
用于人体运动监测的双层柔性应变传感器
2024-03-23 07:31:06朱雅倩汪鹏飞李育文刘彩霞
传感器与微系统 2024年3期
朱雅倩,汪鹏飞,李育文,黄 英,刘彩霞
(合肥工业大学微电子学院,安徽 合肥 230601)
0 引 言
近年来,随着人工智能(artificial intelligence,AI)的发展,人类对基于柔性应变传感器的智能可穿戴设备的需求也随之增长。柔性应变传感器因其价格低廉、制作工艺简单,结构简单、灵敏度高等特点受到大量学者的广泛关注[1~3]。文献[4]采用酸化碳纳米管(acidized carbon nanotubes,a-CNTs)、水性聚氨酯(waterborne polyurethane,WPU)和泡沫制备了高灵敏度、宽应变范围和良好稳定性能的应变感应功能织物。该传感器应变范围为0%~60%,最大灵敏度系数(gauge factor,GF)为55.2;文献[5]使用银纳米线旋涂至聚酰亚胺(polyimide,PI)表面,制作出一种灵敏度高且工艺简单的传感器,但其工作范围只有5%。
高灵敏度和宽工作范围是衡量柔性应变传感器性能好坏的2个重要参数,对传感器的应用具有重要意义。例如,监测人类脉搏、心跳等生理活动引起的微小应变时需要传感器具有高灵敏度系数[6,7],实时监测手指关节和膝关节运动时,则需要拉伸范围超过50 %的柔性应变传感器[8~10]。然而从现阶段的大多数研究结果可以看出,高灵敏度和高拉伸性这两种性能很难在一种柔性应变传感器中平衡存在[11]。传感器如果需要同时具备高灵敏度、高拉伸性和高稳定性等性能,则需要引进更加先进的技术和制备方法,对目前传感器研究领域来说这是一个巨大的挑战。
基于目前柔性应变传感器所存在的问题,本文中提出了一种基于双层导电层结构的柔性应变传感器。选取环保性、稳定性和机械性能优异的WPU[12]为基底,具备高导电性的石墨烯[13]和低成本的炭黑为导电填料。通过使用逐层(layer by layer,LBL)组装技术和激光钢网模具在传感器表层制造出规则裂纹结构实现具有高灵敏度和宽工作范围的柔性应变传感器。
基于该传感器设计了一种智能可穿戴美国手语(American sign language,ASL)解释系统,同时也对人类面部情绪识别进行了研究。研究结果表明,传感器的这种高度的综合性能使其在运动检测、人体健康监测、柔性机器人皮肤等方面具有广阔的应用前景。
1 柔性传感单元研制
1.1 实验材料
