
临时限速辅助决策系统的设计与实现
2024-03-26 08:59晋良波
铁路通信信号工程技术 2024年3期
佟 彤,许 巍,晋良波
(1.中国铁路武汉局集团有限公司电务部,武汉 430071;2.北京全路通信信号研究设计院集团有限公司,北京 100070;3.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
临时限速(Temporary Speed Restriction,TSR)是保证列车安全运行的重要手段,也是高铁列控系统的核心功能之一。随着线路规模的日益扩大、复杂程度的日益提升,临时限速的漏下、错下都可能带来极大的安全隐患。当前临时限速命令操作过程存在以下问题:临时限速命令的拟定,需要人工查阅列控工程数据,将工务线路、里程转换为对应的电务线路号、起止里程标系及公里标,因人工转换失误导致限速命令无法下达。此外,复杂的临时限速命令正式下达前往往需要在真实运营环境中进行预演,预演依赖现场运营设备,预演效率低且影响真实列控系统。为解决以上问题,本文研究基于工务限速需求的临时限速参数自动生成方法,并结合集成化列控设备仿真技术,设计并实现临时限速辅助决策系统。此系统可根据施工计划中限速需求自动生成电务临时限速命令所需的参数,支持限速正式下达前的预演,使限速预演具备独立于现场运营的仿真环境,辅助临时限速操作人员进行限速规划。
1 系统功能
临时限速辅助决策系统包括限速命令生成功能和仿真预演功能,如图1 所示。其中限速命令生成功能根据相关人员输入的工务线路名称与起止里程自动推算临时限速所需的线路号、起止里程系及具体里程值等参数,运算结果可辅助相关人员进行限速预演。仿真预演功能通过对调度集中控制系统(Centralized Traffic Control,CTC)临时限速相关功能及其管辖范围的临时限速服务器(Temporary Speed Restriction Server,TSRS)、列控中心(Train Control Center,TCC)、无线闭塞中心(Radio Block Center,RBC)进行仿真,构建与真实运营场景相同的临时限速操作环境,支持在限速命令正式下达前进行预演。
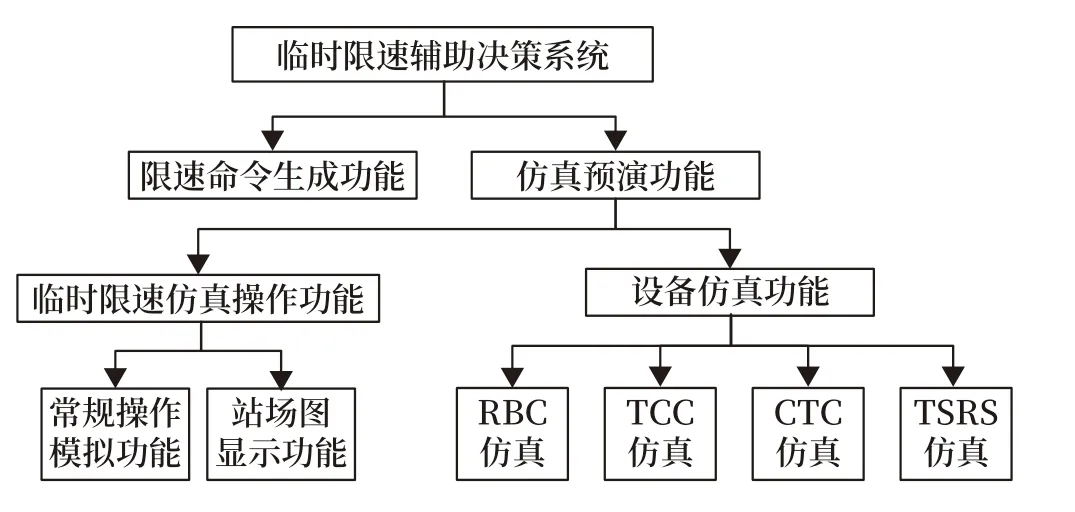
图1 系统功能树Fig.1 System function tree
2 系统设计
2.1 系统总体结构
