
基于PMU 的特高压直流输电系统孤岛运行控制方法
2024-03-25 06:12郭星
通信电源技术 2024年1期
郭 星
(国网山西省电力公司,山西 太原 030021)
0 引 言
特高压(Ultra-High Voltage,UHV)直流输电系统孤岛运行具有很多问题。首先是电压稳定性差,在孤岛运行时,由于电源的隔离,系统电压会下降,甚至可能导致电压崩溃。其次是具体的频率波动相对较大,这是由于孤岛内的发电机组在负荷变化的作用下,会出现相应的波动[1-2]。最后是难以控制负荷,最直接的表现就是一些重要负荷可能无法得到有效控制。这些运行问题导致特高压直流输电系统孤岛运行存在较大的安全隐患[3-4]。针对这一问题,以通信系统为基础的安全保障措施成为特高压直流输电系统孤岛运行阶段较为主要的辅助,但是也对其产生了较强的依赖性。为有效控制孤岛运行,需要建立一个独立、高效的通信系统[5]。结合上述分析结果,在控制特高压直流输电系统孤岛运行时,必须严格控制输入功率和输出功率,以确保系统的稳定性,同时要保证自动发电控制(Automatic Generation Control,AGC)和自动电压控制(Automatic Voltage Control,AVC)的正常运行,以维持孤岛稳定[6]。在此基础上,文章提出基于电源管理单元(Power Management Unit,PMU)的特高压直流输电系统孤岛运行控制方法,并设计对比测试环境,分析验证所设计控制方法的有效性。
1 特高压直流输电系统孤岛运行控制方法设计
1.1 特高压直流输电系统孤岛运行有功-相角下垂控制
对于处于孤岛运行状态的特高压直流输电系统而言,相角差决定了分布式发电装置(Distributed Generation,DG)的有功出力情况,结合这一特征,文章设置相角作为下垂量,以此实现更加直接的控制。特高压直流输电系统孤岛运行的有功-相角下垂控制设计过程中,保持系统频率始终稳定在额定值的方式是将逆变器输出电压的相角作为下垂量,考虑输出电压的角度会受电压源换流器(Voltage Sourced Converters,VSC)的影响发生瞬时改变,借助文章提出的有功-相角下垂控制,为最终的控制效果提供保障。文章设计的具体特高压直流输电系统的孤岛运行有功-相角下垂关联公式可以表示为
式中:δre表示DG 的相角参考值;Ure表示DG 的电压参考值;δ0表示DG 处于空载状态下的相角参考值;U0表示DG 处于空载状态下的电压参考值;mi表示DG 的有功下垂系数;ni表示DG 的无功下垂系数;pi表示DG 输出的有功功率参数;qi表示DG 输出的无功功率参数。
逆变器通过微型PMU 的同步信号,确定派克变换的参考坐标系。将特高压直流输电系统孤岛运行阶段的目标维持频率作为控制基准,即可得到对应的电压在派克变换参考坐标系中的控制参数,其可以表示为
式中:Udre和Uqre分别表示电压在派克变换参考坐标系中不同维度上的控制参数。
1.2 特高压直流输电系统孤岛运行有功补偿控制
从有功补偿的角度对处于孤岛运行状态的特高压直流输电系统的特性进行分析,实现精确分配有功的前提是调整特高压直流输电系统中所有DG 的相角参考值处于一致状态。文章设计的有功补偿控制方法可以表示为
式中:δ're表示PI 控制器输出的实际相角参数;Kp表示特高压直流输电系统中DG 的PI 控制器比例系数;Ki表示特高压直流输电系统中DG 的比例、积分(Proportion Integral,PI)控制器系数;δL表示微型PMU 测得的公共母线电压相角参数。在此基础上,当DG 输出的有功功率超出期望输出有功功率时,结合式(1)可判定此时DG 的相角参考值处于偏小的状态,对应PI 控制器输出的实际相角参数δ're也随之减小,以保障DG 输出的功率相应减小。同理,当DG 输出的有功功率低于期望输出有功功率时,结合式(1)可判定此时DG 的相角参考值处于偏大的状态,对应PI 控制器输出的实际相角参数δ're也随之增大,以保障DG 输出的功率相应增大。
