
改进型PID算法在磁悬浮控制系统中的应用
2024-04-01 12:15张伦生赵科杰陈澍国
日用电器 2024年2期
张伦生 赵科杰 陈澍国
(珠海格力电器电机系统技术研究院 珠海 519070)
引言
磁浮轴承由于具有无接触和不需要润滑和密封等一系列优良品质,从根本上改变了传统的支承型式。它在能源交通、机械工业、航空航天、机器人等高科技领域具有广泛的应用前景。磁悬浮轴承是涉及机械结构学、转子动力学、控制系统、电磁学等多方面技术,是典型的机电一体化系统。
磁悬浮轴承原理是通过线圈通电产生磁力作用在转轴上使转子悬浮,通常采用PID算法实现压缩机静态和旋转部件间无任何机械接触,保证磁悬浮压缩机稳定运行。当转子受到外界扰动力干扰,会产生位移波动,这时PID算法会通过位移反馈来自动调节控制电流输出,使转子悬浮位置趋于稳定。但是在实际的应用中,常规的PID控制算法存在一些弊端,例如,存在实时参数可调性差、抗干扰能力较弱和容易超调等问题。针对上述问题,本文提出一种更适用于磁悬浮轴承控制系统的改进型PID控制算法,并对其进行仿真研究分析和应用。
1 常规PID磁悬浮控制算法
1.1 单自由度磁悬浮控制原理
一个简单主动磁悬浮轴承的组成部分及其功能一个典型的主动磁轴承是由转子、电磁铁、传感器、控制器和功率放大器组成。传感器检测出转子偏移参考点的位移,作为控制器的微处理器将检测的位移信号变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力从而使转子维持其悬浮位置不变,如图1所示。