系统由限速命令生成子系统和仿真预演子系统组成,各子系统形成独立的微服务。限速命令生成子系统根据用户输入的工务参数生成临时限速参数,并对已生成的限速命令进行管理,子系统表示层包含限速命令生成界面及命令管理界面,业务逻辑层包含限速参数推算模块及命令管理模块,数据接口层包含数据库接口模块;仿真预演子系统为相关人员提供虚拟限速预演环境,子系统表示层包含站场图界面及限速预演操作界面,业务逻辑层包含CTC模拟及列控设备模拟,数据接口层包含数据库接口模块、以太网接口模块和文件接口模块。系统结构如图2 所示。
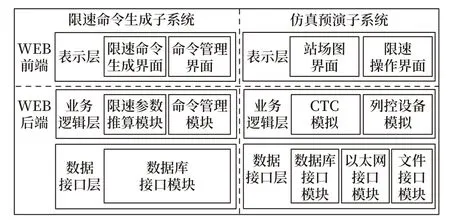
图2 系统结构Fig.2 System structure
2.2 限速参数生成方法
限速相关操作人员从施工调度系统获取限速及行车方式信息,从中提取工务线路名称、起始里程、终止里程和限速值等限速需求关键信息。系统根据此信息自动生成临时限速命令下达所需的电务线路名称、起始公里标、终止公里标和起止里程标系等信息。
系统对工务线路与电务线路的映射关系建模,形成工务-电务线路映射表。将某条工务线路拆分为多个子线路,每一个子线路对应不同类型的电务线路,工务线路与电务线路映射关系可分为3 种:非列控管辖,正线和侧线。非列控管辖表示该工务线路子线路不属于列控TSRS 管辖范围,正线表示该工务线路子线路对应电务正线线路,侧线表示该工务线路子线路对应电务车站内的侧线线路。在映射表中对于正线映射类型需明确该工务子线路对应的电务线路里程标系、起始/终止里程、线路号。对于侧线映射类型需明确该工务子线路对应的电务侧线线路号、车站。以汉口枢纽调度台管辖范围内的滠武线上行为例说明工务-电务映射关系,工务-电务线路示意如图3 所示。工务线路滠武线上起讫里程为24+290 km 至0+000 km,从24+290 km 至22+075 km 为非列控管辖范围、里程22+075 km 至20+640 km 为电务线路46 号线、里程20+640 km 至20+458 km 为肖马阳线路所站内4 号侧线、里程20+458 km 至0+114 km 为电务线路34 号线、里程0+114 km 至0+000 km 为非列控管辖范围。

图3 滠武线上工务-电务线路示意Fig.3 Schematic diagram for civil works and signal system of up track of Shekou-Wuchang line
按照上述滠武线上工务里程及对应的电务线路里程可建立如表1 所示的工务-电务线路映射。

