
基于车辆运行状态的高速公路交通安全管控技术研究
2024-03-28 08:01李洋洋耿昭师
交通工程 2024年3期
熊 丹, 李洋洋, 耿昭师
(1.广东省路桥建设发展有限公司, 广州 510623; 2.北京中交华安科技有限公司, 北京 100088)
0 引言
随着交通强国战略的不断深入,我国交通基础设施建设投资不断加大,高速公路通车里程也逐渐增长,截至2022年底,全国公路通车里程535万km,其中高速公路通车里程已达到17.70万km,道路形成大量的长下坡、弯道、桥隧等危险路段. 同时伴随着全球气候多变趋势加重,国内浓雾、大风、雨雪等恶劣气候频发且持续时长增加,道路行车环境变得异常严峻[1],引发大量交通事故发生.
针对此,诸多学者已对高速公路行车安全问题进行研究. 杨洋等[2]对高速公路交通事故方面研究成果及新技术手段应用进行全面总结,分析了交通事故发生机理、各模型特性特点等;杨洋等[3]通过对华盛顿州3万余条交通事故数据的分析,提出了改进的WODMI-Apriori算法更好地揭示高速公路的事故致因、更精确地识别事故风险因子;张宝[4]通过对高速公路交通事故数据的分析,提出了事故预防对策和管控措施;甘元震[5]通过分析交通事故发生前的车辆运行状态,建立车辆异常行驶状态模型,进而提出车辆异常行驶预警方法;朱宪飞[6]基于车辆视频数据提出1种通过卷积神经网络学习,建立车辆行为识别模型的方法,实现对车辆异常行为的有效识别;杨洋等[7]通过分析不同尺度数据集对高速公路实时事故风险建模的影响,实现不同数据特征路段间事故风险模型的空间移植,论证了高样本量路段的模型可获得更高的分类准确性和预测精度. 同时,伴随着信息技术、机器视觉、传感器技术的迅速崛起,智能预警、管控技术在高速公路安全管理上得到大量应用,谢瑞等[8]设计研发了用于山区公路弯道盲区交通情报预警系统,其主要在弯道入弯和出弯两侧安装“一体式LED警示屏”,在弯道安装了LED频闪转弯标志和弯道诱导标志;蔡创新等[9]提出了车路视觉协同的高速公路防碰撞预警算法,通过行车记录仪对环境进行感知,结合路面车道线、行车速度和前车位置信息,实现防碰撞预警;Tian等[10]提出了1种基于云计算的高速公路交通安全预警系统,该系统通过BP神经网络算法对道路节点进行分类,然后根据道路状态信息生成安全警告(4个等级),解决了数据生成过多的问题,具有实时、动态、高效、准确的特点.
综上,受道路车辆种类多、智能化水平差异大、行车环境多变等因素影响,车辆行车安全问题仍十分严峻. 本文在现有研究成果的基础上,本着“事前预防”理念,提出基于车辆运行状态的交通安全估测模型,对车辆运行状态进行判断和识别,并构建基于车辆运行状态的预警管控系统,通过声光警示信息对异常车辆进行预警警示,从而降低交通事故发生率.
1 公路交通安全分析
高速公路交通事故的发生主要是驾驶员操作车辆与当前行驶环境不符所致,产生这一原因有人为因素和环境因素,其中环境因素如浓雾、雨雪等,会使得驾驶员视线受阻、道路摩擦系数降低、操作稳定性差、驾驶员心理负荷增大,而人为因素如驾驶疲劳、注意力分散等,会使得驾驶车辆偏离预定行驶路线、车辆操作失控等. 从车辆运行状态上看,二者因素影响均会引起车辆运行状态出现加减速度波动变化过大、车辆行驶路线偏离如压线或跨线、车辆超速行驶、跟车时距较小、车辆运行速度与当前能见度不符等诸多非正常驾驶状态的现象,尤其是面对突变的天气环境如高速公路突发团雾、降雨等情况,驾驶员无法对突变的行驶环境作出准确及时的反应致使车辆出现事故. 同时根据各地交管部门反馈,一般车辆事故形态主要是:碰撞安全设施事故、前后车辆追尾事故,情况严重者出现冲出高速公路或侧翻等事故. 目前,通过外部手段解决交通事故发生的人为和环境两大因素是降低高速公路交通事故发生的有效途径. 基于此,研究探讨通过智能化的道路路侧车辆检测装置对车辆的运行状态进行判定和识别,进而通过声光预警警示装置给予异常车辆驾驶员预警提示,从而降低道路交通事故的发生率.
