
铁路施工防护系统中多重冗余预警技术的研究
2024-03-26 09:00唐文国
铁路通信信号工程技术 2024年3期
唐文国
(中国铁路兰州局集团有限公司,兰州 730030)
目前铁路施工作业过程中,人身安全防护相关的工作角色包括司机乘务员、驻站联络员、现场防护员和现场作业员等。当有机车接近时,驻站联络员通过对讲机和现场防护员进行语音通讯来实现安全防护信息传递,对列车定位的手段比较单一,缺少信息的互联互通多方联控,对人身安全防护的保障效果较差。为有效遏制机车车辆撞轧事件发生,确保线上施工、运维人员人身安全,铁路施工防护系统利用公网和二次雷达通信技术,综合北斗定位等技术,进行一体化的施工流程管理、机车接近预警和人员超范围施工报警。实现车站、机车和施工现场的信息互联互通,是司机、驻站联络员、现场防护员和现场作业员的协同安全管理模式,全面提升施工区作业人员的安全水平。
对于列车与施工区接近防护,铁路施工防护系统采用多重冗余预警技术,即基于二次雷达推算预警和基于北斗定位推算预警。多重冗余预警技术可应对桥隧、雨雪等多种地理、气候环境,可以保证列车接近检测的可靠性,保障施工区作业人员安全。
1 铁路施工防护系统
铁路施工防护系统由列车接近报警子系统(预警子系统)、铁路施工区子系统(施工区子系统)、施工作业管理子系统(管理子系统)组成,如图1所示。列车接近报警子系统包括车载设备与地面装置,该系统通过二次雷达测距技术实现列车接近预警。铁路施工区子系统包括防护预警终端和作业预警终端。防护预警终端装备于现场防护员,能够展示站场图、施工区位置信息以及施工区相关报警信息,为现场防护员提供安全防护管理功能。作业预警终端装备于现场施工作业员,向现场施工人员提示报警。施工作业管理子系统实现管辖范围内的施工作业标准化、智能化卡控,实现对施工区信息初始化、人员上道、人员避车、人员恢复上道作业和结束施工的标准化管理,可对列车位置以及施工区位置进行监控。施工作业管理子系统可分层级部署相应终端,在监控中心操作终端可监督系统管辖范围内各条线路的施工情况,施工线路监控站操作终端可监督本站管辖范围内的施工区情况。
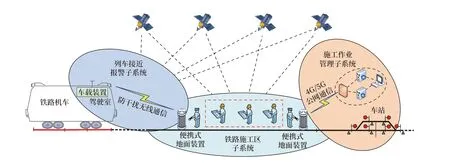
图1 系统架构Fig.1 System architecture
2 列车接近预警方式
对于列车与施工区接近防护,铁路施工防护系统采用多重冗余预警技术,即基于二次雷达推算预警和基于北斗定位推算预警。
基于二次雷达推算预警:车载装置实时从ATP获取车次号、公里标和运行方向信息,将此信息及二次雷达的距离测算信息发送至地面装置。地面装置结合自身配置的公里标、防护方向信息,判断列车与施工区距离,向管理子系统预警。地面装置将自身公里标、防护方向发送至车载装置,车载装置结合自身从ATP 获取的车次号、公里标和运行方向等信息判断与施工区距离,向管理子系统发送基于二次雷达测算的预警。
基于北斗定位推算预警:车载装置实时向管理子系统报告北斗定位信息,地面装置实时向管理子系统报告北斗定位信息,管理子系统将两者定位信息转发至相应施工区防护预警终端。由防护预警终端测算列车位置与施工区距离,向管理子系统发送基于北斗定位测算的预警,管理子系统再将预警信息转发至车载装置和地面装置。
预警机制根据车载装置和地面装置之间的距离进行预警的判定。在地面装置初始化时可设置车载装置和地面装置之间的预警距离,同时设置地面装置在本端或者对端。例如设置一级预警距离为1 500 m,二级预警距离为2 000 m,三级预警距离为3 000 m,地面装置在本端。车载装置从本端逐渐接近地面装置,当车载装置和地面装置之间的距离≤3 000 m 且>2 000 m 时,预警机制可判断为三级预警;当车载装置和地面装置之间的距离≤2 000 m 且>1 500 m 时,预警机制可判断为二级预警;当车载装置和地面装置之间的距离≤1 500 m 时,预警机制可判断为一级预警,直至列车通过施工区接近侧,预警机制可判断为无预警。