表1 滠武线上工务-电务线路映射Tab.1 Line mapping between civil works and signal system of up track of Shekou-Wuchang line
限速命令生成主要流程如图4 所示。系统根据用户输入的起始线路名称、起始工务里程值、终止线路名称和终止工务里程值,查找映射表获取起点所在的工务线子路及对应电务线路、终点所在的工务子线路及对应电务线路。如果起始工务线路名称和终止工务线路名称相同,则根据映射表搜索出起点和终点之间该工务线路包含的工务子线路及其对应的电务线路集合。如果起始工务线路名称和终止工务线路名称不同,则需跨工务线路进行搜索,具体逻辑为:首先在起点所在的工务线路中搜索出起点所在的工务子线路至该工务线路内最后一个工务子线路的集合A,在终点所在的工务线路中搜索出该工务线路内第一个工务子线路至终点所在的工务子线路集合B。遍历集合A 和集合B,如果集合A中某个子线路a 的终点里程连接了集合B 中的某个子线路b,而集合B 中的子线路b 的起点连接了集合A 中子线路a,则找到两条工务线路的连接关系,进而根据线路映射表搜索到起点和终点之间包含的电务线路集合。搜索到起点和终点之间包含的电务线路集合后,根据电务线路的线路号、里程标系、里程值等字段确定限速命令参数。
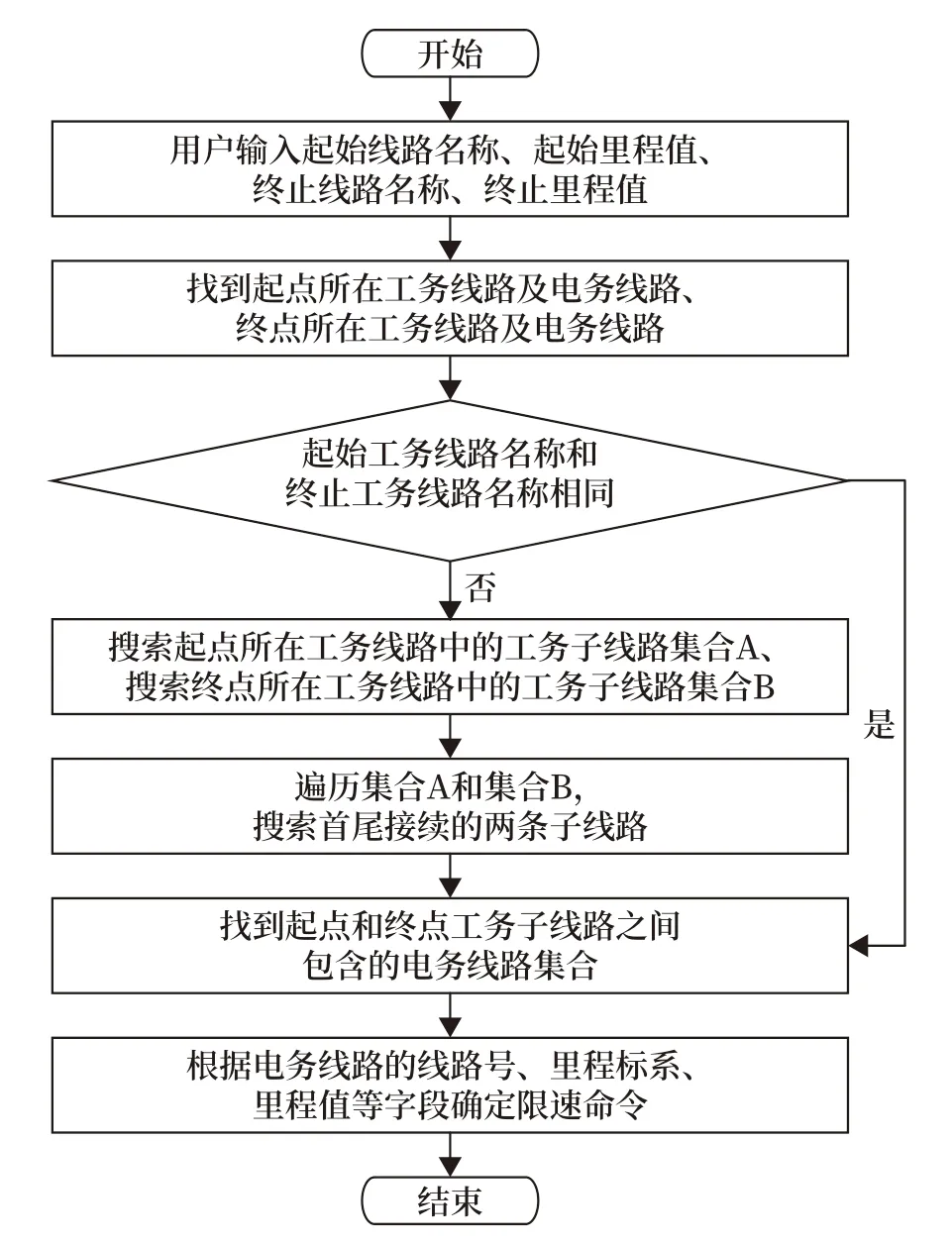
图4 限速参数生成流程Fig.4 Flow chart of TSR parameters generation
在搜索到起点和终点之间包含的电务线路集合后,需对集合中的电务线路进行分解,生成所需的限速命令参数。
以枢纽调度台正线、侧线接续的复杂场景为例,选取滠武线上行工务里程范围21+100 km 至20+800 km 进行限速参数生成。里程范围内对应的电务线路集合:46 号线。系统遍历电务线路集合获取首段线路即46 号线,将21+100 km 作为限速命令起始里程,并获取该电务线路里程标系SWK 作为限速命令起始里程标系,同时检查20+800 km是否在电务46 号线覆盖范围内。20+800 km 在该电务线路覆盖范围内则以20+800 km 作为终止里程,将SWK 作为终止里程标系并结束遍历,系统生成一条限速命令,如表2 中序号1 对应的结果。

表2 限速参数生成结果Tab.2 Generation results of TSR parameters
