
基于嵌入式技术的轻小型落地抱杆自动控制系统研究
2024-03-30 09:51张亦大徐强
自动化与仪表 2024年3期
邹 麒,张亦大,徐强
(国网江苏省电力有限公司宿迁供电分公司,宿迁 223800)
输电线路是电力企业提供电能供应的重要基础设施[1],国民经济的蓬勃、高速发展,使得社会对电能需求量不断扩大,这对架空输电线路建设起到极大推动作用。特高压输电线路具有输电能力强、输送距离远、土地占用低、线路损耗低等特点[2],因此,在远程、高容量电力输送方面具有较高的应用性。在特高压输电线路双回路铁塔组立施工现场,普遍使用起重塔机等大型起重吊装设备或内悬浮外拉线加人字抱杆等,前者虽具备较高的机械化水平以及稳定性[3],但由于特高压输电线路双回路铁塔组立施工环境恶劣,增加了设备的搬运难度的同时,降低了施工作业效率;后者虽解决了运输难度高的问题,但该抱杆起升风险较大,且其可承受的起吊重量难以满足特高压输电线路双回路铁塔组立要求[4-6]。利用嵌入式技术设计具有高智能性与集成性的轻小型落地抱杆对降低特高压铁塔组立施工难度具有重要意义[7]。轻小型落地抱杆的运行状态直接影响特高压组塔施工效果,为提高其作业性能,降低故障发生率,不可避免要对其进行自动化控制[8-10]。
本文研究基于嵌入式技术的轻小型落地抱杆自动控制系统,通过对起升、回转、变幅动作调频速度以及吊钩负载转矩补偿的精准控制,提高特高压组塔施工效果。
1 轻小型落地抱杆自动控制系统
1.1 轻小型落地抱杆结构原理
本文研究的轻小型落地抱杆为双动臂塔基式抱杆,其结构中含有塔顶,利用软拉索或拉杆将其与吊臂相连,轻小型落地抱杆结构如图1 所示。吊臂起吊重物时,塔顶主弦杆在荷载作用下会发生不同程度的形变,对其变形程度进行测量即可实现吊装弯矩的确定。将力矩限制器安装在塔顶主弦杆上,便可得到左、右吊臂起吊重物后的力矩测量值。轻小型落地抱杆在运行过程中,因吊装、卸载与变幅动作难以满足同时、同步性,将造成轻小型落地抱杆左右吊臂力矩的不平衡,左右吊臂的不平衡力矩之差高于给定阈值后,则驱动轻小型落地抱杆控制系统进行主副钩负载转矩补偿控制。
