基于LSTM-CAPF框架的岸桥起升减速箱轴承寿命预测方法
2024-03-28 14:39孙志伟孙德建
上海交通大学学报 2024年3期
孙志伟, 胡 雄, 董 凯, 孙德建, 刘 洋
(1. 上海海事大学 物流工程学院,上海 201306; 2. 中国船舶集团有限公司第七一一研究所,上海 201108)
岸桥作为特种设备,是港口集装箱运输领域最常用的大型设备.起升减速箱的健康状况决定了岸桥的工作效率和生产安全.轴承作为起升减速箱的关键部件,在集装箱升降的过程中,将承受周期性的“急启-急停”操作引起的振动冲击.长期来看,它将导致轴承性能退化或突然失效,进而造成停机甚至人员伤亡[1-2].对轴承进行状态监测和寿命预测可以避免不必要的停机,提高岸桥工作的可靠性以及安全性[3-4].
传统关于轴承寿命的研究一般集中在固定工况条件下轴承退化过程与振动、温度和其他类型信号演变之间的关系.这些研究所采用的方法主要分为两大类:基于模型驱动的方法和基于数据驱动的方法[5].模型驱动的方法通过建立物理模型对轴承退化状态与剩余使用寿命(Remaining Useful Life,RUL)进行预测.Lei等[6]基于Paris-Erdogan模型建立了轴承退化模型,并使用粒子滤波算法预测RUL.Qian等[7]结合Paris-Erdogan模型与多维自回归模型预测轴承的缺陷演变.当失效机制过于复杂而难以建模时,数据驱动方法能够通过数据推演退化过程.Aye等[8]使用综合高斯过程回归(GPR)模型预测了滚动轴承的退化趋势.Wang等[9]使用多个深度自动编码器模型提取线性可靠性指标,用于在特定负载和速度条件下进行RUL预测.Ali等[10]利用简化的模糊自适应共振理论映射(SFAM)神经网络作为退化模型,并提出了一个平滑阶段来寻找最佳RUL预测.这两类方法都获得了准确的RUL预测结果.但这些研究均假设轴承的运行工况在其整个寿命周期内保持不变,并未考虑工况的变化对退化过程的影响.但实际工作中轴承的运行工况常根据生产需要而改变,将工况变化的影响排除在退化过程之外是不现实的.工况的变化可能会导致信号幅值等特征产生变化,进而影响RUL预测,因此有必要在进行RUL预测时考虑工况条件变化的影响.
最近一些研究考虑了时变工况对RUL预测的影响.工况变化对退化信号的影响可概括为两部分[11]:① 不同工况下的退化率变化;② 工况切换时的信号跳变.Liao等[12]考虑了在工况分段恒定时,利用贝叶斯框架估计退化率,并通过蒙特卡罗模拟预测RUL.Peng等[13]比较了固定型、单调型和S型退化率的退化过程,并用逆高斯过程预测了RUL.Kundu等[14]将载荷、速度、温度、湿度等工况因素作为退化参数,使用威布尔退化模型预测轴承寿命.Li等[15]将信号跳跃系数与退化率引入到双因素状态空间(F2S2)模型中,并给出了时变工况条件下剩余寿命的分布.这些文献研究了轴承在动态运行条件下的RUL预测,但都假设同一轴承的未来运行工况是预先确定且分段恒定的.岸桥生产作业中运行工况会动态变化,并且在系统退化期间无法预先确定.因此,有必要在预测退化状态之前先预测载荷,并确定相应的运行工况.
为研究时变工况对RUL预测的影响,本文在寿命预测之前增加了载荷预测和工况分类步骤,并针对工况切换问题,解决了预测过程中模型参数随工况变化的更新方法.具体来说,首先,采用等距离散化方法对载荷进行分类,确定不同的运行工况;并利用长短时记忆(Long and Short-Term Memory,LSTM)网络模型对载荷进行预测;然后,考虑退化率和跳变系数,采用改进的维纳过程作为状态转移函数来描述系统状态的退化过程;最后,采用工况激活粒子滤波(CAPF)方法[16]对退化状态进行预测,更新退化率和信号跳变系数,并实现RUL预测.
1 基本理论
1.1 载荷离散化
文献[17-18]中利用离散化方法对工作载荷进行分类.等距离散化方法操作简单,计算速度快[16],因此本文采用该方法对载荷进行离散,并计算工况边界.该方法具体步骤如下.
假设载荷序列为S={S1,S2, …,Sm},分为k种工况,载荷最大值和最小值分别为Smax,Smin.