如果选取滠武线上行工务里程范围21+100 km至20+500 km 进行限速参数生成。里程范围内对应的电务线路集合:46 号线、站内侧4 线。系统仍按上述逻辑判断20+500 km 不在46 号线覆盖范围内,则首先将46 号线终止里程20+640 km 作为限速命令1 终止里程,SWK 作为终止里程标系。系统继续遍历至电务线路集合中第二段线路即站内侧4 线,判断集合中第二段电务线路与第一段线路线路号及里程标系不同且为侧线线路,则对限速命令进行分解并创建限速命令2,由于限速命令2 为侧线线路,无需关注里程及里程标系参数。至此,系统生成限速命令1 与限速命令2 两条限速命令,如表2 中序号2 对应的结果。
2.3 列控集成化仿真
仿真预演子系统需提供与真实运营列控系统一致的仿真环境,因而涉及列控设备较多。若每个设备仿真作为独立的进程运行会耗费较多硬件资源。本文采用集成化仿真技术,将各个列控设备应用层主机逻辑封装为动态链接库,由仿真调度模块统一调用,将众多列控仿真集成为一个独立的进程,降低系统部署成本。
仿真预演子系统包含列控设备模拟与CTC 模拟。列控设备模拟包含若干TSRS 模拟、TCC 模拟和RBC 模拟。所有列控设备模拟可集中部署于一台服务器,CTC 模拟以Web 微服务形式独立部署于一台服务器。列控设备模拟包含配置文件接口模块、以太网接口模块、仿真调度模块和若干设备模拟模块。仿真预演子系统结构如图5 所示。
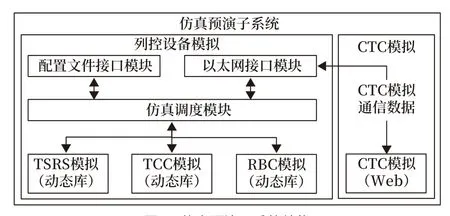
图5 仿真预演子系统结构Fig.5 Structure of simulated rehearsal subsystem
为最大程度上保证仿真逻辑的真实性,设备模拟将真实设备主机应用层逻辑从主机软件剥离并将其封装为动态链接库。通常主机程序运行于安全平台,调用安全平台提供的API 接口完成数据收发及逻辑运算,在封装过程中以静态库形式提供安全平台API 接口的PC 版模拟,使主机应用层代码能够以动态库形式被普通PC 程序调用。此外,以动态链接库导出函数的形式提供应用数据接口,使仿真调度模块通过应用数据接口实现与设备模拟模块的数据交互并驱动其周期运行。将包含平台API 仿真接口的静态lib 库与应用数据接口以及主机应用层代码共同编译,生成设备模拟动态链接库,如图6 所示。
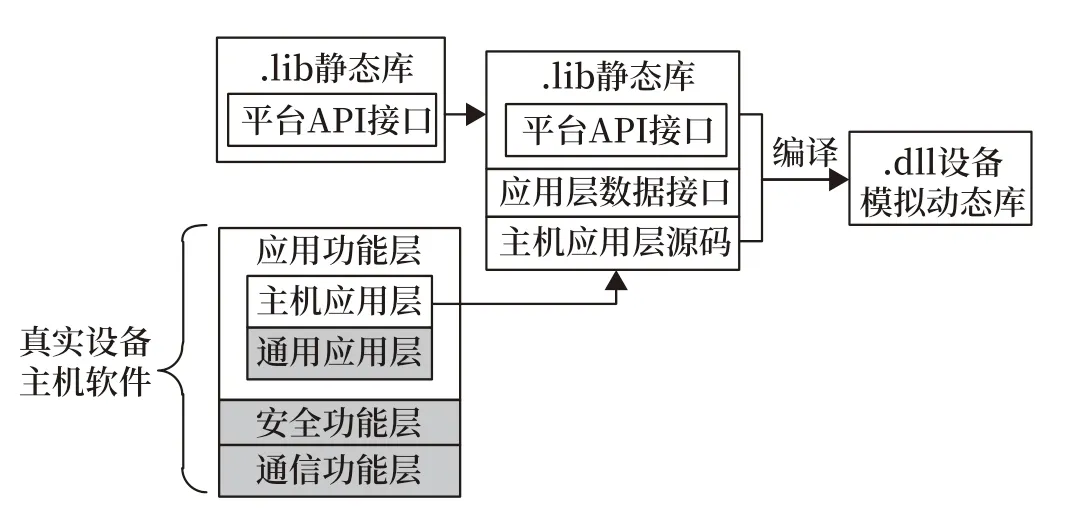
图6 设备模拟模块动态库生成原理Fig.6 Principles of dynamic library generation for equipment simulation module
