
基于电流注入法的模块化多电平换流器损耗建模
2024-03-25 12:15彭光强黄之笛苏蕊武霁阳何竞松燕京沈卓轩邢月
南方电网技术 2024年2期
彭光强,黄之笛,苏蕊,武霁阳,何竞松,燕京,沈卓轩,邢月
(1. 南方电网超高压输电公司电力科研院,广州 510663;2. 清华四川能源互联网研究院,成都 610299;3. 清华大学深圳国际研究生院,广东 深圳 518055)
0 引言
近年来,柔性直流输电(voltage source conver
ter based high voltage direct current transmission,VSC-HVDC)以其运行方式灵活、谐波含量少等优点成为新一代直流输电方式[1-4]。随着电压等级提高以及输电容量增大,基于模块化多电平换流器(modular multi-level converter,MMC)的柔性直流输电技术得到了越来越多的关注。与基于晶闸管的常规直流换流器相比,MMC 的阀体损耗较大,在对换流器运行效率等方面的研究中对损耗计算与仿真模拟的精确性有较高要求[5-9]。
MMC 拓扑结构灵活,子模块数量多,换流器阀体的损耗计算复杂[10-13]。同时MMC 换流阀的损耗由实际开关器件产生,然而在系统仿真中由于构成MMC 的子模块数量众多,建立MMC 系统的详细开关模型会导致节点导纳矩阵阶数过高,极大影响了仿真速度,基于实际开关元件的详细模型无法用于大规模电力系统的仿真,因此通常需要对MMC 模型进行适当简化[14-16]。为兼顾仿真的精度与运行效率,MMC 仿真模型通常不考虑开关器件的导通损耗、开关损耗等。
然而在实际仿真应用中一些研究不仅关心MMC 系统稳态运行及故障暂态电压电流等,还希望借助电磁暂态仿真准确考虑及计算阀组损耗、乃至器件结温[17-18],以研究在不同电源侧及负荷侧工况不同控制策略及运行方式下系统的运行效率,为开展高压直流系统主网架经济运行研究提供重要的研究方法支撑。但由于现有的仿真软件提供的MMC 模型不能准确进行损耗计算,而在既有的研究文献中损耗精确计算的算法对计算资源消耗过大,不能适应系统级仿真的需要。
为了在兼顾仿真效率的同时提高仿真模型精确度,本文提出了一种准确考虑换流站损耗的柔性直流电磁暂态仿真建模与计算的方法。该方法基于PSCAD的柔性直流电磁暂态模型,加入损耗计算模块并采用电流注入法动态跟踪和补偿阀体损耗,适用于精确考虑阀体损耗的柔性直流电磁暂态建模。
