基于三维激光扫描技术的跨座式单轨桥梁挠度变形监测方法研究
2024-03-31 17:05云宝真李寒冰马永征韩梦玥
交通科技与管理 2024年3期
云宝真 李寒冰 马永征 韩梦玥


摘要 跨座式单轨是城市轨道交通的一种典型制式,其轨道梁挠度是桥梁变形情况和安全性评价的一项重要指标。针对传统监测方法在跨座式单轨高架桥梁监测中难度大且仅能获取有限离散监测点变形信息的问题,文章在某市跨座式单轨中利用三维激光进行轨道梁挠度监测,結果表明该方法与全站仪监测结果对比平均误差为0.16 mm,能够高精度、高效率地得到轨道梁的几何信息,在跨座式单轨桥梁结构监测中具有良好的适用性,对于三维激光扫描技术在变形监测领域中的深度推广应用具有重要的借鉴意义。
关键词 跨座式单轨;桥梁挠度监测;三维激光扫描;点云
中图分类号 U446文献标识码 A文章编号 2096-8949(2024)03-0001-04
收稿日期:2023-12-06
作者简介:云宝真(1979—),男,大专,工程师,研究方向:轨道交通运营维保。
通信作者:李寒冰(1980—),男,本科,高级工程师,从事交通工程测绘信息化发展等方面的研究工作。
0 引言
城市轨道交通已经成为我国城市公共交通的主干线,跨座式单轨作为轨道交通的一种制式,在不断完善的基础上已得到长足的发展。国内已建成或在建的单轨城市有重庆、银川、柳州、芜湖等地。轨道梁挠度监测是跨座式单轨在运营期结构监测的一项重要内容,传统的监测方法主要采用水准仪、全站仪、检测尺等常规设备。由于监测常常只能在轨道停运的夜间进行,并且线路较长、监测任务量大,导致监测的速度和精度受影响。轨道梁一般架设在离地10 m以上的地方,两侧存在供电接触网,导致常规监测方法在全面性、人员安全性等方面也存在不足。随着科学技术的快速发展,GNSS技术、测量机器人、激光干涉法、挠度仪等方法被应用于桥梁挠度监测中[1]。GNSS技术自动化程度高,但是需要在每跨轨道梁布置相应监测设备,成本昂贵。测量机器人可快速自动化监测,但监测周期较长。激光干涉法和挠度仪无法实时同步监测[1]。
三维激光扫描技术可以采用高效快速、非接触的形式获取结构对象的高精度三维坐标,克服了传统测量技术局限性,能大幅节约时间与成本,目前在城市轨道交通设施结构的测量与监测中有较多应用。赵立都等[1]提出了一种基于点云数据的桥梁挠度变形分析方法。万冠军等[2]利用三维激光扫描技术对南宁地铁1号线某区间隧道断面进行测量,验证了三维激光扫描技术在地铁隧道断面测量中应用的可行性和可靠性。刘云峰等[3]设计并提出了一种基于移动三维激光扫描技术的高效地铁限界测量分析方案。赵丽凤等[4]将移动三维激光测量技术应用于地铁隧道结构监测,研发了一套高效快速获取地下空间结构三维几何特征的方法。
综上所述,三维激光扫描技术目前在轨道交通领域多用于隧道内结构变形监测,在桥梁挠度监测中应用研究尚不多见。鉴于此,该文结合某市跨座式单轨结构特点和监测需求,利用地面三维激光扫描进行轨道梁挠度监测,通过对全线轨道点云数据的采集、处理与分析,快速得到轨道梁的几何信息。
1 三维激光扫描监测
1.1 监测对象
