右端口为P2。从左端口P1发出的信号到接收机的距离为L1,伪卫星模拟播发的卫星S1到隧道左端口的距离为d1,由此得到接收机接收并解算出的卫星S1信号的实际传播距离为d1+L1。然而卫星S1到接收机的直线伪距为ρ1,假设d1和L1所在直线之间的夹角为α,在这条卫星信号到接收机的链路中,由于隧道的高度远小于卫星距离地球表面的距离,因此,对于夹角α的余弦值可以近似求得:
(1)
接收机是根据卫星信号发射时间和接收时间之差以及结合信号传播速度(正常信号传播速度为光速)来计算伪距。在隧道内使用漏缆来传播卫星信号,虽然固定了信号的传播路径,有效减小了远近效应的影响,但是由于漏缆中信号传播速度小于光速,因此不能够用光速计算L1,这样会造成伪距计算的误差,而应该用信号在漏缆中的传播速度计算L1。
选用的漏缆中信号传播速度为光速的88%,即:v=0.88c=2.638 173 63×108m/s,在100 m长的漏缆中卫星信号的传播误差大小e为:
(2)
其中为c光速,v为漏缆中信号传播速度。根据式(2)可以得出百米长的漏缆的传播误差最大可达13.636 m,会大大影响定位精度。真实的隧道远远不止100 m,1公里长的隧道最大误差可达136 m,并且可见伪距计算误差和隧道长度呈正比关系,因此漏缆传播误差必须进行修正。
漏缆误差的修正体现在伪距计算中,结合式(1)和式(2),应用余弦定理可以求得卫星S1到接收机的伪距为:
(3)
根据伪距相关理论可知,一般伪距观测方程式[16]:
ρ=r+δtu-δt(s)+I+T+εp
(4)
式中,r表示卫星到接收机的真实卫地距,δtu表示接收机钟差,δt(s)表示卫星钟差,I表示电离层造成的信号传输时延,T表示对流层造成的信号传输时延。εp表示伪距观测误差。
结合式(3)和式(4),可以得到用于隧道内定位的单颗星的伪距观测方程式为:
r+δtu-δt(s)+I+T+εp
(5)
2.2 电离层及对流层修正
伪卫星位于隧道两端口位置,且产生的伪卫星信号仅在漏缆以及隧道内空气中传播,未经过电离层和对流层。但是由于本方案采用的是伪卫星模拟播发真实的在轨卫星信号,播发出信号的时延已经包括对流层时延和电离层时延,因此对于接收机而言,还需考虑对流层和电离层的影响。
电离层是由于地球高层大气的原子和分子在太阳X射线、高能粒子和紫外线的作用下发生电离产生正负离子和自由电子,从而形成的等离子体区域[17]。对于全球卫星导航系统,电离层对其系统的定位导航精度会产生不可忽略的影响。由于电离层对电磁波信号的折射率和真空中的折射率不同,因此GNSS信号在穿过电离层时会存在折射效应,GNSS信号不仅传播速度会发生变化,传播路径也会发生扭曲,由此会产生额外的时间延迟,导致接收机观测到的伪距观测量存在误差,影响定位精度。此外,电离层还会导致GNSS信号的相位发生变化,以及信号到达角度的变化,不仅会影响接收机定位精度,同样还会引起测速测姿以及授时的误差[18]。因此对于电离层引起的误差需要得到修正。
对于双频接收机,可以通过双频点对消的方法来消除电离层误差;对于单频接收机,可以采用电离层模型计算的方法来消除电离层误差。本方案采用的是单频接收机,因此适合采用电离层模型计算的方法来消除电离层误差。常用的电离层模型有:Bent模型、IRI模型、Klobuchar模型、Georgiadou模型。其中Klobuchar模型是一种较为简单且实用的模型,适用于中纬度地区以及广播信息星历电离层误差修正,本方案接收机采用Klobuchar模型来对电磁层时延进行修正[19]。