2.1 基于二次雷达推算预警
二次雷达技术采用问答形式获取信息,询问机发射询问信号,应答机接收到询问信号后反馈应答信号,询问机接收到应答信号后根据发射询问信号和接收应答信号的时间间隔计算前后间距。二次雷达在军事、航空航天、交通运输等领域有着广泛的应用前景,二次雷达技术具备传递信息的功能,可将二次雷达技术用于列车接近预警判定。二次雷达测距由车载装置和地面装置完成。车载装置和地面装置均包含雷达通信模块,雷达通信模块集成在车载装置中的发射机和地面装置中的接收机。车载装置安装在机车驾驶室,地面装置分别置于施工防护区两端,在不依赖任何固定基础设施的情况下建立列车接近预警屏障。车载装置与地面装置通过二次雷达可传递公里标等信息,进而对列车接近施工区进行预警。
如图2 所示,存在两个施工区,每个施工区存在两个地面装置。地面装置2 本端公里标为K11+700,对端公里标为K11+300,地面装置3 本端公里标为K12+600,对端公里标为K13+000。车载装置1 从公里标K12+300 处逐渐接近地面装置3,逐渐远离地面装置2,车载装置2 从公里标K12+000 处逐渐接近地面装置2,逐渐远离地面装置3。车载装置1 对于逐渐接近的地面装置3 进行接近预警判定,对于逐渐远离的地面装置2 不进行接近预警判定。地面装置2 对于逐渐接近的车载装置2 进行接近预警判定,对于逐渐远离的车载装置1 不进行接近预警判定。
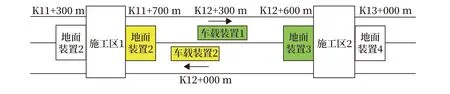
图2 基于公里标-车载装置接近或远离地面装置Fig.2 Onboard equipment approaches or moves away from wayside equipment based on kilometer post
如图3 所示,车载装置1 从公里标K10+300处逐渐接近施工区1 和施工区2,车载装置2 从公里标K14+000 处逐渐接近施工区2,车载装置通过广播可与4 个地面装置通信。车载装置1 根据各个地面装置公里标识别出施工区1 距离自身最近的地面装置1、施工区2 距离自身最近的地面装置3 进行接近预警判定。地面装置4 对于从本端接近的车载装置2 进行接近预警判定。

图3 基于公里标-车载装置(地面装置)识别最近地面装置(接近侧车载装置)Fig.3 Onboard equipment/wayside equipment identifies the nearest wayside equipment/onboard equipment in approach side based on kilometer post
2.2 基于北斗定位推算预警
北斗差分定位是一种高精度定位技术,通过差分处理可将定位精度提升到亚米级甚至更高。北斗差分定位具有高精度、实时性和可靠性的特点,广泛应用于航海、航空、地震监测和工程测量等领域。
车载装置和地面装置实时向管理子系统报告北斗定位信息。管理子系统将车载装置的北斗定位信息和地面装置的北斗定位信息转发至相应施工区的防护预警终端,由防护预警终端测算列车位置与施工区距离。然后防护预警终端向管理子系统发送基于北斗定位测算的预警信息,管理子系统再将预警信息转发至车载装置和地面装置。数据流转发如图4所示。
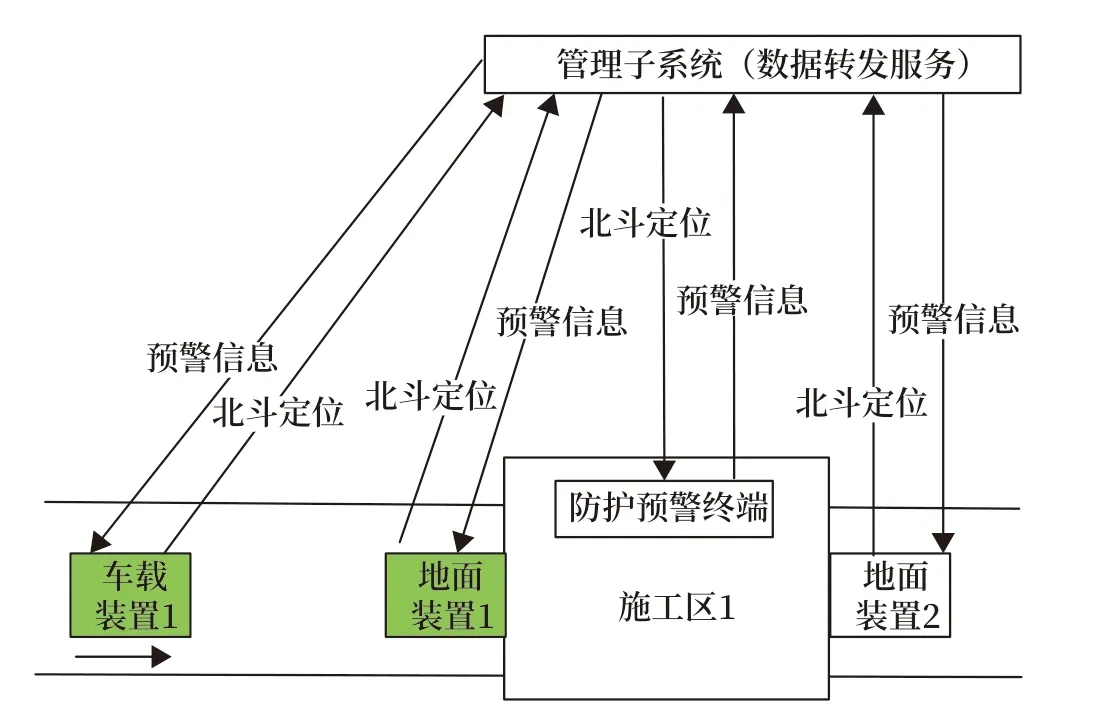