2 车辆安全估测模型
2.1 车辆运行速度限制
公路行车环境信息主要涵盖2方面内容:一方面是当前路段的道路信息,包含道路线形、坡度、车道宽度、车道数量、地面摩擦系数、最大限速、安全设施等数据信息;另一方面是道路地形、周边环境、气候环境等数据信息. 基于当前道路行车环境信息,本文从影响车辆运行安全的主要致因出发,结合公安部发布的《关于低能见度气象条件下高速公路交通管理的通告》中对低能见度高速公路交通管理规定(如表1所示)要求,融合道路摩擦系数(湿度)、风速等双约束条件,提出适用于当前行车环境的限速控制方法,从而得到不同行车环境下,道路交通安全运行的最大限速值.
(1)

表1 低能见度时国家高速公路交通管理规定
式中,vmax为当前环境(能见度)下道路交通的最大限速值(km/h);vd为当前路段规定限速值(km/h);vi为当前行车环境下能见度i(i=1,2,3,4,5,6)等级对应的限速值(km/h);vch为当前行车环境下车辆不发生侧滑的最大限速值(km/h);Svmin为当前行车环境下车辆跟车的最小距离(m);Di为当前行车环境下能见度i等级对应的最小车距(m);vk为满足车辆不发生侧滑的能见度k等级对应的最大限速值(km/h);vm为满足车辆跟车最小距离的能见度k等级对应的最大限速值(km/h);
当前行车环境下车辆不发生侧滑的最大限速值vch约束为:
(2)
式中,m为车辆的质量(kg);g为重力加速度(m/s2);α为道路的超高(%);R为道路的曲率半径(m);μh为道路横向摩擦系数;Cs为气动升力系数;Cc为侧向气动力系数;ρ为气流空气密度(kg/m3);A为汽车迎风面投影面积(m2);vw为检测横风风速(m/s2).
当前行车环境下车辆跟车的最小距离Svmin约束为:

(3)
式中,S1为驾驶员反应距离(m);S2为车辆制动距离(m);S3为车辆安全停车距离(m);v0为驾驶员发现前方障碍物或前导车时车辆的行驶速度(km/h);t1为反应持续时长(s);vf为驾驶员发现前方障碍物或前导车时的行驶速度(km/h);bm为驾驶员驾驶车辆的减速度(m/s2).
2.2 车辆运行状态指标
基于车辆状态信息,获取与当前车辆行驶环境相适应的车辆安全运行状态信息,进而以此状态信息为基准,对当前路段过往车辆的运行状态进行判别,获取当前状态下运行状态异常的车辆. 根据《道路交通安全法》等规定要求,车辆行驶与道路上主要运行行为有沿着道路正常行驶(含加减速)、正常换道行驶等操作,而通过对道路事故致因或事故车辆运行状态的分析,本文选取车辆运行速度、车道偏移、前后车头间距为判别指标对车辆的运行状态安全性进行估测判定.
1)车辆运行速度指标:
(4)
式中,αi为车辆i的超速百分比;vi为车辆i的实际运行速度(km/h);vsi为车辆i在当前行车环境下的限速值(km/h).
2)前后车头间距指标:
(5)
式中,βi为车辆i的超间距百分比;Ds为当前环境下车辆的允许最小间距(m);Di为车辆i与前车保持的实际间距(m),其中Di=viΔt;vti为车辆i的驶过检测区的运行速度(km/h);Δt为前车驶过检测区与车辆i的驶过检测区的时间差(s).