本文所使用的炭黑(carbon black,CB)-3100 由SPC 化学公司提供,溴化十六烷基三甲铵(cetyl trimethyl ammonium bromide,CTAB)表面积为110 m2/g,灰分含量为1%,平均粒径约为30 nm;石墨烯(graphene,GR)由成都有机化工有限公司提供,纯度>99.50%质量分数,直径5~10 μm,厚度4~20 nm。WPU-1926由深圳吉田化工有限公司提供;无水乙醇(ACS,纯度>99.50%)由阿拉丁工业公司提供。
1.2 传感器制备
传感器制备流程与制备样品结果如图1 所示,主要可分为以下4个步骤:1)在室温下,将0.06 g CB 混入10 mL的无水乙醇中,混合超声1 h,再磁力搅拌1 h,称取1.94 g WPU倒入烧杯中磁力搅拌4 h,制得CB/WPU高电阻浆料。将0.15 g GR倒入10 mL的无水乙醇中,混合超声1 h后,再磁力搅拌1 h,称取0.28 g WPU倒入烧杯中磁力搅拌4 h,制得GR/WPU低电阻浆料。2)将CB/WPU 低电阻浆料浇注置底部附着硅胶皮的激光钢网模具中,使用刮板按相同的方向刮涂,并在60 ℃干燥30 min。固化后将GR/WPU 高电阻浆料通过激光钢网模涂覆在CB/WPU膜上,随后抽真空处理30 min并在60 ℃下干燥1 h。3)充分干燥后,切割样品(尺寸20 mm×5 mm),为确保有完整的裂纹,向样品的两端施加2%的应变,以形成均匀的裂纹。4)在每个样品两端涂覆导电银胶并在两端引出导电银布用作传感器电极。待导电银胶固化后,将聚二甲基硅氧烷(polydimethylsiloxane,PDMS)预聚液均匀的涂覆在样品表层,作为传感器的封装层。随后将其置于真空干燥箱60 ℃干燥2 h,固化后制得传感器。
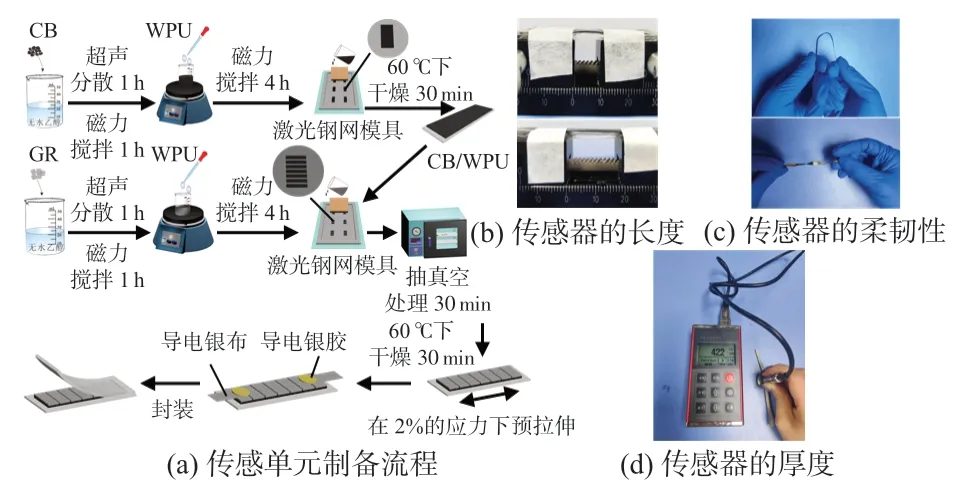
图1 传感器制备流程与制备样品结果
从图1(b)中可以看出,该传感器的拉伸长度可由初始的10 mm拉伸到20 mm,拉伸应变达100%。图1(c)为扭转和弯曲状态下的传感器,表明该传感器具有良好的拉伸性。图1(d)显示传感器的厚度为422 μm。
1.3 导电填料比例对传感器性能的影响