采用Klobuchar模型对于电离层传输时延[20]模型进行修正:
(6)
式中,h表示电离层的高度;R表示地球半径;E为卫星仰角;ξ′表示刺穿电离层的交点处的卫星天顶角,Iz表示Klobuchar模型对电离层修正得到的垂直时延。
对流层位于地球大气的最底层,大气中大部分质量集中在对流层,对流层是大气中最潮湿的一层,对流层底部位于地球表面,对流层向上延伸至海平面以上越10公里[21]。在轨卫星播发的信号不仅需要穿过电离层,还需穿过对流层才能到达用户端,对流层也会对卫星信号传播的速度和路径产生影响,产生传播延迟,即对流层延迟。
根系活力能有效指示植物根系的营养状况以及抵抗外界刺激的能力。低磷胁迫对根系活性物质的影响结果显示(表3),苦荞幼苗根系活力随着磷胁迫强度的增加而下降。与正常供磷处理P1相比,低磷胁迫下(P2),耐低磷苦荞品种的根系活力平均下降了11.77%,而不耐低磷苦荞品种的根系活力平均下降了21.36%;极低磷胁迫下(P3),耐低磷苦荞品种的根系活力平均下降了15.11%,而不耐低磷品种的根系活力平均下降了57.33%。可见,各基因型苦荞抗逆能力存在品种差异,耐性强的苦荞根系活力明显大于不耐低磷苦荞,其降幅也小于耐低磷弱的苦荞,对养分的吸收能力更强。
对于对流层延迟的修正,主要有3种修正方法:外部修正法、模型修正法以及参数估计法[22]。其中外部修正法主要利用外部设备提供的数据,通过对测定的实际卫星信息传播路径上水汽造成的信息传播进行分析的方法,这种方法需要借助特殊昂贵的仪器、同时仪器的精度以及稳定性也会制约外部修正法的普遍应用。参数修正法的复杂度较高,有时需要三到四个参数才能保证计算的精度。因此模型修正法才是对流层延迟修正的最优解。
现在普遍受到认可的模型主要有:Black模型、Hopfield模型、Egnos模型以及Saastamoinen模型。这些模型在不同情况下会有差异,但是精度都很高。
由于导航电文中没有对流层修正相关的参数,试验条件下无法得到获取的星历数据时刻位置的大气数据,因此本方案采用一种简单的对流层传输时延[23]模型进行修正:
(7)
式中,E表示卫星仰角。
不考虑观测误差εp,对电离层时延I、对流层时延T根据式(6)、式(7)进行修正后,得到的隧道定位的伪距观测方程式为:
(8)
2.3 定位解算
传统的接收机定位解算有两种,一种是基于牛顿迭代的最小二乘算法,另一种是卡尔曼滤波算法。本方案提出的隧道内定位算法是对基于牛顿迭代的最小二乘迭代算法进行改进,以适用于接收机在隧道内的定位解算。
接收机实现定位最少需要稳定接收四颗卫星的信号。隧道左右两端口各挂两颗伪卫星,隧道左右两端口的精确坐标可以通过测绘的方法测得,记为(xp1,yp1,zp1)和(xp2,yp2,zp2)。在接收机观测到伪距ρi后,结合隧道两端口P1、P2的精确坐标根据式(1)计算得到每一颗星对应的夹角αi的余弦值cosαi,随后结合漏缆传播误差对伪距进行修正,再利用三角形的余弦定理可以修正隧道内卫星到接收机之间的伪距,最后通过最小二乘迭代算法得到接收机的定位结果。