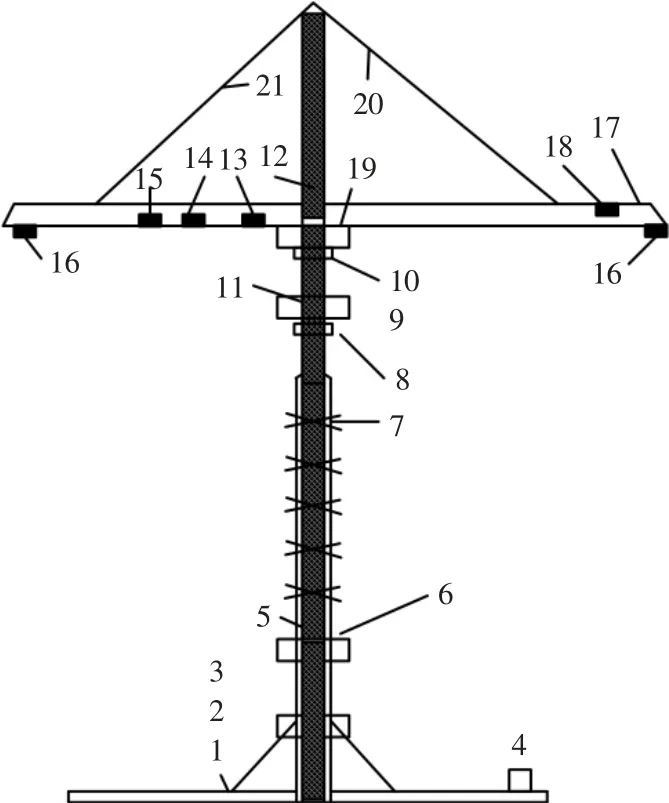
图1 轻小型落地抱杆基本结构图Fig.1 Basic structure of light and small landing pole
1.2 嵌入式主控制器设计
嵌入式主控制器中包含4 块电路板,其中主控板是其核心部分,具有信息处理、下达指令、协调其他电路板等关键硬件和软件功能,母板是支撑和连接所有电路板的组件,脉冲宽度调制板负责生成和控制脉冲宽度调制信号,选件板提供传感器接口等辅助功能。各电路板之间通过并行总线实现信息的交互,有利于数据传输效率的有效提升。嵌入式主控制器不仅具有较低的空间占用率与突出的板卡集成性能,还包含丰富的数据接入端口,以满足轻小型落地抱杆控制要求[11]。嵌入式主控制器结构如图2 所示。
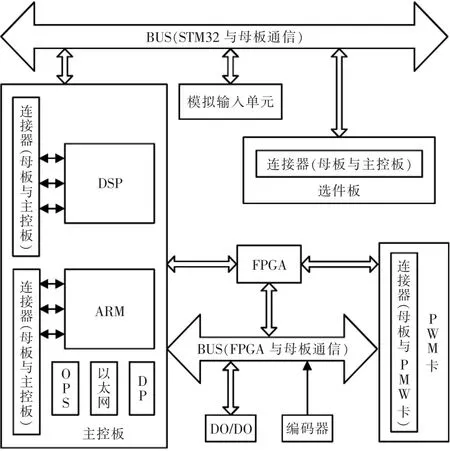
图2 嵌入式主控制器结构图Fig.2 Embedded master controller structure diagram
1.3 轻小型落地抱杆变频调速控制流程
轻小型落地抱杆的起升、回转、变幅动作都可实现变频调速控制,以满足特高压输电铁塔组立施工过程对吊装速度的要求,同时确保空钩以理想速度升降。轻小型落地抱杆变频调速控制流程如图3所示。轻小型落地抱杆控制系统开启时,利用LCD界面对其启动状态进行可视化呈现,并以振铃方式提示工作人员轻小型落地抱杆已准备就绪,首先对轻小型落地抱杆的运行状态参数进行监测,判断其是否处于正常状态,当存在异常时,发出预警信息并解决其异常问题,当轻小型落地抱杆正常启动后,对起升机构的起升速度以及吊装物的重量进行检测,将吊装重量作为速度控制依据,按照轻小型落地抱杆程序流程并利用以太网将远程控制中心的控制指令传输给嵌入式主控制器。