3)车道偏移指标:
(6)
式中,δi为车辆i偏离车道距离百分比;b为布尔值,1表示车辆i转向灯亮,0表示转灯不亮;di为车辆i偏离车道中心线的距离(m);dl为车辆i所在车道的宽度(m);dci为车辆i的车身宽度(m),车辆的车型不同则其车身宽度也不同.
4)车辆运行安全性估测:
Si=(A1αi+A2βi+A3δi)t
(7)
式中,Si为车辆i的综合安全性指标;Ai(i=1,2,3)为指标系数,通过对大量车辆异常数据、事故数据进行统计分析,确定各指标系数;t为车辆异常行驶持续时长/s.
2.3 车辆运行状态判定
本文以车辆安全性行驶状态为基本依据,充分考虑车辆异常行为的冗余性特点,从车辆单指标异常和车辆运行安全性指标2方面入手,对其状态进行判定.
1)单指标车辆异常判定
(8)
式中,Yi为车辆预警警示信息,其中1,2,3,4分别为“前方事故多发,请谨慎驾驶”“车辆i(XXX车牌号)已超速,请减速”“车辆i(XXX车牌号)注意保持跟车距离”“车辆i(XXX车牌号)注意前后来车,谨慎驾驶”;τi(i=α,β,δ)分别为指标阈值约束,依据管控路段实际情况决定.
2)车辆运行安全性异常判定
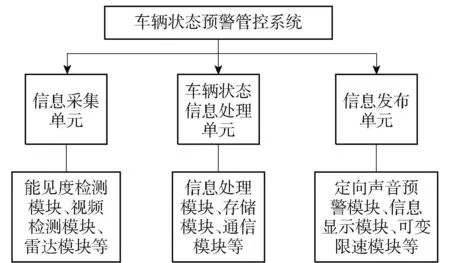
首先,设定车辆运行状态安全性阈值为Sγ;其次,对过往车辆的运行安全性数据进行存储和获取,提取当前时刻车辆i前t时间内所有车辆运行状态安全性的估测值(s),判别Sγ≥Si的数据为m辆,Sγ (9) 式中,T为当前t时间段内道路交通的安全性,其中0为当前时段道路交通运行安全,执行单指标管控策略,1为当前时段道路交通运行危险,重新优化路段管控限速值;q为路段交通运行安全容忍度,由道路交通事故率决定. 本文以广东某双向6车道高速公路山区路段为例,路段设计限速100 km/h,单车道宽度3.75 m. 根据环境检测信息,路段最大运营限速为100 km/h,以高速公路监控路段上下行临近路段相邻卡口检测数据和系统检测环境数据为基础,选定85%为车辆超速百分比为限定阈值为10%;以检测路段车辆运行车速为依据,该路段车辆间距阈值为50%;以检测路段车型构成比例和事故案例为依据,该路段车辆偏移阈值为20%. 同时,车辆运行安全性指标系数Ai(i=1,2,3)均设定为1,暂未考虑各指标权重系数差异. 通过获取该路段15 min系统识别数据结果和现场对应的视频监控视频,对系统识别准确性进行分析:根据视频数据,时间段内共计运行车辆234辆,其中大车60辆,通过视频识别和人员现场观测,累计发现异常车辆25辆,其中超速车辆12辆、车头时距不足8辆、车道偏移异常5辆. 而模型识别系统累计识别过往车辆215辆,其中大车58辆,系统累计发现异常车辆22辆(含4辆错误),其中超速车辆10辆(含2辆错误),车头时距不足6辆,车道偏移4辆(含2辆错误). 综上,本系统识别的准确率为72%,识别错误率为18%. 当然,系统模型识别的准确率和错误率除与系统检测装置安装位置和性能有关外,还有系统模型参数的设定息息相关. 本文车辆行驶预警目的是实现车辆前方道路信息预先获知、告知驾驶员行车注意事项、车辆异常行驶行为预警监管,主要从2个方面提升高速公路交通运行的安全性. 一方面是依托本文估测结论对当前事故多发路段进行可变限速控制,使得当前车辆行驶环境与其行驶限速相匹配;另一方面是基于车辆运行状态识别对异常行驶的车辆通过声光警示途径发布警示信息. 图1 预警管控系统结构 预警管控系统操作如下: 1)预警显示初始化设置. 