1 柔性直流换流站电磁暂态模型
1.1 MMC拓扑及运行原理
MMC 采用模块化设计,是一种三相六桥臂结构[19-21],每相包含两个桥臂,每个桥臂由一个电抗器和N个子模块(sub-module,SM)串联而成,如图1所示。
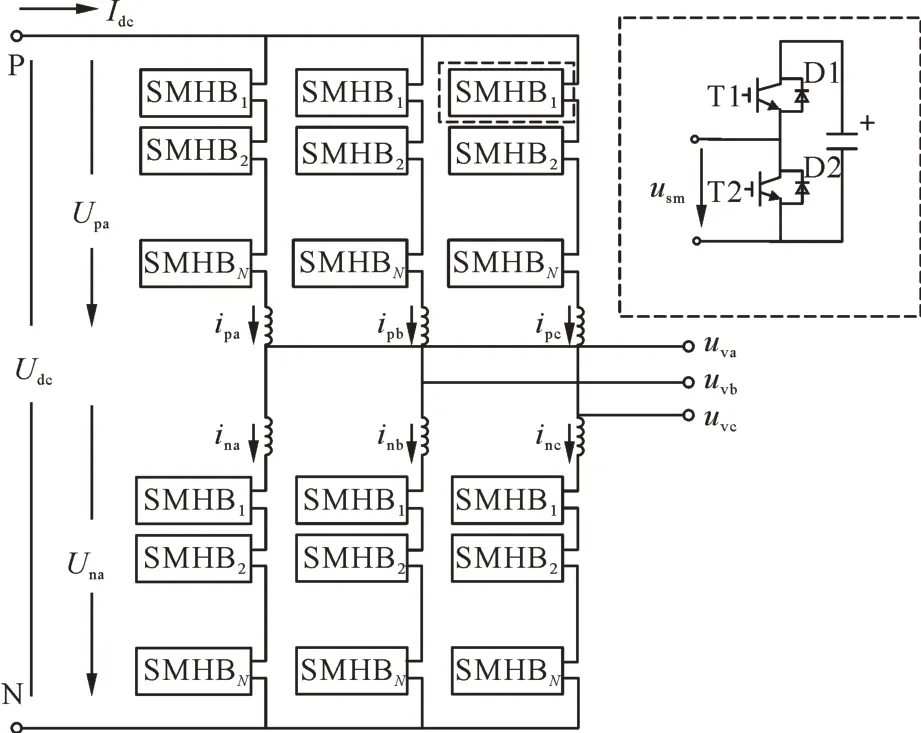
图1 模块化多电平换流器的拓扑结构图Fig. 1 Topology diagram of MMC
以目前应用最广的半桥型子模块拓扑为例[22]。图1 的半桥型子模块中usm为子模块两端的电压。Udc为MMC 的直流侧电压,Upa、Una分别为上、下桥臂电压,uva、uvb、uvc为a、b、c 三相交流电压。MMC 正常运行时需满足两个条件:1)维持直流电压uDC恒定;2)交流测输出三相交流电压[23-24]。
1.2 仿真模型虚拟损耗及问题
系统级仿真中,通常需要根据不同应用场景选择使用不同的MMC 简化模型[25-28]。简化模型未考虑开关器件导通损耗、开关损耗等,仿真得到的损耗结果很可能与实际损耗情况偏离严重。综合考虑计算精度与计算速度,本文使用戴维南等效模型进行MMC 建模[29-30],通过将每个子模块等效为电压源与电阻串联的形式,实现了高精度与高效率并重。单个子模块的戴维南等效电路如图2 所示,图2 中Rsm_i为子模块戴维南等效电阻,其他参数含义详见式(1)—(3)。
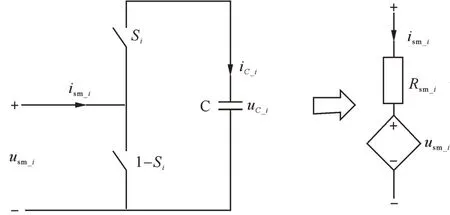
图2 单个子模块的戴维南等效电路Fig. 2 Thevenin equivalent circuit for a SM
以j相r桥臂第i个子模块为例,对于正常工作状态下的MMC 子模块,戴维南等效电路计算公式如式(1)—(3)所示。
式中:Si为子模块的开关函数,其值为1 时代表子模块投入,为0时代表子模块切除;iC_i为流过子模块电容器的电流;uC_i为子模块的电容电压;usm_i为子模块的戴维南等效电压;ism_i为子模块桥臂电流;C为子模块电容器的电容值。
受控源数值求解为控制部分,主电路方程求解为电气部分。在仿真软件的计算过程中通常将控制电路与电气电路分开求解,子模块等效电源的计算依赖于前一时步的桥臂电流,即电压源的计算存在一个时步延时。此时,单个子模块的电流与电压关系如式(4)—(5)所示。
式中:t为时间;Δt为延时值。