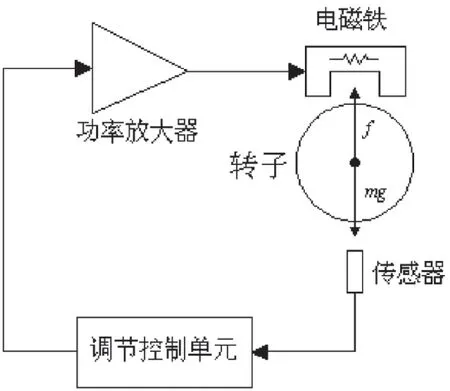
图1 单自由度磁悬浮控制简图
1.2 常规PID算法的磁悬浮控制仿真模型
常规PID算法主要由比例、积分和微分环节组成,误差通过三个环节,产生不同作用的控制量,将三个控制量相加得到总控制量,就可以达到控制的目的。传统的PID算法输出时域表达式为:
根据上式,写成差分方程,即:
在磁悬浮控制系统中,可以通过PID控制算法来实现转子的悬浮,依据磁悬浮轴承的控制系统结构,运用MATLAB/SIMULINK仿真软件可搭建出常规PID控制策略的控制系统结构框图,如图2所示。
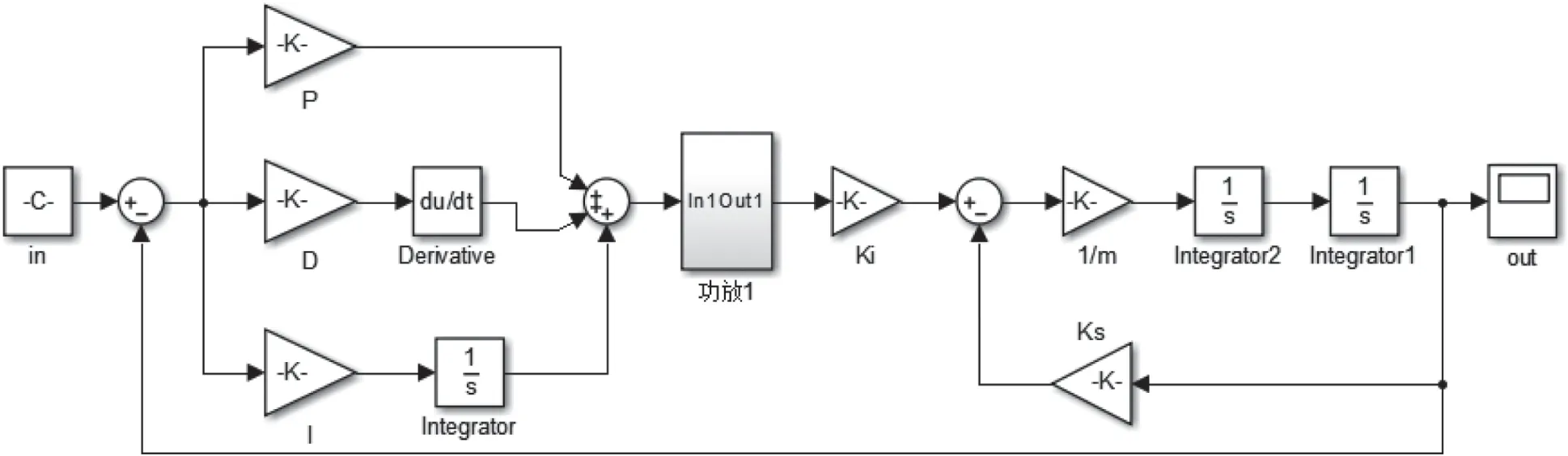
图2 常规PID控制策略仿真模型
2 改进型PID磁悬浮控制算法
改进型PID控制算法主要在比例控制环节、积分控制环节以及微分控制环节进行优化,使其更适用于磁悬浮轴承控制系统,以提高系统的动态响应性能、抗干扰能力和防止控制超调。改进型PID控制算法的表达式如下:
上述算法主要包括变速比例控制环节,梯形积分控制环节以及改进型微分控制环节。
2.1 变速比例控制环节
变速比例控制环节是在常规的比例环节中加入对误差大小的判断与分析,相对应地补偿比例控制环节,以提高系统的响应速度。