
无功功率控制在光伏发电并网中的应用
2024-03-25 06:12王卓,邹俊,谭建
通信电源技术 2024年1期
王 卓,邹 俊,谭 建
(中机国际工程设计研究院有限责任公司,湖南 长沙 410000)
0 引 言
在全球对清洁能源的需求持续增长的背景下,光伏发电系统作为一种可再生能源技术,被广泛应用于能源领域。然而,光伏发电系统的并网连接是实现可持续能源供应的关键步骤之一。在光伏发电系统并网时,无功功率控制是不可或缺的环节。其目标是通过调整光伏发电系统的无功功率来稳定电网的电压和频率,以确保电力系统的稳定运行。电压-无功(Voltage-Reactive Power,V-Q)控制算法是一种常用的控制策略[1-2]。文章重点介绍V-Q控制算法的原理、工作步骤、控制器的选择以及实现方式等内容。V-Q控制算法以电网的电压和频率信号为基础,根据电网需求动态调整光伏发电系统的无功功率输出。在选择和实现V-Q 控制器时,需要考虑多个因素,如控制器的可靠性、响应速度和稳定性。文章以我国西北某光伏发电场为例,对算法进行评估,验证算法在光伏发电系统并网中的有效性和可行性。
1 应用案例分析
1.1 背景介绍
我国西北地区光照充足、风速较高,因此光伏发电在该地区得到广泛的推广和应用。某光伏发电场位于我国西北地区的宽阔平原上,占地面积大,年均太阳辐射量丰沛。该光伏发电场装备了大量光伏组件,能够将太阳能转换为电能,生产并供应清洁能源。该光伏发电场的基本情况如表1 所示。

表1 光伏发电场的基本情况
在该光伏发电场与电网并网过程中,确保光伏发电系统与电网的稳定连接尤为重要。因此,无功功率控制的应用对于该发电场具有重要意义。
1.2 算法应用
晴朗的天气和充足的阳光资源为光伏发电提供了巨大潜力。由于光伏发电系统具有随机性,电网也会发生动态变化,光伏发电场可能会产生较强的无功功率波动。这不仅会影响电网的电压和频率稳定性,还可能导致电网运行不稳定。为解决这些问题,文章引入改进的V-Q 控制算法,以提高系统的灵敏度,防止振荡和过调节,并降低谐波水平[3]。通过实施该控制算法,可以更准确地调节光伏发电场的无功功率,使其更好地适应电网对无功功率调节的需求,从而确保光伏发电系统与电网的稳定连接。
2 无功功率控制算法
2.1 V-Q 控制算法原理
V-Q 控制算法是一种常用的无功功率控制方法,即根据电网电压变化的偏差来调整光伏发电系统的无功功率输出,以确保电网的稳定运行[4]。
第一步,监测电网电压。通过传感器或监测设备实时采集电网的电压数据,并进行监测和记录。
第二步,设定电压目标值。根据电网的额定电压和容许范围、电网运行要求和负载情况,设定合理的电压目标值。
第三步,计算电压偏差。比较实际电网电压与设定的电压目标值,计算出电压偏差,即
式中:EV表示电压偏差;UA表示电网实际电压;UT表示电压目标值。
第四步,调整无功功率输出。根据电压偏差的方向和大小,调整光伏发电系统的无功功率输出。当电压偏差为正时,表示电网电压高于目标值,此时需要增加无功功率来吸收电网的无功功率;当电压偏差为负时,表示电网电压低于目标值,此时需要减少无功功率来注入电网的无功功率。
第五步,控制策略和调节方法。根据电压偏差的变化情况,采用控制器来调节光伏发电系统的无功功率输出。控制器会根据电压偏差的大小和变化速度来调节系统的无功功率输出,并根据反馈信号实时更新无功功率输出值,使其逐渐接近设定的目标值。
2.2 控制器选择和实现方式
2.2.1 PID 控制器
在考虑该光伏发电场的实际情况后,选择使用比例-积分-微分(Proportion-Integration-Differentiation,PID)控制器控制V-Q[5-6]。PID 控制器是一种常用的无功功率控制器,通过实施比例、积分和微分调节,实现对电压偏差的精确控制,并确保迅速响应,从而实现对无功功率的稳定控制。PID 控制器的输出计算公式为
式中:Kp、Ki和Kd分别表示比例系数、积分系数和微分系数;e(t)表示当前时刻的误差(偏差),即期望值与实际值之间的差异;表示误差的积分,即误差的累积量;表示误差的导数,即误差变化的速率。