在MMC 的结构中N个子模块为串联连接,因此j相r桥臂的两侧功率为:
式中:Parm(t)为换流器交流侧的功率;PCon(t)为换流器直流侧的功率。
将式(4)—(5)代入式(6)—(7),可得损耗功率ΔP为:
损耗功率∆P是由于模型计算单步延时产生的虚拟损耗,并非系统的实际损耗,根据运行条件和仿真参数的不同,这部分虚拟损耗可能占到换流阀总损耗的很大一部分[31],在需要精确模拟换流器损耗对系统动态响应影响的场景下,由于虚拟损耗的存在,MMC 仿真模型的阀体损耗与实际系统之间存在误差,因而会影响仿真结果准确性。
2 基于电流注入法的MMC损耗建模
2.1 方法流程
为了精确模拟换流阀损耗对于系统动态响应的影响,需要运用数学计算公式对换流阀损耗进行计算,得到准确的损耗参考值。在得到损耗参考值后需要采用注入电流的方法动态跟踪并校正仿真模型的损耗值,保证对换流阀损耗的精确模拟。损耗计算原理如图3 所示。损耗计算以a 相上桥臂计算为例,其余桥臂计算过程类似。

图3 电流注入法计算原理Fig. 3 Calculation principle of current injection method
2.2 损耗计算方法
MMC 换流器损耗主要由阀体、变压器、桥臂电抗器和直流滤波器的损耗构成,根据标准GB/T 35702.1—2017[32],阀体损耗主要包括IGBT 的导通损耗、开关损耗和二极管器件的导通损耗、反向恢复损耗,本文主要对阀体损耗进行分析。
MMC 阀体损耗计算结果可由有限采样法获得,此方法共分为5个步骤。
1) 输入参数
需要输入系统传输功率、直流电压、交流电压等,这些数据将作为此计算方法的输入。
2) 计算MMC桥臂电流
以a 相上桥臂为例,利用输入的参数依次计算出MMC 的直流电流Idc、交流电流iva,如式(9)—(10)所示。在不考虑二倍频环流的前提下计算出桥臂电流ipa,如式(11)所示。
式中:Smmc为流过MMC 的功率;fn为基准频率;Idc为直流侧电流;iva为交流侧电流。
3) 拟合开关元件输出特性与开关损耗曲线
根据厂家提供的数据文件获得与损耗计算相关的信息,从而应用数据拟合方法得到开关元件输出特性与开关损耗曲线。根据某实际开关元件数据得到的拟合曲线如图4—5所示。

图4 IGBT输出特性曲线Fig. 4 IGBT output characteristic curve