导电粒子的形貌和结构是决定复合材料的导电性的重要因素。图2为不同质量分数的GR对GR/WPU层的性能影响,图2(a)中插图显示GR/WPU层体积电阻率随着导电填料的变化曲线图,随着导电填料的增加,体积电阻率呈现逐渐下降的趋势。综合考虑GR/WPU层薄膜的导电性、拉伸性和表层规则裂纹制备的可行性,GR的质量分数选定为35%。图2(b)为不同质量分数CB对柔性应变传感器的特性影响,确定GR/WPU 层GR 的质量分数为35 %的前提下,综合考虑CB/WPU导电薄膜不仅要具备高拉伸性能还需要导电性,故CB/WPU 层导电填料的质量分数选定为3%。
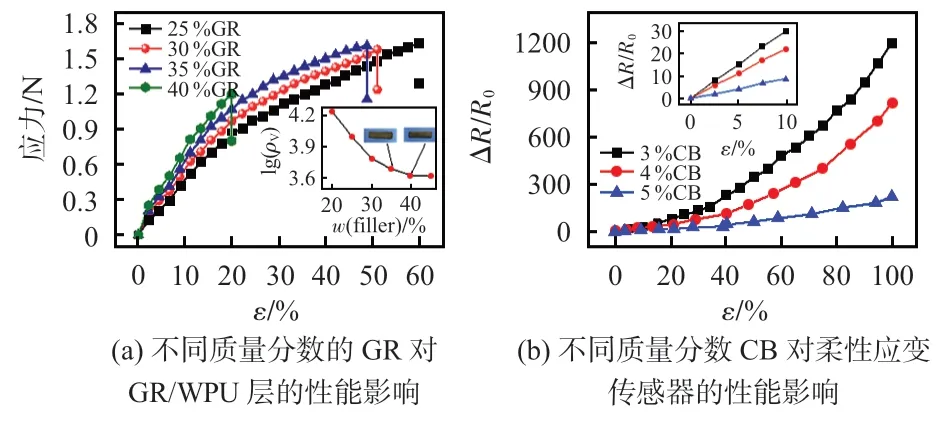
图2 传感器最佳导电填料配比
2 实验结果
2.1 传感器的微观表征
图3 为柔性应变传感器的表面形貌扫描电子显微镜(scanning electron microscope,SEM)图。图3(a)为该传感器的GR/WPU层在不同放大倍数下的SEM图。图3(b)为基于双层导电结构的柔性应变传感器的横截面SEM 图,图中可以清晰看到双层导电结构。图3(c)为传感器表面的规则裂纹结构的SEM图。如图3(c)所示,2 个裂缝之间的间距约为0.85 mm。
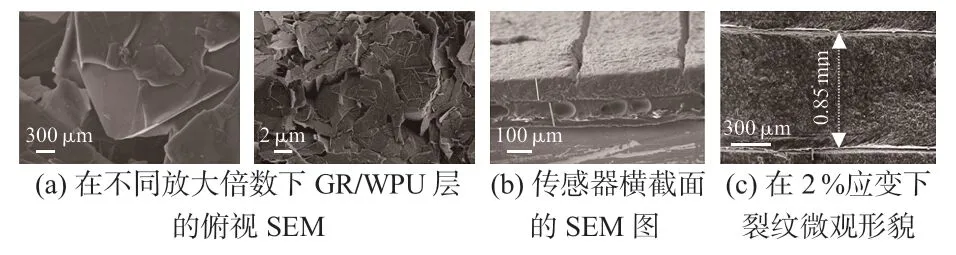
图3 传感器表面形貌SEM图
2.2 传感器的机理与仿真
假设R1和R0分别是GR/WPU 层和CB/WPU 层的初始电阻,L为传感器的初始长度。在初始状态下传感器的初始电阻为R1=R0。其中,n为裂纹数,ε为应变,ΔR为下层裂纹下各部分电阻的变化量。
产生应变时传感器的电阻可表示为
灵敏度系数公式表达为
将式(1)代入式(2),即
由电阻率公式可得R=ρL/S,将其代入式(3),即
式中ρ1,ρ2(假设ρ1和ρ2不变)分别为GR/WPU层和CB/WPU层的初始电阻率。S为该传感器横截面的面积(两者截面积设为相等)。
拉伸前后传感器的导电机理、应力应变仿真示意图及电流密度仿真示意如图4 所示。从图4(a)中可以看出,在初始状态下传感器表面的裂纹缝隙过小可忽略不计,此时传感器的导电路径分布在GR/WPU 层表面。当对其施加外部应力时,传感器表面规则裂纹的缝隙随着外力的增加而扩大,此时传感器的导电路径由GR/WPU层的底部流向CB/WPU层的顶部,再由CB/WPU 层的顶部流向GR/WPU层的顶部,整体沿着“S”形导电路径流动。图4(b)为在施加10 N力时,敏感单元在2%和7%应变下的应力应变模拟图,当施加外力时,应力主要集中在裂纹处。图4(c)为施加2%和7%应力时不同视角的模拟电流密度,GR/WPU层和CB/WPU层的电导率分别设置为1 000 S/m和1 S/m。从图4(c)中可以看出电流主要集中分布于裂缝处。