(1) 计算区间间隔:
(1)
(2) 生成k+1个区间边界点:
Sr= {Sr0,Sr1,Sr2, …Srj, …,Sk-1,Srk}
(2)
式中:Srj+1-Srj=SLC;Sr0=Smin;Srk=Smax;0≤j≤n-1.
(3) 设置t时刻的工况:
pt=j,Srj≤pt (3) it=σ(Wixt+Uiht-1+bi) (4) ft=σ(Wfxt+Ufht-1+bf) (5) ot=σ(Woxt+Uoht-1+bo) (6) (7) (8) ht=ot⊙tanhct (9) 式中:xt为t时刻的输入变量;ct为记忆单元的更新状态;ht为LSTM的最终输出;Wi,Wf,Wo,Wc,Ui,Uf,Uo,Uc为权重矩阵;bi,bf,bo,bc为偏置向量;⊙为两个向量的元素乘积;σ,tanh分别为sigmoid和双曲正切激活函数, (10) (11) 图1给出了 LSTM 网络的循环单元结构,其计算过程如下. 图1 LSTM神经元结构图Fig.1 Structure diagram of LSTM neurons (2) 结合遗忘门ft和输入门it来更新记忆单元. (3) 结合输出门ot,将内部状态的信息传递给外部状态ht. 维纳过程模型[20-21]是常用的轴承退化状态模型.通用的维纳过程模型一般表示为 W(t) =W(0) +ηt+σBB(t) (12) 式中:W(t)表示系统在t时刻的状态;W(0)表示系统的初始状态值,通常设置为0;η为退化率;σB为扩散参数;B(t)是标准布朗运动.基于对时变工况的考虑,建立以下退化方程: y(t)=αpt,pt-1(y(t-Δt) +ηptΔS+ βpt,pt-1) +ωt-1 (13) 式中:y(t) 为t时刻系统状态;αpt,pt-1和βpt,pt-1为由t-1时刻至t时刻工况变化对应的跳变参数;ηpt为t时刻对应工况的退化率,在固定工况下为常数,但会随着工况的变化而变化;ΔS为由t-1时刻至t时刻的载荷变化;ωt-1为测量噪声. 传统的RUL预测中假设工况保持不变,因此退化参数被认为仅分配给一种工况.当考虑工况随时间变化时,需要为每个不同的工况设置不同的参数,并需要在预测退化状态之前依据预测工况进行参数选择.因此,本文利用Sun等[16]提出的CAPF方法在状态预测过程中添加了工况系数选择过程,使用条件激活向量来选择操作工况并匹配相应的参数.具体步骤如下. (2) 设置工况激活向量.令 (14) 式中: 1≤i,j≤k;η是退化率向量,ηi代表i工况下的退化率;α,β为跳变参数矩阵,αij,βij为i工况到j工况的跳变参数. 设置工况激活向量: (15) (16) 工况确定后, 可通过以下方程得到退化率与跳变参数: ηpt=Vtηt-1 (17) (18) (19) (3) 更新系统状态.将更新后的θpt代入系统退化方程并预测系统状态. (4) 更新权重与参数矩阵. 通过最新观测更新权重与参数: (20) (21) (22) (5) 重采样.重新进行粒子采样, 将所有权重设置为1/N. RUL定义为从当前时间到使用寿命结束的长度: rk=tEoL-tk (23) 式中:tEoL是使用寿命的终点;tk是预测时间点;rk是tk时刻的剩余寿命. 对于状态模型, RUL可以定义为当前时间和系统状态达到失效阈值之间的时间间隔: rk=inf (l|y(l+tk)≥D) (24) 式中:y(l+tk)是l+tk时刻的系统状态; inf(·)为下限函数;D为失效阈值. 本文所提基于 LSTM-CAPF框架的岸桥起升减速箱轴承寿命预测框架如图2所示,具体过程如下. 图2 LSTM-CAPF预测框架路线图Fig.2 Flow chart of LSTM-CAPF prediction method (1) 载荷离散化,确定工况边界. (2) 使用LSTM方法预测运行载荷及对应工况. (3) 轴承退化至故障期时,根据工况预测结果,采用CAPF方法预测轴承退化状态. (4) 轴承退化至失效期时,根据预测的轴承退化状态预测轴承RUL. 本文通过NetCMAS系统采集的某岸桥提升减速箱高速轴轴承自安装至失效的全寿命载荷-状态数据集验证所提出方法的有效性.该岸桥的结构与传感器的布置方式如图3所示.应力测点位于前拉杆和中拉杆之间的大梁上表面,振动测点垂直放置在提升减速箱外壳上.监测系统采样频率设置为 2 500 Hz,单次采样时间为0.8 s,采样间隔为8 s.