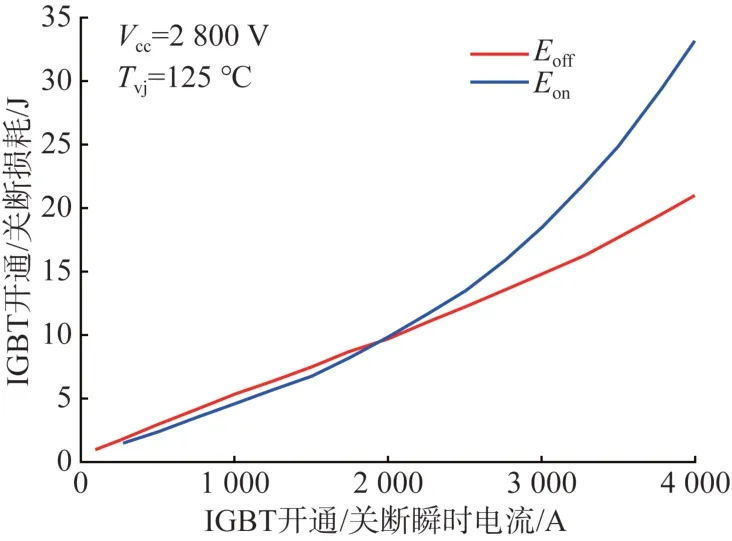
图5 IGBT开通/关断损耗曲线Fig. 5 IGBT turn-on/turn-off loss curves
4) 计算单个子模块损耗
本文采用有限采样法计算损耗。首先进行采样,在桥臂电流的一个周期内等距选取N个点;其次通过N个采样点的电流值,在步骤3)的拟合曲线中得到对应的电压值和损耗值。最后将每个子模块内所有开关器件的损耗求和,得到单个子模块损耗。
5) 计算MMC阀体总损耗
将一个桥臂内所有子模块损耗求和,其他桥臂重复步骤2)—4),将所有桥臂损耗相加,即可得到阀体总损耗。
2.3 注入电流法
通过对换流阀损耗展开数学分析计算可得开关器件的导通损耗与开关损耗均与桥臂电流正相关,而桥臂电流的大小与传输容量成正比,因此根据系统不同工况下的传输容量即可确定损耗参考值的大小。
由于虚拟损耗的存在导致损耗参考值与仿真电路损耗实测值之间存在误差,虚拟损耗是仿真计算过程中存在一步延时导致的。为了研究换流器损耗对系统动态响应的影响并解决虚拟损耗带来的仿真误差问题,需要改进仿真电路以实现对损耗的准确模拟,本文使用注入电流的方法实现对损耗参考值的动态跟踪与补偿。
1)注入电流位置
换流阀损耗与桥臂电流呈正相关。以a相为例,系统正常工作时忽略MMC 内部换流,上、下桥臂电流为:
式中ipa、ina分别为上、下桥臂电流。
由于现有仿真软件中MMC 模块为封装模块,无法对其内部结构进行修改,因此直接对桥臂电流进行控制难度较大。由式(12)—(13)可知,桥臂电流由直流侧电流和交流侧电流共同决定,交流侧电流为三相电流,包含幅值和相位,控制环节较为复杂;直流侧电流只需要控制幅值单个变量,控制较为简单,因此通过在MMC 直流侧出口位置注入电流以间接改变换流阀桥臂电流,进而补偿MMC 模型损耗偏差。
2)注入电流类型
采用电流注入法的目标是实现损耗参考值的动态跟踪与补偿,基于这个目的注入电流的类型可以选择并联受控电流源、并联受控电流源加并联电阻、并联受控电流源加串联电阻。其中,电阻用于模拟部分固定损耗,电流源的大小由不同运行工况下的损耗参考值决定,根据2.2 所述的损耗值计算方法,扫描形成全运行工况下的损耗功率参考值。为了实现对损耗值的动态跟踪,采用比例积分(proportional integral,PI)控制方式实现电流源数值的实时更新,保证换流阀损耗的准确模拟,提高仿真精度。