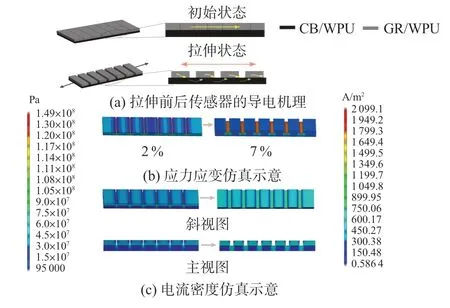
图4 传感器导电机理与有限元仿真
2.3 特性测试与性能分析
传感器特性测试平台如图5 所示,利用电动拉力测验机和直流电阻测验仪测试传感器的动、静态特性。
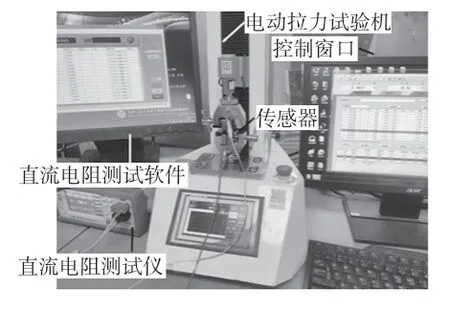
图5 传感器特性测试平台
传感器的动、静态特性测试如图6 所示。图6(a)为基于不同导电层的柔性应变传感器在拉伸过程中相对电阻变化。基于上导电层(GR/WPU)的应变传感器显示出高灵敏度,但仅拉伸到约2%时导电路径断裂,传感器无法工作。而基于下导电层(CB/WPU)在拉伸率超过100%时仍保持良好的导电路径,但GF却小于9。对比下基于双层导电结构的传感器兼具高灵敏度和高拉伸性能。插图为应变传感器在0%~40%应变范围内的灵敏度系数为466,在40%~100%应变范围内的灵敏度系数为1569。图6(b)为传感器在不同频率下做5次加载-卸载循环的重复性测试,数据结果表明,该传感器具有优异的应变随动特性和响应能力。图6(c)中的数据可得传感器的响应时间为86 ms。图6(d)为传感器以5 mm/s 的速度拉伸至40 %的状态下将近1 000次的加载-卸载循环测试。表明该传感器具备良好的循环耐久性和重复性。
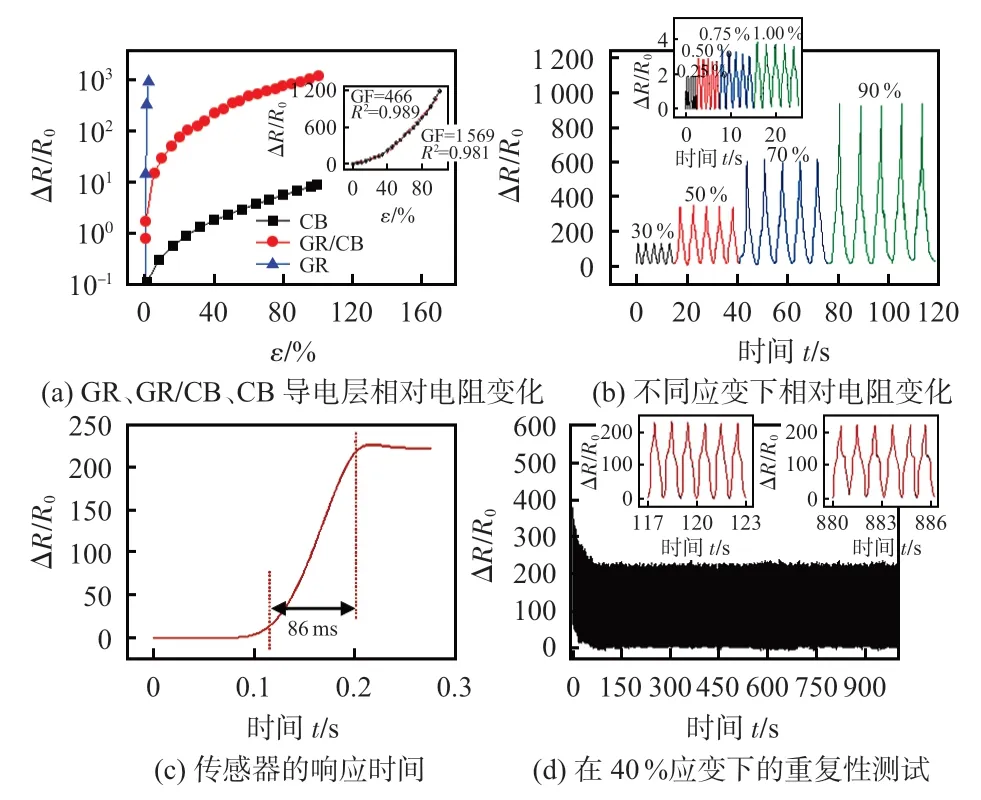
图6 传感器动、静态特性测试结果
为传感器的弯曲特性测试结果,S为20 mm(S为2 个位移台的初始间距),半径的计算公式为:R=S/β。弦长与弯曲角度的关系计算公式为
式中β为弯曲角度(这里使用弯曲角β来定义弯曲程度),d为弦长。
图7(a)为弯曲角度与弦长的关系曲线,图中曲线显示弯曲角度随弦长的减小而增大。图7(b)为硅橡胶基底的弯曲角度逐步阶梯式增加20°时传感器的响应曲线,表明该传感器具有良好的高稳定性。测试结果表明,该传感器能够应用于弯曲角度的检测。

图7 传感器弯曲特性测试
3 应用研究
3.1 ASL识别
手语是听障人士通过非语言进行交流的重要方式,ASL在大多数语言学研究中被选为主要的手势语言。
如图8所示,可穿戴数据手套由5 只独立的应变传感器集成在一只橡胶手套上制成。图8(a)为ASL 字母的几个预定义手势(“C”、“A”、“U”、“S”和“K”),通过信息采集系统传递相应的信号并进行解释(通过手势演示ASL字母,测量每根手指不同弯曲状态下的相对电阻。通过设置拉直、半弯曲和完全弯曲状态的相对电阻,并与相应的字母匹配。如图8(b)所示,通过执行预定义手势,5根手指在不同的弯曲状态产生相应的信号。可穿戴数据手套是一种互动设备在机器人和虚拟现实中有助于精细运动的控制。