图3 轻小型落地抱杆变频调速控制流程Fig.3 Frequency conversion speed control flow chart of light and small landing pole
1.4 基于嵌入式技术的轻小型落地抱杆自动控制系统框架
基于嵌入式技术的轻小型落地抱杆自动控制系统框架如图4 所示。

图4 嵌入式的轻小型落地抱杆自动控制框架Fig.4 Embedded light and small automatic control frame of the landing pole
(1)基础数据单元。该单元利用不同类型传感器实现轻小型落地抱杆运行数据的采集。
(2)控制单元。利用CAN 总线与轻小型落地抱杆各工作机构变频器等建立数据传输通信,实现控制信息的交互与共享。当嵌入式主控制器接收到来自控制盒的动作申请信息后,依据已规划好的控制策略,采取逻辑与计算方式将其发送给各变频器、电机及制动器,控制吊钩以及各小车完成升降、行车等动作。
(3)通信单元。作为控制单元与远程控制中心的连接纽带,利用以太网实现控制信息的通信与交互。
1.5 基于参数自适应模糊PID 的吊钩负载转矩补偿控制
1.5.1 模糊PID 控制器设计
模糊PID 是一种非线性控制算法,它不是直接以误差和误差变化率作为输入,而是利用模糊规则进行模糊推理,通过查询模糊矩阵表完成参数的调整,具有稳定度高、鲁棒性好的优势。因此,本文提出基于模糊PID 的吊钩负载转矩补偿控制方法,以避免不平衡转矩问题引发的轻小型落地抱杆故障问题。图5 所示为模糊PID 控制器原理图。