3)PI控制跟踪
计算出多种运行工况下的损耗参考值之后,通过线性插值的方法扫描形成全工况运行曲线。根据系统的传输功率即可采用查表法自动生成与之对应的损耗参考值。参考计算结果在仿真模型中采用电流注入法对损耗进行补偿,为了实现对不同损耗值的动态跟踪,引入PI 控制方式,图6 为注入电流的PI控制方法。

图6 注入电流的PI控制方法Fig. 6 PI control method of injected current
图6 中Ploss_ref为通过查找表得到的损耗参考值,Ploss为仿真模型实测损耗值。通过引入PI 反馈控制与前馈控制环节辅助校正仿真模型损耗值,从而实现损耗的动态跟踪。其中,P为比例系数,比例反馈控制是一种立即控制,能够对即时偏差快速做出响应,减小静差,但P过大时会增大系统的超调量;I为积分系数,积分反馈控制是一种修复控制,当系统出现偏差时能够控制系统向着消除偏差的方向移动,输出控制量使得测量值最终稳定在参考值附近。
通过合理设置PI参数,即可达到动态跟踪损耗参考值的效果。PI参数的调节过程中,首先将比例系数设为0,调节积分系数,将积分系数从小到大逐步增大,直至系统出现震荡,记录下此时的I值;加入比例环节,记录系统出现超调时的数值。在测试值附近对PI参数进行微调,即可得到理想的PI参数。
为了避免系统波动对PI跟踪效果产生影响,加入前馈控制环节。前馈控制为预测控制,它不受系统滞后的影响,能够更加及时地进行控制。引入前馈控制能够有效避免扰动过大时PI 调节过于灵敏,导致系统始终处于震荡之中。
3 仿真案例
3.1 基于PSCAD的模型实现
为了验证上述方法模拟损耗的准确性,在PSCAD 中搭建双极MMC-HVDC 输电系统,系统结构如图7 所示,其主要参数见表1。系统使用载波移相调制策略和传统电容电压排序均压控制策略,换流站1 采用定直流电压控制和定无功功率控制,换流站2 采用定有功功率控制和定无功功率控制。
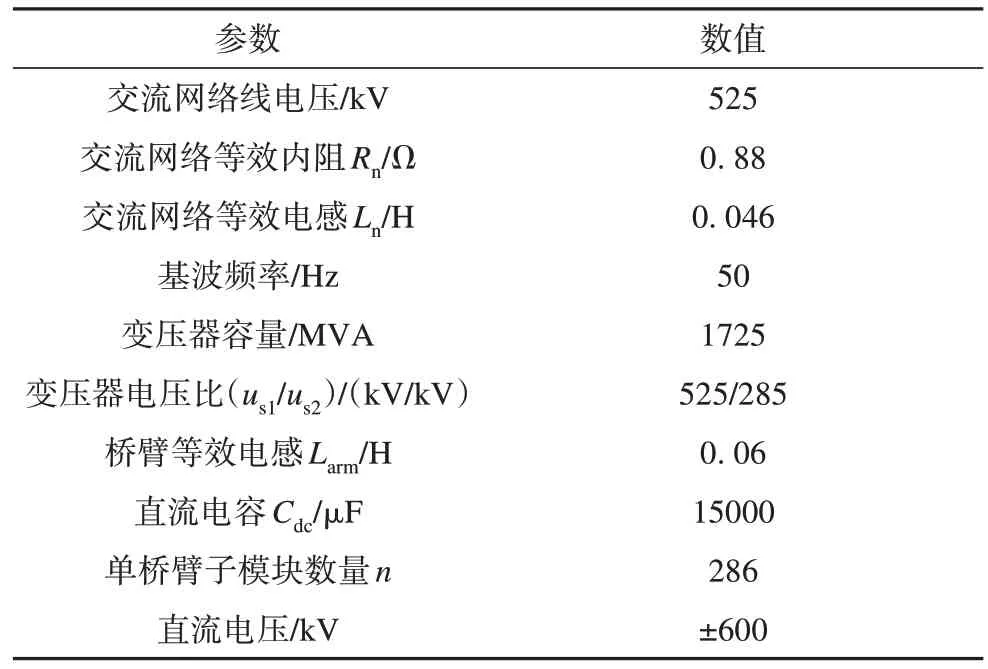
表1 系统主要参数Tab. 1 Main parameters of the system
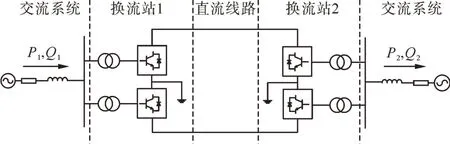
图7 双极MMC-HVDC系统结构图Fig. 7 Diagram of bipolar MMC-HVDC system structure