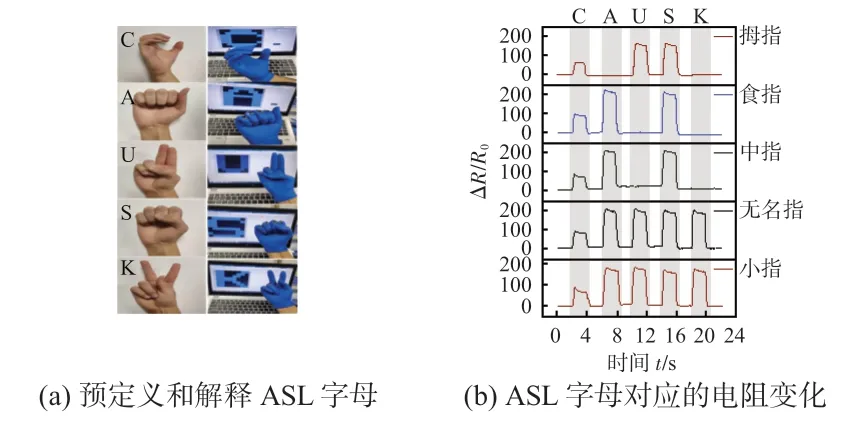
图8 ASL识别
3.2 微表情识别
该传感器还可用于情绪监测,将传感器贴合于受试者的眼角和嘴部附近的皮肤上,用于监测受试者在情感表达期间由于肌肉运动引起的微小应变。图9 为受试者在开心和伤心时不同位置的相对电阻变化。图9(a)为受试者大笑时,眼角处传感器的相对电阻值最高峰值约为2.8,嘴部附近的值约为14,贴合在眼角和嘴部附近皮肤上的传感器的特征值有较大差别。受试者大笑时不同部位的峰值差是肌肉收缩幅度不一致导致的。相较之下,眼角的肌肉仅轻微收缩。图9(b)为受试者哭泣时,连接在眼角和嘴边的传感器的相对电阻变化。眼角处最高峰值几乎为4,靠近嘴部皮肤上的传感器的最高峰值要低于大笑时,约为7。实验结果表明,该传感器具有监测包括眼睑周围、嘴部附近和眼角附近的肌肉在内的眼部肌肉收缩引起的微小应变的能力。在人机交互及虚拟现实等领域有着巨大的应用潜力。

图9 柔性应变传感器的面部情绪识别应用
4 结 论
为了解决高灵敏度和高拉伸性这两种性能难以在一种柔性应变传感器中平衡存在的问题,本文提出了一种基于双层导电结构的柔性应变传感器。研究传感器的导电填料比例、结构与导电机理、动静态和弯曲特性。设计信号采集系统对信号进行实时处理;此外,基于该传感器设计了一种智能可穿戴ASL解释系统,同时也对人类面部情绪识别进行了研究。传感器的高度综合性能使其在运动检测、人体健康监测、柔性机器人皮肤等方面具有广阔的应用前景。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
西部论丛(2019年1期)2019-01-15 12:39:42
电子制作(2017年17期)2017-12-18 06:40:30
大连工业大学学报(2015年4期)2015-12-11 04:06:50
智能建筑电气技术(2015年5期)2015-12-10 05:52:23
航空兵器(2014年2期)2015-03-13 02:42:07
物探化探计算技术(2015年2期)2015-02-28 17:42:53
发明与创新(2015年30期)2015-02-27 10:39:51