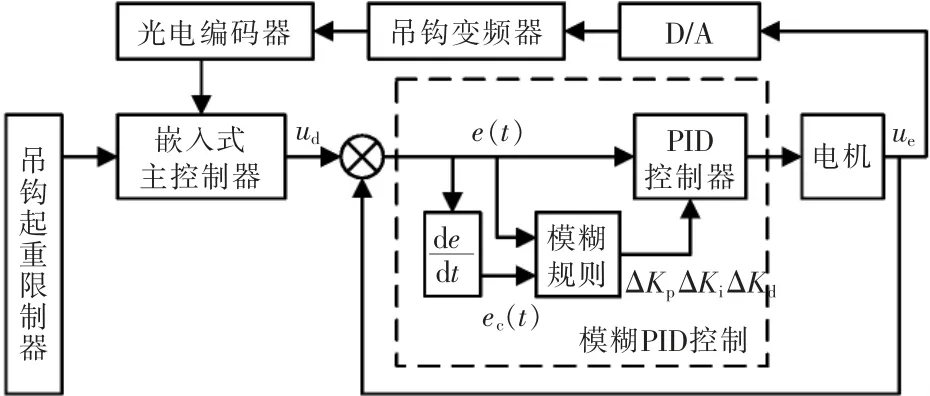
图5 模糊PID 控制器原理图Fig.5 Principle diagram of fuzzy PID controller
1.5.2 基于粒子群算法的模糊PID 控制
粒子群算法(PSO)是一种智能优化算法,算法思想源于鸟群捕食行为[12]。在PSO 中,每个个体的移动方向与距离取决于其位置与运行速度,在反复迭代过程中实现最优个体的搜索。本文采用粒子群算法对模糊PID 控制参数Kp、Ki、Kd进行优化,以提高轻小型落地抱杆控制系统的控制精度。基于PSO的模糊PID 控制参数优化流程如图6 所示。

图6 基于PSO 的模糊PID 控制参数优化流程Fig.6 Flow chart of fuzzy PID control parameter optimization based on PSO
2 实验结果与分析
以应用于某特高压组塔施工中的轻小型落地抱杆为实验对象,在下述实验环境中进行本文系统的搭建。操作系统为Windows10.0,采用八核CPU 处理器,工作频率为4.2 GHz,内存64 GB。将本文系统应用于该轻小型落地抱杆的自动化控制中,对其起吊重量、高度、转矩等实时运行状态数据进行采集,数据采集周期为10 s,通过对其进行分析,验证本文系统的控制效果。
控制参数对轻小型落地抱杆吊钩负载转矩补偿控制效果具有直接影响,通过对比分析控制参数优化后的平均适应度曲线与最优适应度曲线的差异,实验结果如图7 所示。分析图7 可知,对模糊PID 控制器参数进行在线优化整定后,随着进化次数的不断增大,平均适应度值呈逐渐减小规律变化,平均适应度曲线走势平缓,波动起伏小,经过50次进化后,适应度值降至最低,最终稳定在1.0。平均适应度曲线与最优适应度曲线基本保持相同的走势规律,二者贴合度极高。实验结果表明,模糊PID 控制器控制参数优化效果突出,有利于轻小型落地抱杆吊钩负载转矩补偿控制效果的提升。