图4 基于北斗定位-数据流转发过程Fig.4 Data flow and transmission process based on Beidou system positioning
如图5 所示,施工区1 所在的经纬度约为112.34、39.92,施工区2 所在的经纬度约为113.54、38.72,车载装置1 和车载装置2 按图5所示方向前进。防护预警终端1 根据车载装置和地面装置的北斗定位信息判断出车载装置1 逐渐远离地面装置2,车载装置2 逐渐接近地面装置2。同理,防护预警终端2 根据车载装置和地面装置的北斗定位信息判断出车载装置1 逐渐接近地面装置3,车载装置2 逐渐远离地面装置3。所以,车载装置1 对于逐渐接近的地面装置3 进行接近预警判定,对于逐渐远离的地面装置2 不进行接近预警判定。地面装置2 对于逐渐接近的车载装置2 进行接近预警判定,对于逐渐远离的车载装置1 不进行接近预警判定。

图5 基于北斗定位-车载装置接近或远离地面装置Fig.5 Onboard equipment approaches or moves away from wayside equipment based on Beidou system positioning
如图6 所示,车载装置1 和车载装置2 按如图方向前进,防护预警终端1 根据车载装置和地面装置的北斗定位信息判断出施工区1 距离车载装置1最近的地面装置为地面装置1,防护预警终端2 根据车载装置和地面装置的北斗定位信息判断出施工区2 距离车载装置1 最近的地面装置为地面装置3以及车载装置2 从从本端接近地面装置4。所以,车载装置1 对于施工区1 距离自身最近的地面装置1、施工区2 距离自身最近的地面装置3 进行接近预警判定,地面装置4 对于从本端接近的车载装置2 进行接近预警判定。

图6 基于北斗定位-车载装置(地面装置)识别最近地面装置(接近侧车载装置)Fig.6 Onboard equipment/wayside equipment identifies the nearest onboard equipment/onboard equipment in the approach side based on Beidou system positioning
2.3 多重冗余预警融合
对于列车与施工区接近防护,系统采用基于二次雷达和基于北斗定位推算预警的多重冗余计算方案,可靠保证列车接近检测。系统将基于二次雷达测算的距离和基于北斗定位测算的距离进行比较,选取最小值作为列车距施工区距离。
由于桥隧、雨雪等多种地理、气候环境,基于二次雷达推算预警机制或者基于北斗定位推算预警机制可能会失效,即只有一种预警机制起作用时,管理子系统中的数据转发服务可将任一预警机制触发的预警信息转发至车载装置、地面装置和防护预警终端,车载装置、地面装置和防护预警终端均可正常预警。除此之外,在车载装置逐渐接近地面装置的过程中,如果基于二次雷达测算的车载装置和地面装置之间的距离大于三级预警距离,即无预警信息,而车载装置和地面装置接收到管理子系统转发的基于北斗定位的三级预警信息,则车载装置和地面装置显示三级预警信息。多重冗余预警机制保障了施工区作业人员的安全,保证了系统功能的可靠性。
如图7 所示,车载装置1 接近施工区1,施工区1 存在地面装置1,系统对车载装置1 和地面装置1 进行接近预警判定。系统采用多重冗余预警机制时,将基于二次雷达测算的距离和基于北斗定位测算的距离进行比较,选取最小值作为列车距施工区距离。例如在车载装置逐渐接近地面装置的过程中,基于二次雷达测算的距离为2 100 m,基于北斗定位测算的距离为1 900 m,则车载装置和地面装置之间的距离取二者的最小值,车载装置和地面装置之间的距离为1 900 m,预警等级为二级预警。