该文以某市跨座式单轨为监测对象,该线轨道梁挠度监测工作量大,若大范围布设自动化监测点成本昂贵,且传统人工监测方法在高架轨道梁挠度监测中受限。因此,对于该条线路采用三维激光扫描的方法进行挠度的监测,快速获取高精度、高密度的轨道梁三维点云数据,节省人力物力,提高工作效率。
1.2 点云数据获取
1.2.1 扫描设备
在该次监测中采用的是由美国FARO Technologies Inc.公司生产的 FARO Focus S 350三维激光扫描装置。FARO Focus S 350拥有较小的尺寸、超轻的重量和更远的扫描距离,专门设计用于户外应用,该扫描仪可以通过距离、双轴补偿和角度测量获取更高精度的扫描数据,具体参数如表1所示。
1.2.2 扫描数据采集
对于测量而言,桥梁静态荷载是一个动态过程,不能采用多站拼接的方式测量整个桥体,只能每站单独测量。同时,需在天气状况良好的情况下,采用FARO地面三维激光扫描仪对轨道梁进行扫描测量,仪器架设在轨道梁侧下方中部,视线与梁底面夹角宜大于45 °,设置仪器参数分辨率1/5、质量3倍,分别对每跨轨道梁单独扫描采集数据,每份扫描数据和桥梁段号一一对应,扫描现场如图1所示。
为了方便后续轨道梁挠度的计算以及变形表达,轨道梁坐标系设置如图2所示,以桥墩与桥面交点为坐标原点O、以桥轴线为X轴方向、以天顶方向作为Z轴方向、Y轴由右手法则确定。扫描时人工获取特征点,并将扫描仪坐标系转换到轨道梁坐标系中。
2 点云数据处理和分析
2.1 点云数据处理
扫描获取的点云数据,该文采用FARO SCENE 后处理软件进行处理分析。三维激光扫描技术采集的点云数据量巨大,由于测量过程中车辆行人往来、树木草丛遮挡以及仪器震荡,扫描获得的点云数据存在大量噪声点,扫描获取的某轨道区间的原始点云数据如图3所示,原始点云数据中包含了扫描范围内的所有地物。
在预处理阶段需要对点云数据进行滤波和删减,降低原始数据中的噪声干扰,方便后续进行有效的曲面重建以及量化分析,经过预处理后,有效提取的轨道梁点云数据如图4所示。
2.2 变形量提取
每跨轨道梁作为一个整体,其挠度的变化可以根据梁底面具体数据求得。该文选取轨道梁底面的扫描点云数据,通过计算各梁在不同时刻的坐标变化来确定挠度。
为了得到轨道梁挠度,需要计算每跨轨道梁在垂直方向的形变。该文根据轨道梁结构特征和点云特征,采用基于RANSAC算法与最小二乘拟合的挠度计算方法[5]。如图5所示,为某一跨轨道梁底部点云数据。
轨道梁的扫描点云是一个窄带状条纹,为了消除其中的杂点,需要将其拟合成为一条空间直线。该文利用RANSAC算法过滤掉杂点,再通过最小二乘的方法将处理后的每跨轨道梁扫描数据都拟合成一条空间直线方程[5]:
式中,m、n、p——空间直线的方向分量;x0、y0、z0——空间直线经过的某一点,一般是参与拟合点的重心。
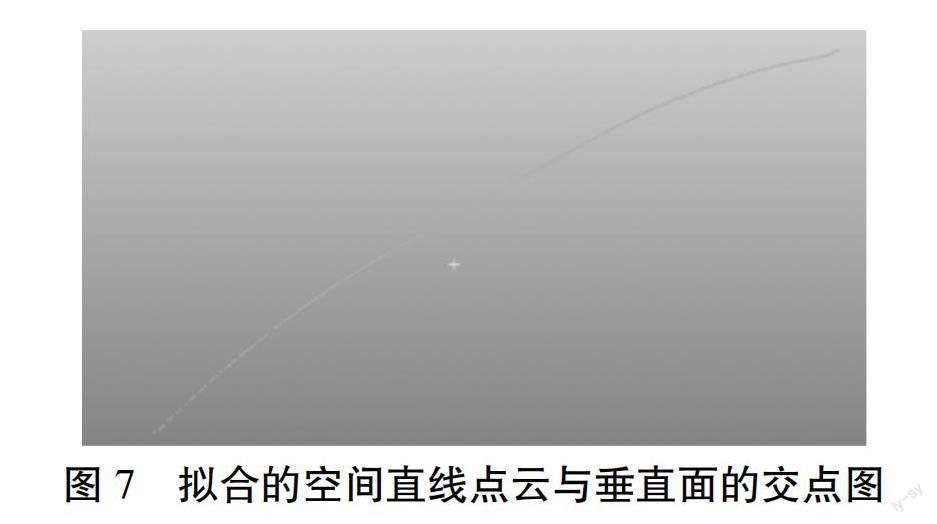
为了获得桥轴线的挠度,先确定一个经过桥轴线且垂直于桥面的平面(如图6所示),该平面与拟合得到的轨道梁底部空间直线的交点,即为桥面挠度的变化点,该平面与拟合直线的交点的z轴坐标即为底面的高程。