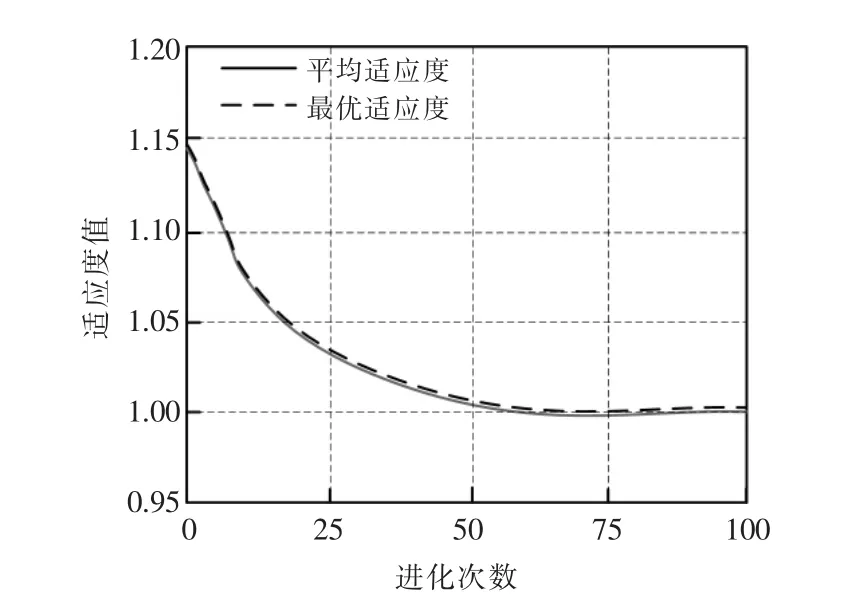
图7 控制参数优化效果分析Fig.7 Analysis of optimization effect of control parameters
应用本文系统对2 种工况下的轻小型落地抱杆进行负载转矩补偿控制,并与传统PID 控制结果进行对比,通过对信号的阶跃响应曲线进行分析,研究本文系统的控制效果,实验结果如图8 所示。分析图8 可知,采用传统PID 控制算法对轻小型落地抱杆进行吊钩负载转矩补偿控制,在转动力矩为75%的工况下,信号阶跃响应曲线在控制初期表现出剧烈波动,曲线平滑度低,75 s 后曲线逐渐开始趋于稳定;转动力矩为50%工况下的控制效果优于75%工况,60 s 后曲线呈现平稳走势规律,曲线波动幅度减缓。本文系统采用参数自适应模糊PID 控制器对50%、75% 2 种工况吊钩负载转矩进行补偿,取得了突出的控制效果,信号阶跃响应曲线走势更平稳,抖动更小,控制时间分别为10 s、35 s,超调量更小。
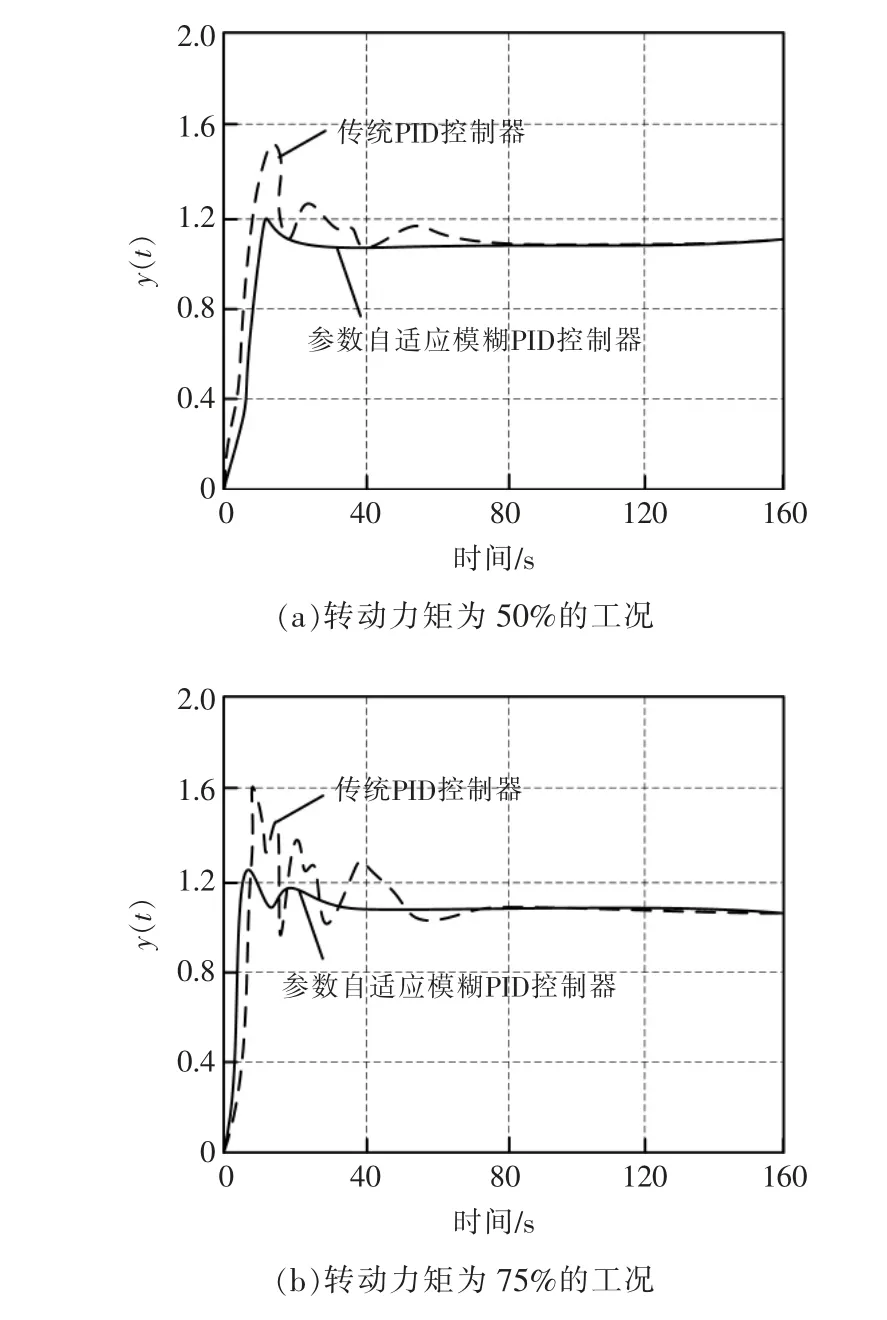
图8 信号阶跃响应结果对比Fig.8 Comparison of signal step response results
转动力矩为50%工况下,应用本文系统对轻小型落地抱杆进行自动化控制,通过对比分析控制前后模拟电压输出波形差异,验证本文系统的控制效果,实验结果如图9 所示。分析图9 可知,转动力矩为50%工况下,模糊PID 控制前的轻小型落地抱杆变频器模拟电压输出波形呈现出较高的波动性,曲线不平滑,特别是波峰波谷位置处波动的剧烈程度较高;完成抱杆吊钩负载转矩补偿控制后,输出的模拟电压曲线走势稳定、平滑度高,力矩不足引起的振荡问题得到有效控制。实验结果表明,本文系统可实现轻小型落地抱杆吊钩负载转矩补偿控制,控制效果突出。