针对此双极MMC-HVDC 系统,根据2.1 所述损耗计算方法计算出多工况下的损耗参考值,在PSCAD 中建立了损耗计算模块,扫描形成全运行工况的损耗曲线。图8 为载波频率为150 Hz 时计算得到的单极损耗参考值曲线。
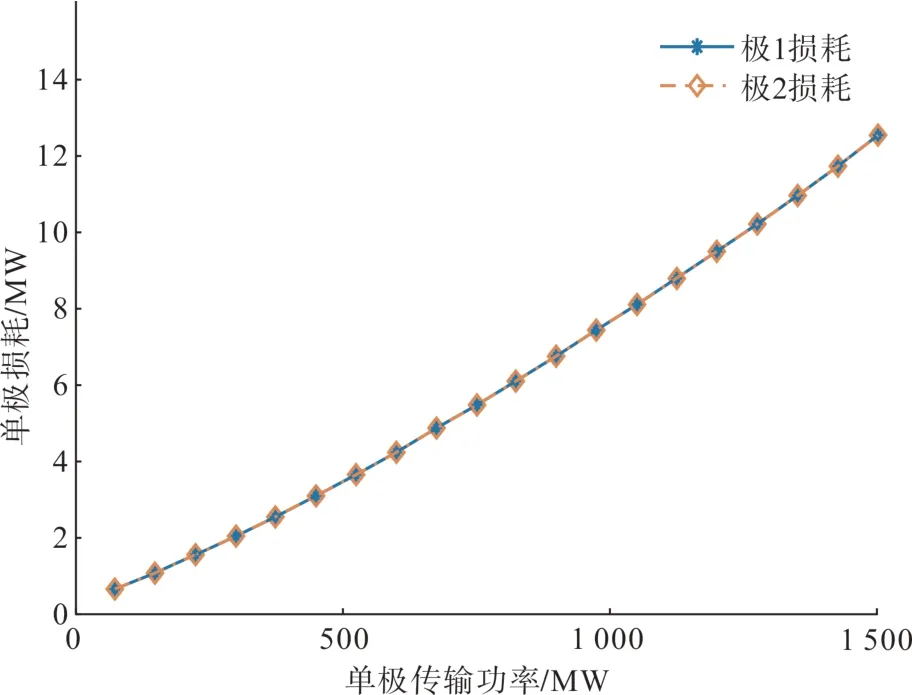
图8 载波频率为150 Hz时损耗参考值曲线Fig.8 Curves of loss references when the carrier frequency is150 Hz
设置直流电压参考值为600 kV,单极有功功率参考值为1 500 MW,无功功率参考值为0 Mvar,根据系统仿真结果,此时两极损耗分别为10.377 MW 与10.338 MW。根据2.1 所述损耗计算方法,此运行工况下的理论损耗值为12.529 MW 和12.537 MW,理论值与实测值不相符。为了实现对换流阀损耗的准确模拟,需要对原模型进行改进,建立基于电流注入法的含阀体损耗的柔性直流电磁暂态模型。
3.2 改进模型仿真结果
根据扫描得到的损耗参考值,使用电流注入的方式模拟并补偿换流阀实际损耗。为了比较不同注入电流类型对于损耗补偿的效果,分别建立并联受控电流源、并联受控电流源加并联电阻、并联受控电流源加串联电阻3 种电磁暂态模型。受控电流源的计算采用经典的PI 控制方式实现损耗的动态跟踪,从而完成损耗修正,提高系统仿真的准确性。
以载波频率为150 Hz、总传输功率为3 000 MW 为例,此时根据线性插值方法计算得到的极1损耗参考值为12.529 MW,极2 损耗参考值为12.537 MW,通过搭建3.1 所述模型并进行仿真,使用3种改进模型仿真得到的损耗值如表2所示。
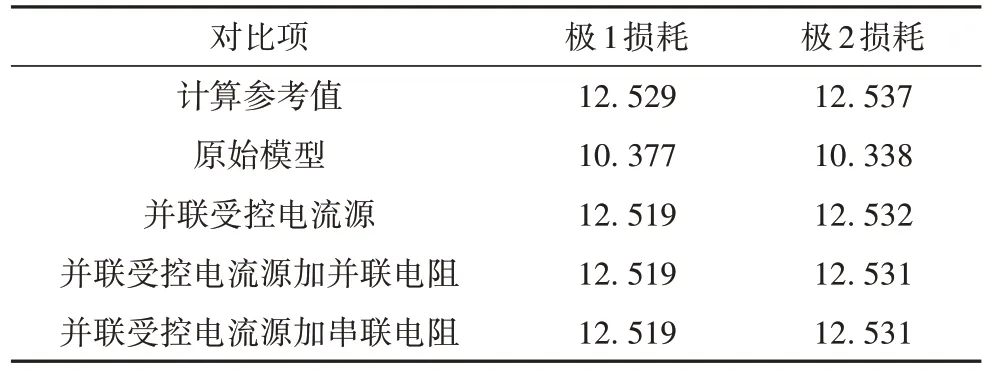
表2 3种改进模型仿真损耗值Tab. 2 Simulation loss values of three improved models MW
由表2 可以看出,相比于未使用注入电流源的原始模型,本文提出的3 种基于电流注入的含阀体损耗的改进仿真模型,均能将换流阀损耗稳定在各自的参考值附近,与理论数据相符。为了降低注入电流对原系统的影响,选择接入元件最少的并联受控电流源模型展开分析。
图9—10 为传输功率变化时仿真模型的极1 和极2损耗实测值与参考值的对比。