2 应用测试
2.1 测试环境构建
为验证文章设计的基于PMU 的特高压直流输电系统孤岛运行控制方法的应用效果,文章在仿真环境中构建了一个特高压直流输电系统。在具体的构成上,其主要包括以下几个主要组成部分。
一是输电线路,使用具有高电压等级的输电线路,具体为±1 100 kV 等级,以此满足较远距离的高效电力传输需求。
二是换流站,将交流电转换为直流电或将直流电转换为交流电。在文章设计的特高压直流输电系统中,换流站的主要设备包括换流阀、换流变压器、滤波器。
三是控制系统,作为特高压直流输电系统的核心部分,利用控制系统负责整个系统的调度、控制和监测。文章设计控制系统包括能量管理系统、数据采集与监视控制系统、安全控制系统。
四是通信系统,为实现控制和监视,文章设计了一个通信系统,并覆盖整个输电线路和换流站,以便实现数据的采集和传输。
在进行具体的孤岛运行控制性能分析时,为了能够更加客观地对文章设计方法的控制效果进行分析,分别设置文献[3]提出的以混合储能为基础的直流微电网孤岛运行控制方法、文献[4]提出的以多智能体协同为基础的孤岛运行控制方法作为测试的对照组,与文章设计方法进行对比分析。
2.2 测试结果与分析
在分析3 种方法的控制效果时,文章将测试特高压直流输电系统孤岛运行阶段的环流作为具体的评价指标,得到的具体测试结果如图1 所示。
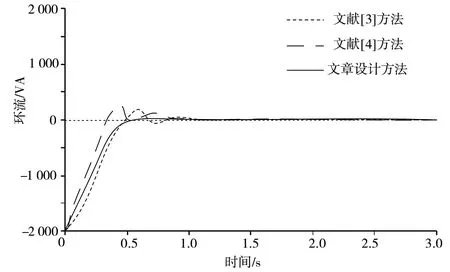
图1 不同方法的控制效果对比
结合图1 所示的测试结果,对3 种不同控制方法的应用效果进行分析。其中,在混合储能直流微电网孤岛运行控制方法下,测试特高压直流输电系统孤岛运行阶段的环流在达到0 值后,分别在其上下出现了2 次跃迁,对应的幅度相对较小,最终环流稳定在0 状态的时间为1.0 s。在多智能体协同直流微电网孤岛运行的控制方法下,测试特高压直流输电系统孤岛运行阶段的环流达到0 值后,出现了一次较大幅度的跃迁和一次较小幅度的跃迁,具体分别为320.0 VA和75.0 VA,最终达到稳态的时间与混合储能直流微电网孤岛运行控制方法基本一致。相比之下,在文章设计方法的测试结果中,测试特高压直流输电系统孤岛运行阶段的环流达到0值后出现了小幅度偏离情况,但是具体的偏离程度稳定在10.0 VA 以内,并在测试后的0.8 s 内达到0 稳态。由此可知,文章设计的基于PMU 的特高压直流输电系统孤岛运行控制方法可以实现对直流输电系统孤岛运行稳态的有效控制,具有良好的实际应用价值。
3 结 论
文章提出基于PMU 的特高压直流输电系统孤岛运行控制方法研究,在充分考虑了特高压直流输电系统孤岛运行特性的基础上,从控制要点的角度入手,利用PMU 在实时监测发电机的功角、负荷电压的幅值以及相角方面的优越性,切实实现了对特高压直流输电系统孤岛运行的有效控制,大大提高了系统运行的稳定性。借助文章对于特高压直流输电系统孤岛运行控制的研究与设计,希望能够为实际的输电系统孤岛运行管理工作提供有价值的参考。
猜你喜欢
电工技术学报(2021年9期)2021-05-12
新世纪智能(语文备考)(2020年9期)2020-12-31
新高考(英语进阶)(2018年1期)2018-04-18
电子制作(2018年1期)2018-04-04
创新作文(小学版)(2017年33期)2017-04-04
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年6期)2016-04-11
通信电源技术(2016年3期)2016-03-26
现代企业(2015年6期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年2期)2014-11-12