在上面的章节中,我们分析介绍了一颗伪卫星信号的传播链路,对于接收机定位而言,至少需要四颗卫星的卫星信号。隧道两端的伪卫星为可播发多星的伪卫星机箱,本方案采用四星定位的方式来实现隧道内定位原理,接收机接收四颗卫星定位信号的定位模型如图4所示。
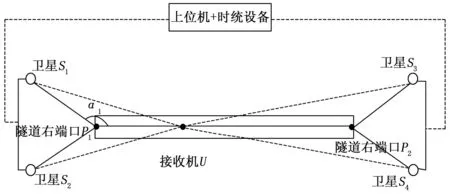
图4 隧道定位示意图
隧道定位的接收机定位解算流程与传统卫星定位解算流程最大的区别就在于两者对于伪距的处理不同。对于隧道定位的伪距处理,首先根据卫星电文结算出来卫星的坐标(xi,yi,zi),再结合已知的隧道两端口P1、P2的坐标(xp1,yp1,zp1)和(xp2,yp2,zp2)求得模拟播发的卫星与各自对应的隧道端口之间的真实距离:
(9)
接收机利用时间差解算出信号传播的时间,假设接收机测得的各个卫星的信号传播时间差为Δti,可以得到:
Δtic=di+Li,i=1,2,3,4
(10)
式中,L1、L2表示接收机在隧道中距隧道左端口P1的沿漏缆方向的一维直线距离;L3、L4表示接收机在隧道中距隧道右端口P2的沿漏缆方向的一维直线距离。由此可以求得:
Li=Δtic-di,i=1,2,3,4
(11)
结合式(1)、式(3)以及式(11)可以求得模拟卫星到接收机的真实伪距为:
(12)
根据最小二乘算法进行迭代解算,可得迭代方程为:
Δx=(GTG)-1GTb
(13)
式中,G矩阵[14]为:
(14)
1(N)为单位观测矢量。
b矩阵为[16]:
(15)
最后,接收机通过迭代到规定的限差,从而求得接收机的定位坐标。
3 方案验证
本方案验证选用走廊环境模拟隧道,走廊东西走向,长度25 m。端,选用25 m长的漏缆,漏缆中信号传播速度为光速的88%。环境搭建以及实验现场如图5所示。

图5 测试场景
3.1 信号环境性能验证
首先需要验证所搭建的信号环境质量的好坏。对于定位的应用需求而言,信号环境的好坏有两个指标可以衡量,一个是接收机接收信号的载噪比,另一个是接收机对信号捕获跟踪的相关峰是否稳定。
载噪比是衡量信号环境优劣的重要指标,反应的是所搭建的信号环境的信号强度是否稳定。为验证接收机接收到卫星信号的载噪比是否稳定,由测试人员携带一台便携式一体机在漏缆环境中来回移动,将接收机的载噪比观测量按秒输出,载噪比变化如图6所示。
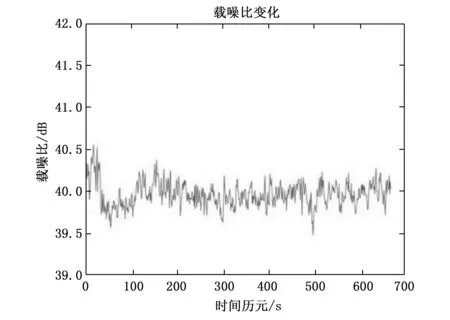
图6 载噪比变化
由试验结果可见,所搭建的信号环境下信号强度稳定,移动状态下波动幅度在1 dB左右,在接收机可接受的误差范围内,信号强度平稳,信号较为稳定,足以支撑接收机进行定位。
接收机在捕获跟踪卫星信号时,码环会复制五份不同相位的随机码,分别为超超前码、超前码、即时码、滞后码、超滞后码。接收机同样会根据这五份不同相位的复制码得到5个相关值,只有即时码的相关值为5个相关值的峰值时,可以认为信号是稳定的。现由测试人员携带一台便携式接收机沿漏缆方向移动,将接收机观测的5个不同的相关值按秒输出,实验结果如图7所示。
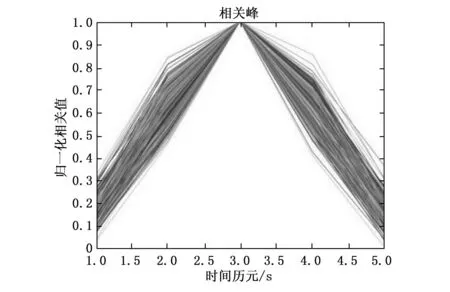
图7 相关峰输出结果
从试验结果可以看出,相关峰的最高值一直稳定在即时码相位上,可见由漏缆向外辐射的信号均匀稳定,可以保证接收机捕获跟踪伪卫星信号相关峰的稳定,从而可以支撑接收机观测到正确的伪距,从而实现定位。
3.2 隧道内定位算法性能验证