本文预警系统起始阶段进行初始化设置,依据基于车辆运行状态的安全性预估模型中对异常车辆状态指标的判别结果,根据本文车辆运行状态情况,对预警信息内容进行初步设定,即“事故多发路段注意行车安全、危险路段注意保持车距、危险路段严禁换道行驶、危险路段严禁超速行驶、危险路段请注意保持车速”5种状态,可通过电子信息显示、定向语音提示等方式告知道路行驶车辆. 2)检测路段数据库构建. 通过对已经过车辆的数据信息的识别,对其异常车辆识别信息或数据按照分日期、分时间段进行存储,并按照数据共享与访问机制,通过人工介入方式对识别过程中不确定的异常信息进行二次确认,将异常数据信息进行剔除,实现对存储数据的净化处理. 同时,根据项目历史识别数据,实现本路段异常车辆判定指标参数的设置. 3)车辆运行路段前置预警提示. 根据已设定的预警信息时间迭代阈值,通过对检测数据库中的异常车辆数据进行统计分析,确定此阈值范围内各状态指标及安全性指标辨识异常车辆的数量,分别记为n1,n2,n3,n4,n5,其预警信息分别对应初步设定的“5种状态”信息,则提前预警信息显示为:Max{n1,n2,n3,n4,n5}对应的预警信息. 4)异常车辆定向预警提示. 基于高速公路全路段视频监控设施,融合本文预警装置信息检测、预警等模块,对路段车辆实现异常车辆识别、预警、上报等工作. 首先,通过本文上述模型,结合本路段异常车辆数据库信息所标定的各指标阈值,对途经本路段的各运行车辆状态进行识别和运行安全性预估,进而根据车辆异常判定的主要因素,通过定向语音、预警信息显示等方式进行异常的车辆预警警示,并将该信息上传至管控中心,实现对该车辆的重点监控,同时根据其违规情况按照车辆行驶的规范要求进行抓拍和处罚. 针对本文智能预警管控策略,同一时间未出现异常车辆时,预警装置处于其默认状态,声音预警处于关闭或常态化信息提示状态,前置显示模块处于常态化显示工作状态,可根据路段实际特点进行设置;同一时间仅出现1辆异常车辆,预警装置则依据车辆异常的主因素判别结果,对其车辆进行前置信息预警和声光定向预警,其显示为闪烁方式,而对于预警时长和频次的设置上主要是取决于车辆通过检测装置到通过声音预警装置所需要的时长,一般为1.2 s;同一时间出现多辆异常车辆时,则选择车辆危险性较高的两辆异常车辆进行前置信息预警和声光定向预警,其声音预警和频闪警示采用交替进行. 本文提出了基于车辆运行状态的高速公路交通安全估测模型,实现对异常行驶车辆的判定和识别,并基于智能化管控技术构建基于车辆运行状态的预警管控系统,通过声光预警警示对异常车辆预警,从而避免交通事故的发生. 通过案例比对分析:本系统识别准确率可达到72%,识别错误率为18%,实现对绝大部分异常车辆的预警警示. 当然,本文所提模型和系统对异常车辆判定准确性、预警警示途径等方面存在不足,需在未来应用中不断对其进行完善,后期应融合和接入各导航软件及智能车自身检测预警系统,以及车间智能通信技术等,以提升系统的识别准确性、预警的针对性等,从而保障好道路车辆运行的安全性.2.4 车辆运行状态估测分析
3 预警管控系统
4 结论
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
建材发展导向(2019年11期)2019-08-24
今日农业(2019年12期)2019-08-13
现代园艺(2017年22期)2018-01-19
汽车与安全(2016年5期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