分别采集并计算上述测点处的应力平均值与振动有效值,并分别以 10 000 点为一组计算平均值,形成载荷-状态序列. 图3 岸桥测点示意图Fig.3 Schematic diagram of quay crane measuring points 图4、图5分别为状态序列与平滑后的状态序列.从图5所示的平滑振动能谱可以看出,轴承退化明显可分为3个阶段:健康阶段、故障阶段和失效阶段[22].工况分类将在健康阶段完成,载荷及退化状态预测将从故障阶段开始,RUL预测将从失效阶段开始.在健康阶段,系统状态相对稳定,且该阶段下轴承的退化过程能够遍历整个载荷范围.根据港口常用的“轻载-中载-重载” 载荷分类模式,设置离散参数k′=3.失效阈值设置为岸桥维护人员检测到异常噪声时的振动有效值. 图4 起升减速箱全寿命振动有效值Fig.4 Effective value of hoisting gearbox life cycle vibration 图5 轴承退化阶段划分结果Fig.5 Division results of degradation stage of bearings 3.3.1LSTM预测载荷 目前还没有成熟的理论基础来有效地选取LSTM网络超参数[23].本次模型构建经反复尝试对比来搜索最优超参数.LSTM的最终参数选择如表1所示. 采用平均绝对误差(MAE)对预测结果进行评估: (25) 式中:Ri为第i预测点的剩余寿命预测值;ri为第i预测点的剩余寿命真实值. 为方便展示载荷预测结果,从预测序列中分别提取1、5、10、20、30步预测结果,构成对应步长的预测时序,如图6所示. 由图6可知,无论单步或多步预测,LSTM方法都能够跟踪岸桥工作载荷的变化趋势,并准确预测载荷.但随着预测步长的增加,预测载荷与真实值的偏离程度有所增加.表2定量分析了不同步长下的工况预测准确性,随着预测步长的增加,工况预测IMAE值逐渐上升,预测准确率相应下降,但都保持在可以信赖的水平.试验表明,当预测步长超过30步时,无法获得准确的工况预测信息. 表1 LSTM参数Tab.1 Parameters of LSTM 表2 不同步长下工况预测准确性对比 3.3.2CAPF预测系统状态 为验证本文所提预测框架的有效性,对比4种预测方法:M1,LSTM-CAPF框架; M2,LSTM-PF框架; M3,单一粒子滤波(PF)方法; M4,LSTM-F2S2[15]框架.M1、M2、M4均采用LSTM方法预测载荷变化;M2与M3忽略工况水平的影响且M3不考虑时变工况的影响;M4在工况分段稳定且已知的条件下表现良好, 将其作为对照组对比该方法与所提方法在工况连续变化条件下的模型表现. 图7为退化状态单步预测结果对比.在单步预测时,由于不区分工况,M3方法只能通过更大的噪声分布更新参数分布,所以会造成更大的预测误差,产生更多的误报警;M2方法相对M3方法能够取得较好的效果,但由于无法区分工况水平的影响,产生比M1方法更大的误差.表3为不同预测框架下预测MAE结果对比,结合步长为1时的预测IMAE值,单步预测时M2方法的IMAE值为0.72,与M4的0.68相近,小于M3方法的0.96,但大于LSTM-CAPF框架的0.37.这是因为LSTM-CAPF框架能够充分利用载荷预测信息,获得更准确的退化状态预测结果. 图6 不同步长载荷预测结果对比Fig.6 Comparison of load prediction results with different steps 图7 4种预测方案退化状态预测结果Fig.7 Prediction results of degradation state of four prediction schemes 表4列出了4种方案下单步状态预测分布结果的平均方差.预测结果平均方差越大,表明预测结果分布在更宽的范围内,预测结果的不确定性也越大.由表4可知,所提LSTM-CAPF框架的平均方差明显小于其他3种预测方案,表明所提方法能够降低状态预测的不确定性,从而验证了所提LSTM-CAPF框架在降低不确定性方面的优越性. 进一步分析表3可以得出,在多步预测中,在考虑时变工况的情况下,所提LSTM-CAPF框架能够明显提高轴承退化状态预测的准确性.