2.2.2 算法改进
电力系统受负载变化、传输线路等因素的影响,可能出现频繁的振荡和过调节现象,导致电力系统运行不稳定,产生损耗,甚至可能造成系统崩溃。为确保电力系统的稳定性,并防止出现振荡和过调节等现象,采用自适应PID 控制算法。
自适应PID 控制算法通过监测电力系统的动态特性和输出响应,实时调整PID 参数,以适应系统的变化。具体而言,自适应PID 控制算法可以根据当前的误差和参考模型的输出来更新PID 参数。通过反复迭代更新PID 参数,动态调整控制器的增益,从而实现更好的控制性能。
第一步,计算当前误差e(t),即
式中:r(t)为参考模型的输出;y(t)为实际输出。
第二步,根据误差计算适应法则,即
式中:Δθ(t)为参数的修正量;Γ为适应率增益;f(t)为状态变量,可以是输入、输出或其他相关信息。
第三步,更新PID 参数,即
式中:θ(t)为PID 参数,包括Kp、Ki和Kd。
3 实际应用案例
3.1 应用V-Q 控制
在光伏发电场/电站中,V-Q 控制是一种常用的控制策略,主要用于调整光伏系统的功率因数和电压。V-Q 控制的主要目标是调节光伏逆变器的无功功率输出,以确保电网的稳定性。其可以根据电网的需求来调整光伏系统的无功功率输出,以保持所需的功率因数水平。例如,在低负荷时,光伏系统可以向电网提供无功功率,以提高功率因数;在高负荷时,光伏系统可以吸收电网的无功功率,以降低功率因数。根据电网要求和系统设计标准,设置所需的功率因数范围,即0.9 ~0.95。
为实现V-Q 控制,该光伏发电场采用自适应PID 算法来控制光伏逆变器。通过传感器监测电网状态,并根据需求调整无功功率输出。根据电网要求和系统设计标准,设置所需的电压调节范围,即380 ~420 V。V-Q 控制原理如图1 所示。
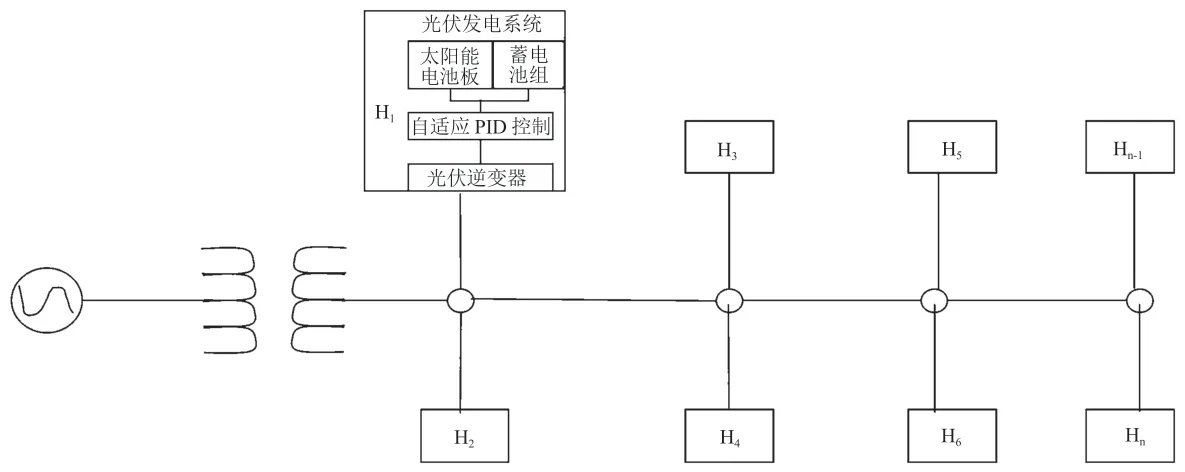
图1 V-Q 控制算法原理
3.2 应用效果与反馈
V-Q 控制通常根据实际的功率因数要求来调整光伏系统的无功功率输出。通过监测电网的功率因数和光伏系统的无功功率输出,可以评估控制策略的有效性。如果功率因数未达到要求,则需要调整控制算法或相关参数。
在项目中,根据实时数据和实际运行情况对V-Q控制进行优化和调整。同时,监测系统的性能和响应,并根据实际需求和电力标准对控制策略进行评估和验证。文章利用传感器监测了该变电站一天的电压变化范围,并利用电压反馈,通过自适应PID 算法对功率输出进行精确控制。V-Q 控制优化结果如图2所示。
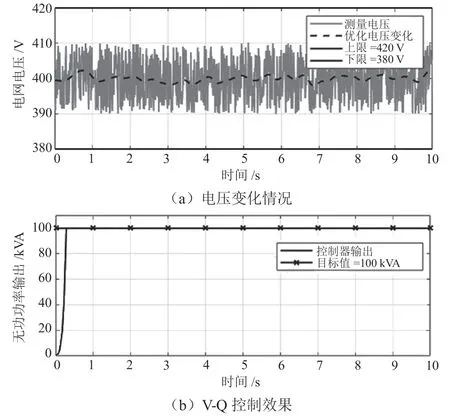
图2 V-Q 控制优化结果
由于光伏发电的不可控性和间断性,光伏系统的电压可能会产生较大波动,导致电网功率不平衡。在V-Q 控制算法中,自适应PID 控制器可以根据电网的功率需求快速调整光伏系统的无功功率输出,有效平衡电网功率,从而降低对电网的影响。
4 结 论
文章探讨了V-Q 控制算法和自适应PID 控制器在光伏发电并网中的应用,旨在为光伏发电并网中的无功功率控制提供有益的指导和参考。同时,通过案例分析发现,自适应PID 控制器能够快速响应并调整无功功率输出,以更好地满足设定的目标值。通过动态调整PID 参数,能够根据实际情况自适应地调节控制效果,从而确保光伏发电场更加高效稳定的运行。光伏发电场具有巨大潜力,在光伏发电场中应用PID 控制器可以提高系统的效率和稳定性。
猜你喜欢
电子产品世界(2021年5期)2021-02-09
中国工程咨询(2019年9期)2019-01-27
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
石油化工应用(2016年12期)2016-04-07
通信电源技术(2016年5期)2016-03-22
中国工程咨询(2016年12期)2016-01-29
电测与仪表(2015年7期)2015-04-09
电测与仪表(2014年14期)2014-04-04
浙江中西医结合杂志(2013年4期)2013-11-08