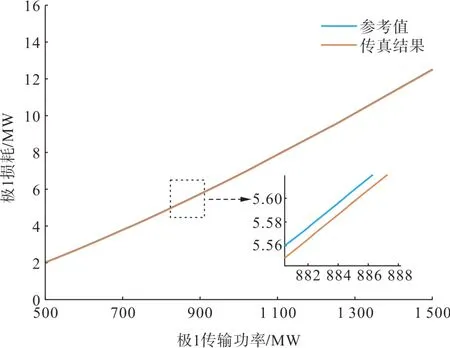
图9 仿真模型损耗值随传输功率变化曲线Fig. 9 Simulation model loss value versus transmission power
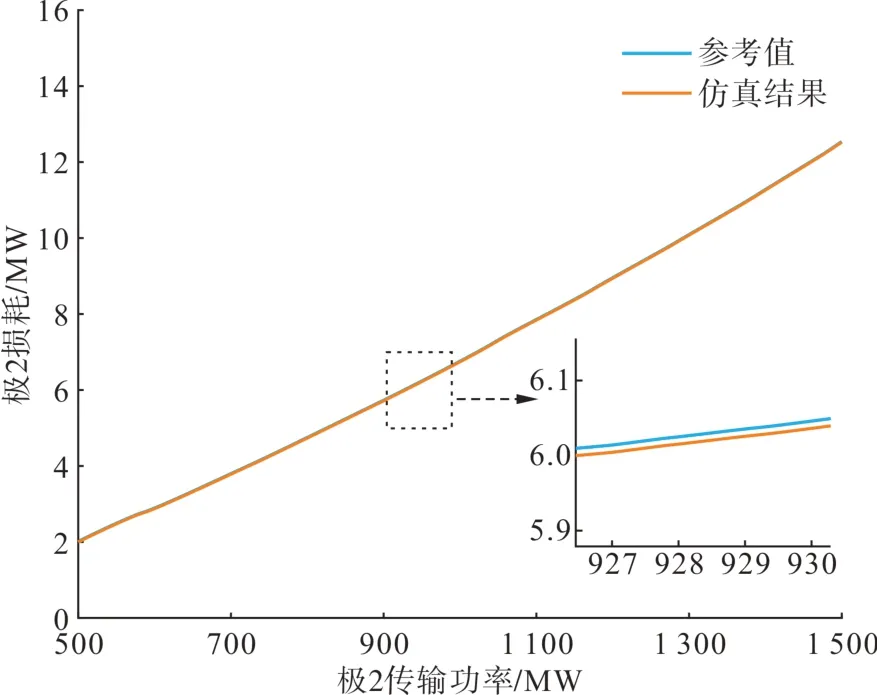
图10 仿真模型极2损耗随传输功率变化曲线Fig. 10 Simulation model pole 2 loss versus transmission power
由图9—10 可知,当系统的传输功率变化时,两极的损耗实测值均能够动态跟踪损耗计算参考值,实现换流站双极损耗的准确模拟,解决了仿真软件计算过程中产生的虚拟损耗问题。通过电流注入的方法,能够精确考虑柔性直流换流阀的实际损耗。
3.3 动态特性对比分析
1)稳态响应
设置总传输功率为3 000 MW,对比加入电流源后仿真模型损耗值与系统的稳态响应,图11—12对比了极1 与极2 改进电路与原始电路损耗值,图13为柔性直流输电系统的典型物理量对比图。

图11 稳态过程的极1损耗对比图Fig. 11 Comparison diagrams of pole 2 losses for steady state process

图12 稳态过程的极2损耗对比图Fig. 12 Comparison diagrams of pole 2 losses for steady state process
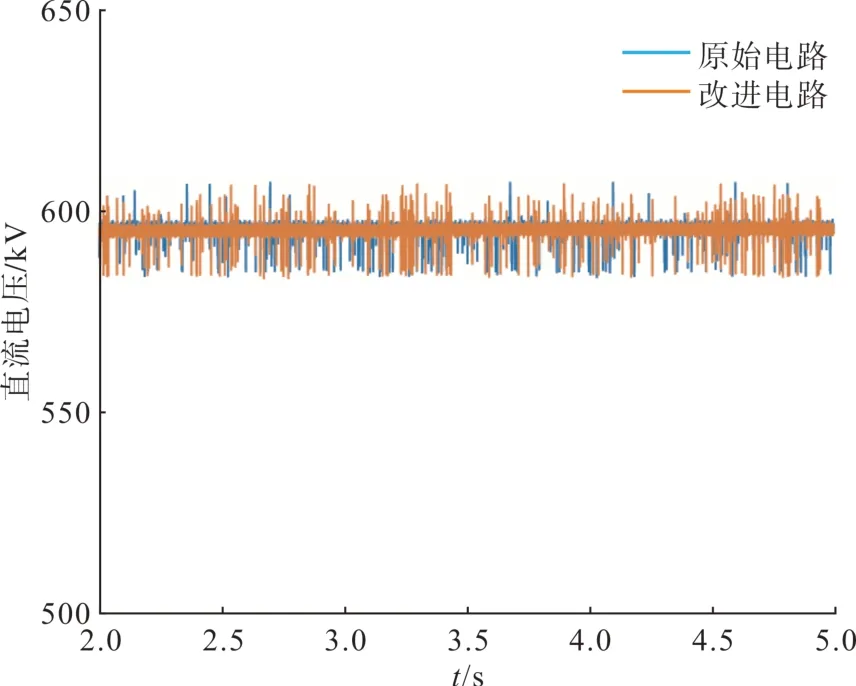
图13 稳态过程的直流电压对比图Fig. 13 Comparison diagrams of DC voltages for steady state process
由图11—13 可知,注入电流后仿真电路实测损耗值与损耗参考值之间的误差大大减小,仿真准确性提高,且直流电压均值依然保持在额定电压600 kV 附近,系统的稳态响应与原始电路保持一致。因此,加入电流源不会影响系统的稳态响应。
2)暂态响应
暂态过程中会出现系统的大幅度震荡,出现尖峰电流和尖峰电压,造成损耗计算偏差,最终导致得到的注入电流源数值较大,对系统稳定性产生影响。因此,需要对电流源的大小做出限制,使得注入电流源数值在暂态过程中保持固定值,待系统达到稳态后,再通过PI控制环节完成对损耗值的动态跟踪。通过在3 s时设置极1侧直流侧短路故障测试加入电流源后系统的暂态响应。图14 为暂态过程的极1 和极2 的换流阀损耗测试结果,图15 为暂态过程的直流电压比较结果。