上面已经验证了所搭建的信号环境可以支撑接收机定位,下面将对接收机定位性能进行验证试验,对接收机定位性能的验证主要从静态定位和动态定位两个角度去分析。由测试人员携带一台调整过定位算法的便携式一体机沿漏缆方向从一端向另一端移动,接收机定位每秒都将定位结果输出。为了结果分析的方便,以漏缆方向作为x坐标轴,一端的伪卫星作为原点建立起坐标系,将接收机输出的定位结果转换到所建立的坐标系中,定位结果如图8所示。
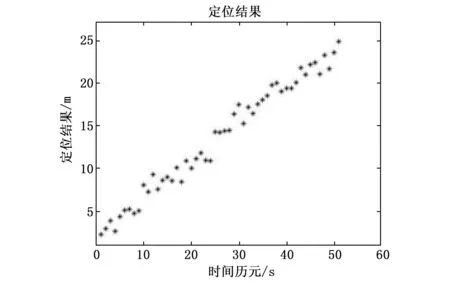
图8 定位结果
从图8中可以看出,此方案所设计的隧道定位算法的动态定位轨迹能够直观反映运动距离。在隧道内可以实现移动状态下的定位。
由于采用走廊模拟的隧道环境,走廊笔直,因此可以将走廊拟合成一条直线呈现在所建立的坐标系下,然后在走廊直线上沿漏缆方向每隔1 m设定一个基准点,基准点坐标可以通过直线获得,然后由测试人员携带接收机在走廊上每隔1 m取一个定位结果,并将定位结果转化到所建立的坐标系内,与基准点坐标相比较,得到沿漏缆方向的移动状态下定位误差,定位误差如图9所示。
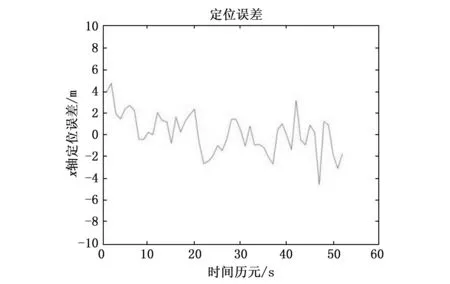
图9 移动定位误差
从试验结果可以看出,沿漏缆方向的移动定位误差最大为4.666 m,误差均在5 m以内,基本满足隧道定位的需求。
下面将对静态定位误差进行分析,分别在漏缆方向的一端以及中点处停滞采样2分钟,得到的沿漏缆方向的静态定位误差如图10、图11所示。
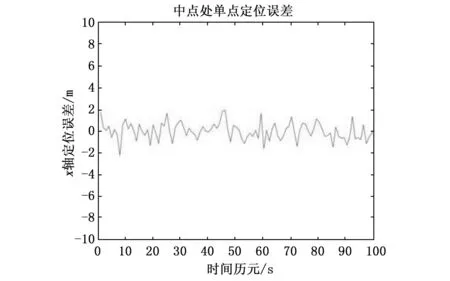
图10 中点处定位误差
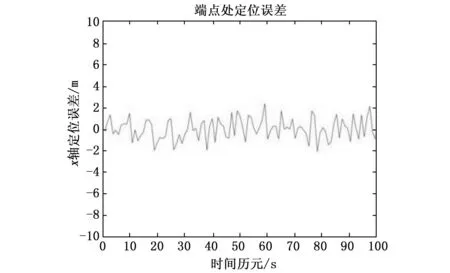
图11 端点处定位误差
从图中可以看出,在漏缆端点以及中点处的定位结果误差最大为2.217 m,静态定位效果良好。从以上的定位误差分析中,无论是静态定位还是移动定位,误差均在5 m以内,满足隧道内定位的需求。
4 结束语
针对GNSS信号遮蔽环境的隧道场景,提出了伪卫星和漏缆实现的隧道内定位方法,该方法利用漏缆和伪卫星对隧道场景中的信号环境进行搭建,同时对接收机定位算法做匹配,最终得到较为理想的定位结果。经过对信号环境性能的试验验证,所搭建的信号环境载噪比稳定,上下浮动不超过1 dB,接收机在所搭建的信号环境中捕获跟踪信号的相关峰稳定,所搭建的信号环境的性能良好,足以支撑接收机进行定位。经过对接收机定位方的试验验证,所设计的隧道定位算法定位轨迹可以直观反映运动轨迹;隧道内单点定位的误差最大为2.217 m,隧道内移动状态下一维定位误差不超过5 m,满足隧道定位的基本需求。
猜你喜欢
区域治理(2021年14期)2021-08-11
大众科学·上旬(2020年4期)2020-10-21
城市建设理论研究(电子版)(2019年12期)2019-10-29
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
载人航天(2016年4期)2016-12-01
铁道通信信号(2016年10期)2016-06-01
成都信息工程大学学报(2016年6期)2016-06-01
导航定位学报(2015年2期)2015-06-05
铁路技术创新(2014年1期)2014-05-10