同时对比M4方法可知,F2S2模型在工况已知且分段恒定的条件下表现良好,但在应对连续变化的载荷条件时,相较所提的LSTM+CAPF模型,其预测能力尚有不足.M3方法的IMAE显著增加,并在不同预测步长中达到最高.这是因为PF方法缺乏载荷变化和工况条件的预测信息.随着预测步长的增加,将导致状态预测误差逐渐累积.PF方法的预测结果表明,在动态负载条件下,如果没有负载预测,则无法完成准确的系统状态预测.M2方法由于忽略了工况条件对跳跃系数和退化率的影响,所以在每个预测步长的系统状态预测中生成比LSTM-CAPF框架更大的IMAE.同时,结合表3与表4可以看出,PF模型的偏差、方差均明显高于其他模型,LSTM-CAPF框架的偏差、方差均明显低于其他模型,这表明单一的模型难以同时处理变化工况与状态预测的任务,而所提方法能够控制预测偏差与预测不确定性,实现更精准的预测. 图8为RUL预测结果.可以看出,PF方法没有预测RUL的能力.在多步预测时,PF方法缺乏准确的载荷和工况预测,退化状态更新仅依赖于预测时间点的已知载荷,无法在变化的载荷水平条件下获得准确的退化状态,从而无法准确预测RUL.一旦当前时刻的工况条件为“重载”模式,RUL预测结果将显著降低.这也解释了表3中PF方法在不同步长条件下均产生最大MAE的原因.LSTM-PF方法具备了载荷变化信息,能够获得一定的轴承退化状态预测能力,但由于PF方法无法区分工况水平变化产生的退化率及跳变参数差异,预测退化状态时会产生更大的预测误差,产生更多误报警,使预测RUL值偏低;与LSTM-PF方法相比,LSTM-F2S2方案考虑了工况水平的影响,因此能够获得更准确的RUL预测结果,但由于该方法考虑的是分段恒定载荷,对实时变化的载荷条件对退化状态与RUL的影响不敏感,所以该方法的RUL预测准确度低于LSTM-CAPF框架.本文LSTM-CAPF框架能够克服以上方案的缺陷,提前预测载荷变化,并通过CAPF方法将该信息从载荷变化量和载荷水平两个方面进行处理,通过更新每个工况下的退化率与工况转换时的跳变参数,获得更精确的退化状态预测结果,从而获得更准确的RUL预测结果. 图8 4种预测方法RUL预测结果对比Fig.8 Comparison of RUL prediction results of four prediction methods 提出了一种基于LSTM-CAPF的岸桥起升减速箱轴承寿命预测框架,首先通过LSTM方法对岸桥工作载荷与对应工况进行预测,进而利用CAPF方法预测起升减速箱轴承的退化状态与RUL,得出以下结论: (1) LSTM能够学习时序数据随时间变化规律的能力,利用岸桥工作载荷在时间上的依赖关系,准确预测应力载荷及其对应工况. (2) CAPF算法可以解决工况动态切换时的参数匹配与更新问题.该方法根据载荷变化与工况切换情况,自适应地选择相应的条件参数并实时更新,能够更准确地预测系统退化状态. (3) 在变工况条件下,LSTM-CAPF预测框架在预测过程中增加了载荷及工况预测环节,通过动态匹配工况参数,能够处理岸桥起升减速箱轴承在变工况条件下的寿命预测问题. (4) 将岸桥前大梁上的应力测量点作为工况条件的特征.对于复杂系统,多个测量点的融合特征能够更准确地反映外部工况的变化.在未来的工作中,将考虑多传感器融合技术在动态工况分类与预测中的应用.1.2 长短时记忆网络



1.3 退化状态方程
1.4 CAPF方法

1.5 剩余使用寿命
2 LSTM-CAPF预测框架

3 实例分析
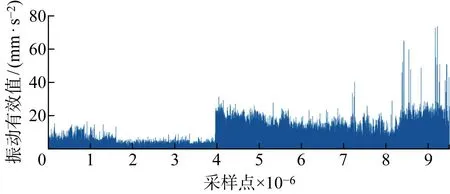
3.1 岸桥起升减速箱全寿命数据

3.2 退化阶段划分与工况分类

3.3 基于LSTM-CAPF框架的RUL预测





4 结论
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
小资CHIC!ELEGANCE(2022年1期)2022-01-11
成都信息工程大学学报(2021年5期)2021-12-30
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
数学物理学报(2020年3期)2020-07-27
法大研究生(2017年1期)2017-04-10
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
河北科技大学学报(2015年5期)2015-03-11