仿真调度模块周期依次调用各个设备模拟动态库的导出接口函数,驱动各设备模拟模块运行并实现各设备模拟模块间数据交互。以设备TSRS 和RBC 为例说明仿真调度模块工作过程。仿真调度模块为实现数据转发,为TSRS 与RBC 维护两个消息队列,分别存储TSRS 发送至RBC 的数据以及RBC 发送至TSRS 的数据。当仿真调度模块当前遍历至TSRS 设备模拟时,首先从RBC 至TSRS 数据队列中获取发送至TSRS 的数据,通过TSRS 设备模拟的应用数据接口将数据传递至TSRS 内部接收队列,之后调用TSRS 设备模拟的应用接口驱动TSRS 进行本周期逻辑运算,最后通过TSRS 设备模拟的应用数据接口获取TSRS 发送至RBC 的数据并存储到TSRS 至RBC 队列。当仿真调度模块遍历至RBC 设备模拟时,首先从TSRS 至RBC 队列获取发送至RBC 的数据。重复上述流程,实现各设备模拟模块间数据交互以及逻辑运算。
3 应用与展望
临时限速辅助决策系统对武汉枢纽调度台管辖范围内线路数据进行建模,可提供覆盖枢纽TSRS临时限速管辖范围的仿真预演环境。系统已在武汉枢纽调度台部署试用,系统提供便捷的限速命令生成界面,以及便捷化限速仿真预演环境,辅助调度员准确、高效地进行限速规划。
目前系统运行独立于真实列控系统,需要通过人工录入方式使系统内临时限速与现场保持一致。未来可通过抓取TSRS 发送至CTC 的限速命令数据,实现与真实环境临时限速命令的自动同步,进而可实现对现场临时限速状态的监控和管理。
4 总结
本文针对目前临时限速拟定过程中限速参数规划困难,限速预演依赖真实运营环境,预演效率低且影响真实列控系统等问题,研究基于工务限速需求参数自动生成临时限速参数相关方法,并研究集成化列控设备仿真技术,在此基础上设计并实现临时限速辅助决策系统。系统可快捷、准确地生成临时限速命令参数,并提供低成本、集成化的限速仿真预演环境。该系统经过部署试用,可有效解决相关临时限速操作人员限速命令规划困难,预演效率低下的问题。
猜你喜欢
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年9期)2020-02-06
铁道通信信号(2018年6期)2018-08-29
铁道通信信号(2018年5期)2018-06-28
铁道通信信号(2018年4期)2018-06-06
上海铁道增刊(2017年3期)2018-01-22
上海铁道增刊(2017年2期)2017-04-18
中国法治文化(2015年10期)2015-01-30
中国洗涤用品工业(2011年3期)2011-03-20