若已知平面为Y=ym,则代入式(1)可以得到拟合直线与该平面的交点坐标[5]:
如图7所示,为RANAC算法和最小二乘方法拟合得到的空间直线点云与垂直面的交点。
连接所有交点即可得出桥梁挠度曲线,在此基础上通过两期轨道梁三维激光扫描数据即可求出该段轨道梁挠度变形值。如图8所示,为连接交点得到的某一跨轨道梁挠度曲线。
2.3 轨道梁挠度变形分析
某一期三维激光扫描得到的桥梁底面挠度变形曲线如图9所示。
图9中挠度监测时间为2022年12月。为了监测桥梁挠度的变化,将两期三维激光扫描监测数据进行对比,两期点云数据轨道梁底面挠度曲线如图10所示。
三个月内,轨道梁挠度变形量如图11所示。
由图11可知,两次监测时间内该轨道梁撓度变形量不大,最大值发生在轨道梁跨中,为?0.58 mm,最小值为?0.001 mm。
利用全站仪测量得到的同一区间中的6跨轨道梁左线挠度变形值与三维激光扫描得到的挠度变形值对比结果如表2所示。
由表2可知,两种方法得到的挠度变形值最大误差为0.28 mm,最小误差为0.03 mm,平均误差为0.16 mm。可见三维激光扫描技术在轨道梁挠度变形监测中具有一定可靠性。
相比全站仪、水准仪等传统式测量方法,三维激光扫描技术不再是单点式接触式测量,可快速获取轨道梁海量监测数据,大幅提升轨道梁挠度监测效率,并且充足的监测数据可以为桥梁的安全状态分析提供科学依据。
3 结语
该文在跨座式单轨中利用了三维激光扫描技术进行轨道梁挠度监测,该方法监测结果与全站仪测量结果平均误差为0.16 mm,三维激光扫描技术在满足监测精度要求情况下,能够提高监测效率、增强安全保障,符合我国日益增加的轨道交通设施结构监测需求。
三维激光扫描技术可以在不接触目标地物的条件下,直接采集物体表面的三维数据,该技术在隧道收敛监测、界限检测、裂缝渗水病害检测、建筑物外立面测量等场景中同样具有很好的适用性。
参考文献
[1]赵立都, 向中富, 周银, 等. 利用地面三维激光扫描进行桥梁挠度变形分析[J]. 测绘通报, 2022(5): 95-100.
[2]万冠军, 马全明, 丁林磊. 三维激光扫描技术在地铁隧道断面测量中的应用[J]. 都市快轨交通, 2017(4): 60-64.
[3]刘云峰, 董燕, 柳志云. 基于移动三维激光扫描仪的地铁限界测量分析[J]. 软件, 2019(2): 116-120.
[4]赵丽凤, 唐超, 侯海倩. 轨道交通隧道全断面病害智能诊断与服役状态评价[J]. 测绘通报, 2020(9): 1-6+17.
[5]徐进军, 郭鑫伟, 廖骅, 等. 基于地面三维激光扫描的桥梁挠度变形测量[J]. 大地测量与地球动力学, 2017(6): 609-613.
猜你喜欢
计算机应用研究(2023年10期)2023-10-17
计测技术(2020年6期)2020-06-09
智能计算机与应用(2017年3期)2017-07-15
农家科技中旬版(2017年5期)2017-07-14
中国科技纵横(2017年3期)2017-03-29
软件导刊(2016年12期)2017-01-21
科技视界(2016年4期)2016-02-22
绿色科技(2015年6期)2015-08-05