图14 暂态过程的极1和极2损耗Fig. 14 Pole 1 and pole 2 losses for transient process

图15 暂态过程的直流电压对比Fig. 15 Comparison diagram of DC voltage for transient process
由图14 可知发生故障后由于暂态过程中出现了尖峰电流因而功率计算出现偏差,此时不要求注入电流跟踪损耗参考值,避免暂态过程进一步延长。经过短暂的震荡后系统恢复稳定,注入电流值快速响应,最终能够使得换流阀损耗恢复到设定的参考值。
由图15 的直流电压对比结果可知,在发生故障到恢复稳态的过程中使用注入电流的仿真模型能够保证暂态响应的准确性,说明本文提出的基于电流注入法的含阀体损耗的柔性直流电磁暂态模型能够较好地还原系统的暂态响应,保证故障情况下仿真的可信度。
4 结语
本文针对柔性直流输电工程中存在的换流器阀体损耗仿真不准确的问题提出了基于电流注入法的模块化多电平换流器损耗模型。通过对换流器阀体的损耗来源进行分析,使用有限采样法分析换流阀体的实际损耗。基于本文提出的方法可以编写损耗计算程序实现换流器阀体损耗的主动计算,并易于扫描形成全运行工况损耗曲线。本文通过搭建仿真模型在双端MMC-HVDC 模型中注入电流以实现损耗的动态跟踪,并设计仿真实验验证了本文提出的模型,在准确模拟换流器阀体损耗的同时能够保证系统稳态特性与暂态特性的准确性。本文提出的仿真模型精确考虑了换流器阀体损耗,可为含阀体损耗的柔性直流精细化建模和进一步研究降损措施提供参考。
猜你喜欢
电工技术学报(2023年16期)2023-08-30
电子制作(2019年11期)2019-07-04
化肥设计(2019年3期)2019-07-02
汽车与驾驶维修(维修版)(2018年9期)2018-11-15
中国实用神经疾病杂志(2018年9期)2018-05-25
汽车与驾驶维修(维修版)(2017年12期)2018-01-15
汽车与驾驶维修(维修版)(2017年6期)2017-09-03
通信电源技术(2016年5期)2016-03-22
中国学术期刊文摘(2016年2期)2016-02-13
电气传动(2015年4期)2015-07-11