特别是当磁悬浮转子受到较大干扰或者处于起浮阶段的时候,转子位移误差比较大,此时变速比例控制环节会放大比例控制参数,缩短系统响应时间,及时消除扰动对磁悬浮轴承的影响;当磁悬浮转子悬浮稳定之后或者受到的干扰较小,此时变速比例控制环节会减小比例控制参数,使磁悬浮控制系统的输出小于补偿前控制系统的输出,以避免过度调节造成振荡,缩小调节时间,增强鲁棒性,具体的表达式如下:
将其离散化可得:
式中:
β—补偿系数;
A、B、C和D—人为设定的参数且A<B。
在磁悬浮控制器的软件编程应用中可以按如下流程实现该功能,如图3所示。
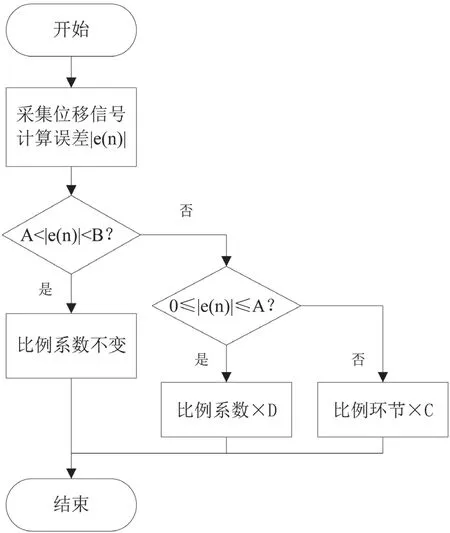
图3 变速比例控制流程图
2.2 改进型积分控制环节
在PID算法中,积分项就是对误差的积累,它的作用就是为了消除稳态误差,故而提高积分项的运算精度能更好的提高磁悬浮轴承的控制精度。在实际的磁悬浮轴承控制器编程应用中,对于积分运算通常使用累加的形式,也就是矩形积分,即如下算式:
但是上述式子在PID算法中并不是这样的,这就要从最原始的PID算法开始说起,其表达是如下:
将其离散化,我们将时间t当做一个时刻,即第一时刻,第二时刻,第三时刻,用k表示,相邻两个时刻之间的时长为T,比如说T=1s,那么第一时刻即k=1时表示第一秒,第二时刻即k=2时表示第二秒,于是:
但是,从严格意义上积分项应该为:
在磁悬浮轴承控制器的软件编程中,为方便编程计算,把系数项全部整合在一块,称之为积分系数,所以就把T省略了。积分从图像上来看,其本质就是求面积。因此在控制器编程中计算积分的思路就是把图形划分为宽度为T高度为e(n)的 n个等份,然后将所有矩形面积相加便可近似为求积分的过程。