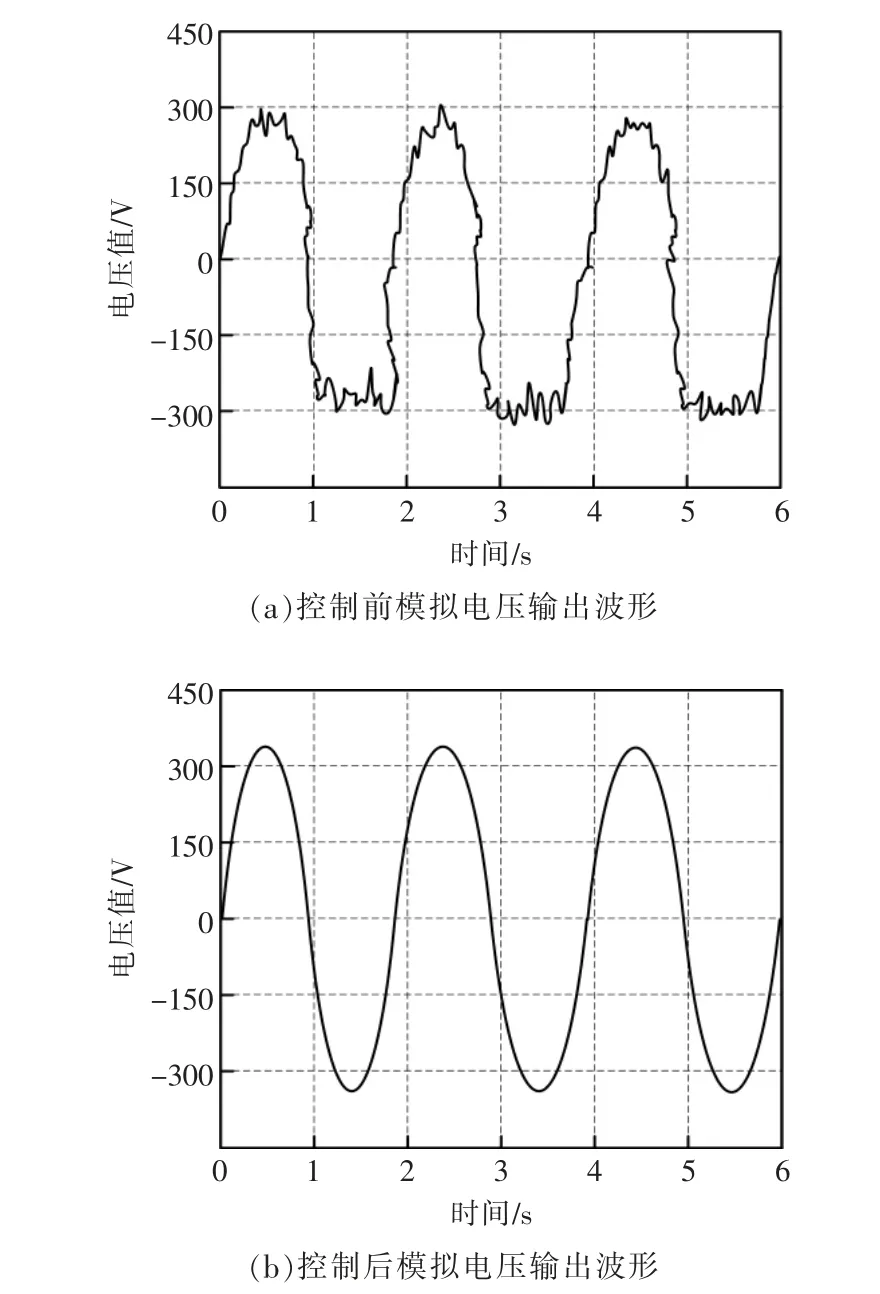
图9 控制前后模拟电压输出波形差异对比Fig.9 Comparison of analog voltage output waveform difference before and after control
轻小型落地抱杆是特高压组塔施工中的重要设备,本文选取多个施工指标用于特高压组塔施工效果衡量,实践证明,通过对轻小型落地抱杆进行自动化控制,在实现特高压输电线路铁塔组立的同时,也能提高特高压组塔施工效率,降低施工难度、施工风险以及成本,另外,也放宽了对操作人员的技能要求,本文系统具有实际应用性,并可取得突出的施工效果。
3 结语
研究基于嵌入式技术的轻小型落地抱杆自动化控制系统,通过对比分析吊钩负载转矩补偿控制结果、控制参数优化结果等,验证本文系统的实际应用性,实验结果表明,该系统可实现轻小型落地抱杆自动化控制,控制后的阶跃响应曲线平滑、控制时间短、超调量小;输出的模拟电压波形走势平稳,不存在振荡问题;特高压组塔施工效果突出。
猜你喜欢
华人时刊(2023年11期)2023-07-29
飞控与探测(2022年6期)2022-03-20
力学学报(2020年4期)2020-08-11
山西冶金(2020年3期)2020-07-15
山西冶金(2017年6期)2018-01-17
黑龙江电力(2017年1期)2017-05-17
通信电源技术(2016年3期)2016-03-26
铸造设备与工艺(2015年3期)2015-07-11
现代企业(2015年6期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年2期)2014-11-12