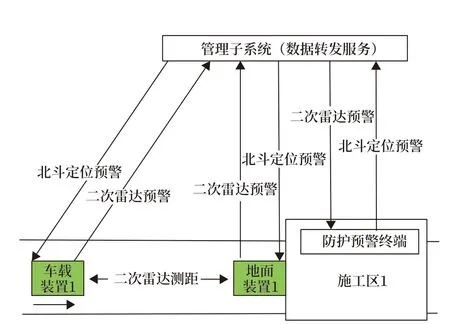
图7 基于二次雷达和基于北斗定位测距Fig.7 Distance measurement based on secondary radar positioning and Beidou system positioning
在车载装置逐渐接近地面装置的过程中,预警等级只能升级,不能降级,即上一时刻判定出二级预警后,下一时刻不可判定为三级预警,上一时刻判定出一级预警后,下一时刻不可判定为二级预警或三级预警。基于二次雷达测算的距离和基于北斗定位测算的距离可能存在误差,如图8 所示,在车载装置1 逐渐接近地面装置1 的过程中,t1时刻基于二次雷达测算的距离和基于北斗定位测算的距离最小值为1 900 m,预警等级为二级预警。t2时刻基于二次雷达测算的距离和基于北斗定位测算的距离最小值为2 100 m,此时预警等级不可判定为三级预警,仍维持二级预警。

图8 基于二次雷达和基于北斗定位测距时序Fig.8 Sequence of distance measurement based on secondary radar positioning and Beidou system positioning
3 试验与应用
对于列车与施工区接近防护,铁路施工防护系统采用多重冗余计算方案,即基于二次雷达推算预警和基于北斗定位推算预警,可靠保证列车接近检测,可应对桥隧、雨雪等多种地理、气候环境,提高了铁路施工作业的规范性和信息化程度,保障了施工区作业人员安全。该系统在某铁路局进行现场试验,现场试验包括试验设备安装、人工走行施划电子围栏、人员越界侵限报警、基于北斗定位的列车接近预警功能及其准确性和基于二次雷达的列车接近预警功能及其准确性等,试验结果正确且符合预期。系统成功在某铁路局应用部署,应用情况良好。
由于铁路施工防护系统采用多重冗余预警机制,该系统可在直线线路、曲线线路和桥隧等地理环境下应用。当列车运行轨迹为直线线路或者曲线线路时,基于二次雷达推算预警机制和基于北斗定位推算预警机制均起作用,系统选取二者最小值作为列车距施工区距离。当列车运行在桥隧时,由于桥隧中北斗定位不准或者失效,系统可采用基于二次雷达的推算预警机制计算列车距施工区距离,保障施工区作业人员安全。
4 总结
本文详细介绍了基于二次雷达推算预警和基于北斗定位推算预警的多重冗余预警技术。多重冗余预警技术可以有效保证列车接近施工区检测,及时生成预警信息,从而保证施工区作业人员的安全。
该技术虽然取得了一定成果,但还有一些不足之处:在隧道内无法获取列车及作业区人员的北斗定位信息,需要依靠既有手段人工防护。除此之外,基于二次雷达测算的距离和基于北斗定位测算的距离存在误差,需要在以后的研究工作中提高测距精准度。
猜你喜欢
军事文摘(2023年20期)2023-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
铁道通信信号(2020年8期)2020-02-06
当代陕西(2019年18期)2019-10-17
今日农业(2019年12期)2019-08-13
现代园艺(2017年22期)2018-01-19
中国公共安全(2017年11期)2017-02-06
太空探索(2016年3期)2016-07-12
火控雷达技术(2016年3期)2016-02-06
电源技术(2015年2期)2015-08-22