T越小矩形面积和越接近于积分运算,但在磁悬浮控制工程中,T不可能太小,因为T实际上就是位移信号的采样时间,也是PID的计算周期,T过小会加大控制器的运算负担。所以这样的计算方式精度较低,误差大,对于高精度的磁悬浮轴承控制系统,会产生较大的负面影响,降低转子的悬浮精度。假设偏差error在某段时间服从函数error=-a*t+b,如图4所示。
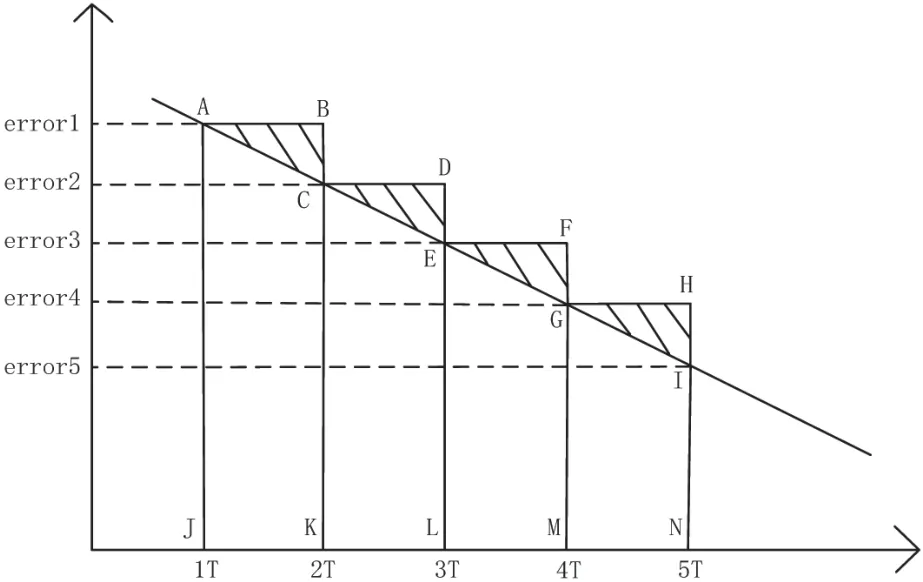
图4 函数error=-a*t+b
那么积分运算就是指:
由此可知,每个矩形上面阴影部分的三角形都参与了计算,这使得积分环节运算的精度大大降低,为避免出现过大的误差或者进一步提高控制的精度,引入改进型积分控制环节,只计算error曲线以下的部分,即梯形的面积,表达式如下:
当偏差error不服从线性关系,或者是其他一些曲线,所以不会像示例中那般毫无误差,仍会有些许误差无法计算到,但是磁悬浮轴承控制器的程序运算的精度已经得到了很大的改善,所以在程序应用中我们可以把控制磁悬浮位移的积分项改为:
2.3 改进型微分控制环节
在微分控制中,磁悬浮轴承控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。可在误差信号出现之前就起到修正误差的作用,有利于提高输出响应的快速性,减小被控量的超调和增加系统的稳定性,常规的微分项表达式为:
由上式可知,微分项的变化量主要和当前的误差与上一次的误差的差值有关。在磁悬浮控制系统中,为防止停浮控制时,轴承转子直接下落导致轴承损伤,往往采用缓慢停浮控制方式,逐减改变转子悬浮的控制位置,直到稳定停浮在轴承底部;或者是在悬浮的过程中,为了避免转子受到外界扰动,往往需要实时的改变转子悬浮的控制位置。但在以上控制过程中,由于改变悬浮的控制位置,会直接引入较大误差变化,微分控制环节出现较大突变,导致控制出现较大超调纹波。对此,我们可以用,即使因改变参考位置出现较大误差也不会直接影响到微分项,该微分项表达式推导如下:
ref(t)为实时参考位置,fdb(t)实时位移信号反馈值输入,两者想减就是误差,当参考位置不变时,,由上式可得:
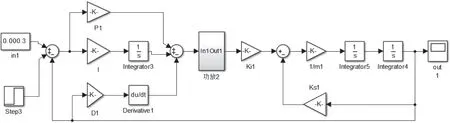
图5 改进型微分控制仿真模型
两种算法的控制参数与转子模型参数均保持相同,待在转子悬浮稳定后,改变其控制位置,对比与常规PID的效果,仿真结果如图6、7所示。
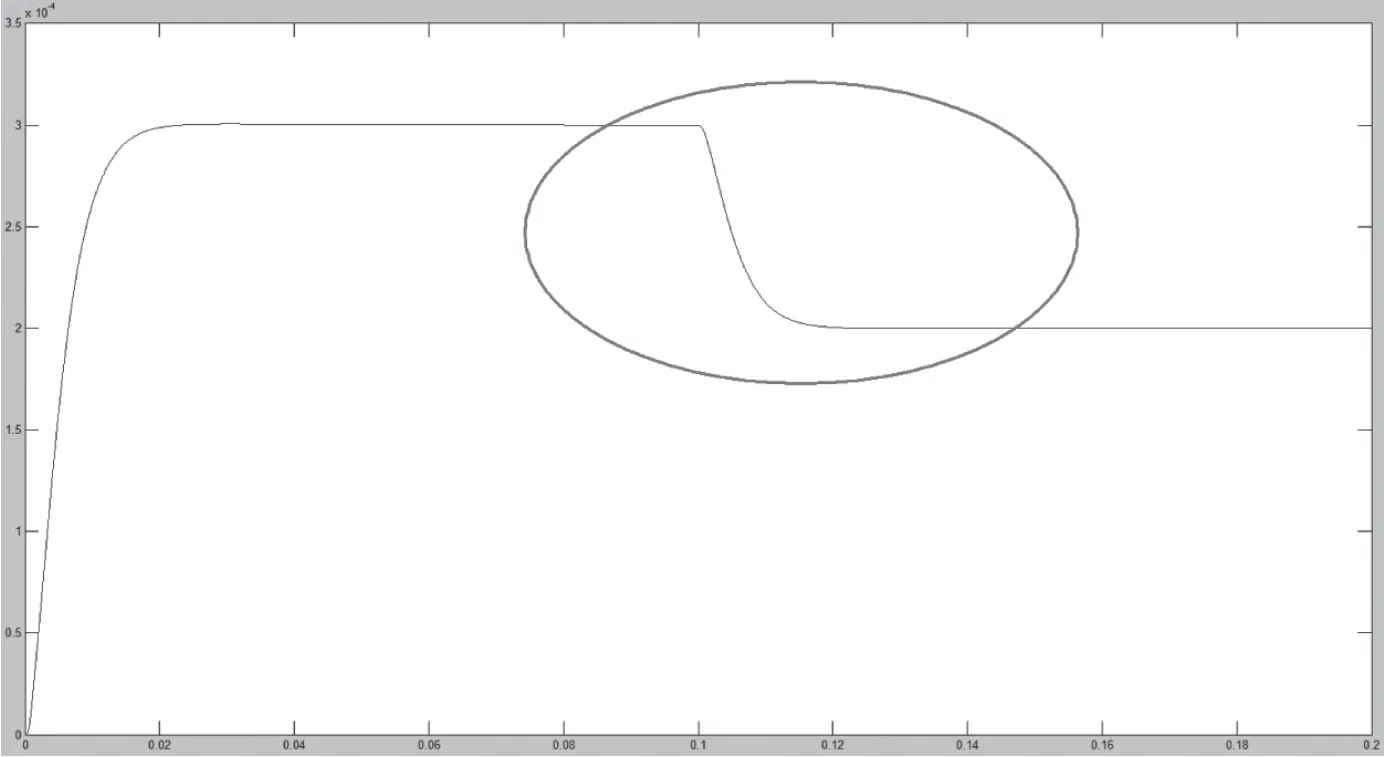
图6 改进型微分控制的位移信号仿真结果
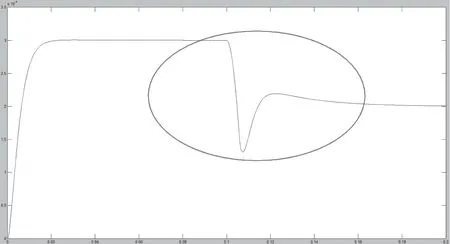
图7 常规PID控制的位移信号仿真结果
分析仿真结果,在改变控制位置时,改进型微分控制的控制效果明显优于常规微分控制,有效减小位移控制超调,防止转子与轴承发生碰撞。
3 两种控制策略的实测控制效果分析
将常规PID算法和改进型PID算法分别编写成程序软件应用到磁悬浮压缩机(图8)的轴承控制系统中,并在转子的静态悬浮阶段和旋转阶段分别进行实验,以验证改进型PID算法的优越性。
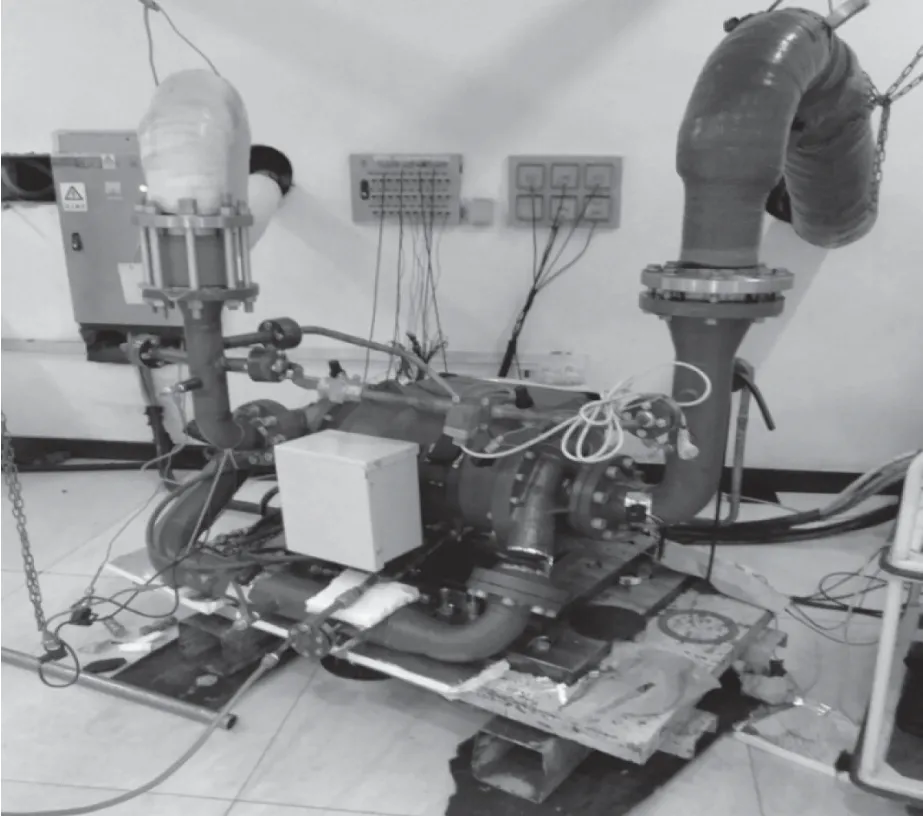
图8 实验用磁悬浮压缩机
3.1 静态悬浮阶段的控制效果分析
控制转子悬浮到指定的位置,这个过程必定会引入一个较大的误差,这时变速比例控制环节会根据此误差来选择不同放大比例系数,改进型积分控制环节会使积分控制更加精准细腻,加快响应速度,另外改进型微分控制环节会大大减小控制的位移超调,两种算法的静态悬浮阶段的控制效果如图9、10。
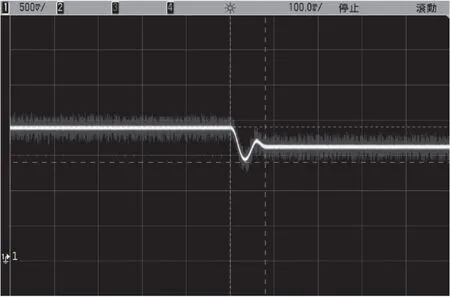
图9 常规PID算法的静态位移信号波形
图9和图10均为采集的位移电压信号波形图,由实验结果可知,采用常规PID算法的响应时间为84 ms,超调量明显;采用改进型PID算法的响应时间仅为25 ms,基本上无超调量。
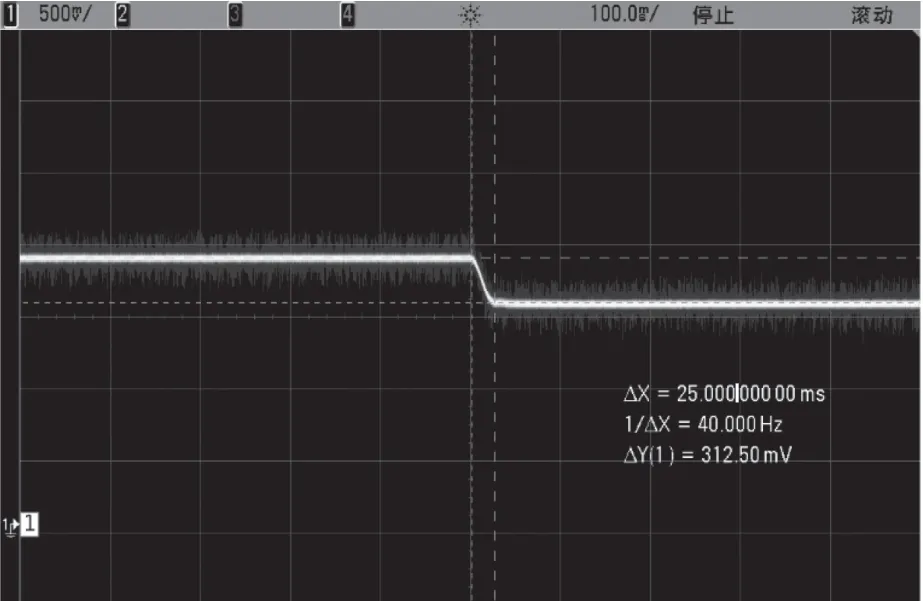
图10 改进型PID算法的位移信号波形
3.2 旋转阶段的控制效果分析
当转子悬浮稳定后,电机控制转子旋转,这时转子在旋转的过程中会产生位移波动,试验中采集了两个方向(转子的前端与后端)的位移信号以分析验证改进型PID算法的动态响应性能,两种算法的旋转阶段的控制效果如图11、12。
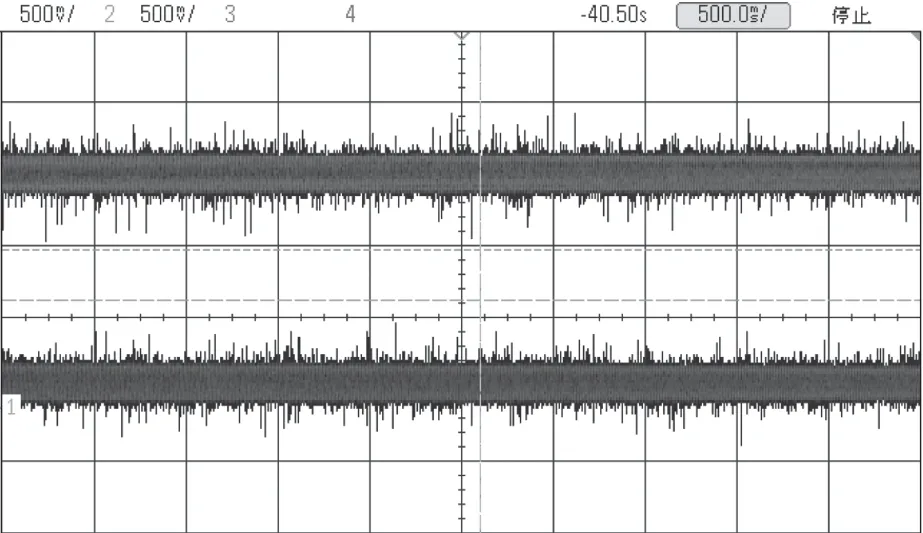
图11 常规PID算法的动态位移信号波形
由图11和图12的实验结果可知,采用常规PID算法的前端位移电压信号波动为330 mv,采用常规PID算法的前端位移电压信号波动为208 mv,而位移电压信号直接反映了转子悬浮的精度,所以,相对于常规PID算法,在相同转速下,转子的悬浮精度提高了约37 %。
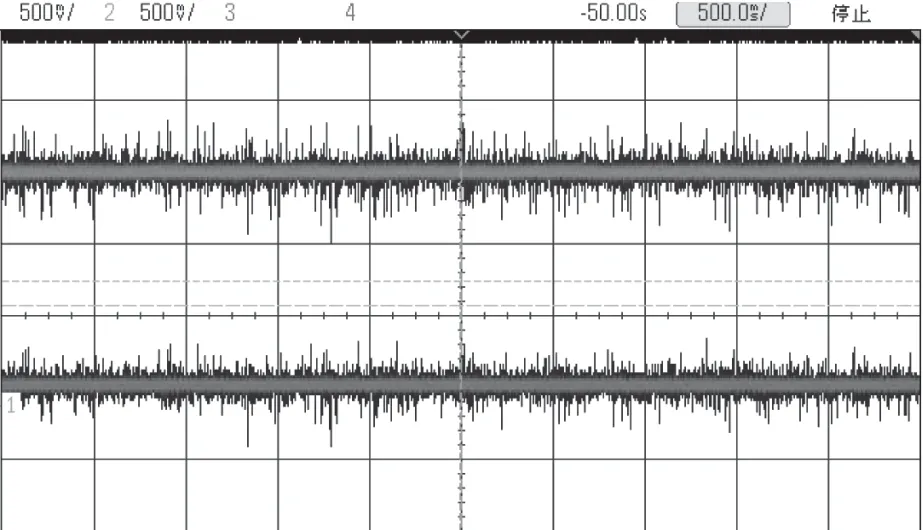
图12 改进型PID算法的动态位移信号波形
4 结束语
本文深入研究了改进型PID算法控制的工作原理以及对磁悬浮轴承性能的影响,提出了该算法的应用方法,并将改进型PID控制策略应用到磁悬浮压缩机的轴承控制系统中,通过与常规PID控制算法进行对比分析,可以得出采用改进型PID控制算法可以加快控制的响应速度,大幅度降低位移超调量,提高旋转时的动态悬浮精度的结论。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
一重技术(2021年5期)2022-01-18
小学科学(学生版)(2021年4期)2021-07-23
建材发展导向(2019年10期)2019-08-24
测控技术(2018年4期)2018-11-25
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
课程教育研究(2017年25期)2017-08-02
饮食科学(2016年3期)2016-07-04
电机与控制应用(2015年2期)2015-03-01
