低成本惯性多冗余导航控制一体机设计
2024-03-20 04:31:24牛志朝任磊贺韬崔孟楠
电子技术应用 2024年2期
牛志朝,任磊,贺韬,崔孟楠
(北京航天自动控制研究所,北京 100854)
0 引言
为了实现对室外智能体的稳定运动控制[1],需要对其精确定位和定姿。现阶段,普遍采用惯性/差分卫星组合导航系统进行定位和定姿,文献[2]给出了一种四石英挠性加速度计和四光纤陀螺组成的多传感器冗余捷联惯性导航系统,文献[3]研究了一种多冗余捷联惯组配置优化与应用方案,采用惯性导航信息融合的方法,提升相应测量通道的稳定性和系统使用精度。文献[4]设计了SINS/GPS 组合导航系统方案,并在ARM 平台进行了设计与验证。由于控制理论和计算机技术的发展,采用冗余配置技术提高导航系统的可靠性和精度成为惯性导航技术的发展方向[5-7]。虽然市面上组合导航种类众多,但是普遍集成度低、体积大、价格偏高,不具备导航控制一体化功能,不能满足实际需求。本文设计了一种低成本惯性多冗余导航控制一体机,给出了具体的软硬件设计方法。稳压电源单元、三冗余惯性/差分卫星组合导航定位单元和稳态运控单元的设计,实现了室外移动智能体的导航控制功能。
1 实现方案
惯性多冗余导航控制一体机主要由稳压电源单元、三冗余惯性/差分卫星组合导航定位单元和稳态运控单元构成。系统结构框图如图1 所示。
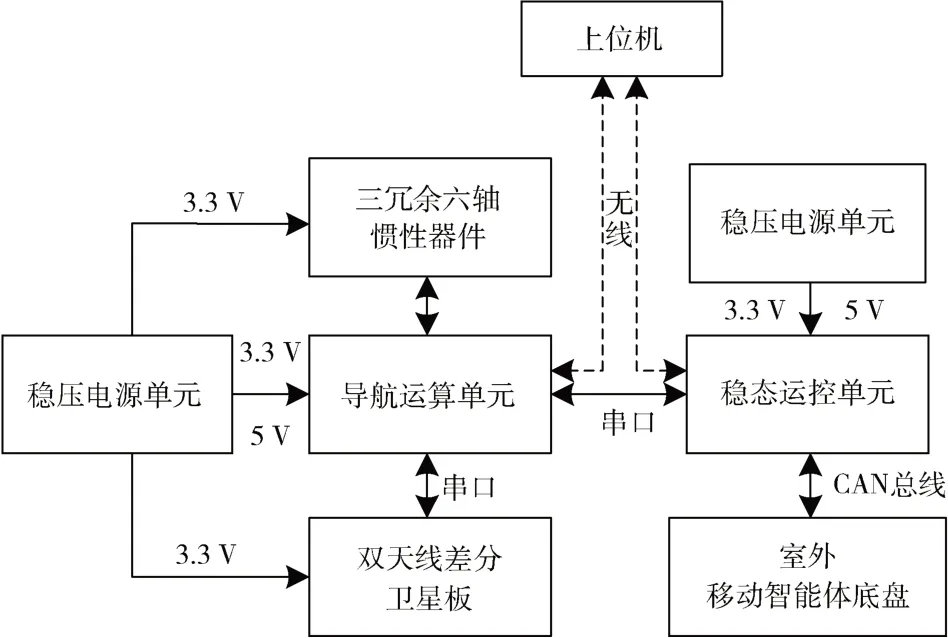
图1 系统功能框图
稳压电源单元的开关电源MP2482DN 和线性电源JW29300U-3.3 为一体机提供稳定5 V 和3.3 V 的较大功率电源,3.3 V 电源纹波电压峰峰不超过50 mV。
导航运算单元选用480 MHz 高性能浮点运算控制器STM32H7,通过SPI 星形拓扑总线结构与3 片六轴惯性芯片BMI088 通信,采集智能体的三轴陀螺角速度和三轴加速度进行导航解算,得到智能体的姿态;2 路串口分别与定位板双向通信,实现智能体的定位和定向。
稳态运控单元采用低功耗控制器STM32F4,通过CAN 总线接口与智能体底盘双向通信,实现运动控制和底盘的状态监测;1 路串口实现与控制器STM32H7 的双向通信,实现智能体的实时路径规划和导航。
导航运算单元和稳态运控单元通过无线网络与上位机连接组成局域网,实现数据交换和状态监测,可以实现工业园区或生活社区的全覆盖。
2 硬件电路设计
2.1 稳压电源单元
稳压电源单元电路主要包括稳压电路和过流保护电路两部分。稳压电路主要是获得稳定的输出电压。过流保护电路主要是限制用电电路的超负载使用,避免线性电源芯片因过热造成损坏。
稳压电路部分LDO 电源的电流输出能力为3 A,能够满足多负载的需求。
过流保护是电路设计中的很重要的部分,当负载发生重大变化时,可以将电源的输出功率限制在额定范围内,防止稳压电路长时间过载使用,烧毁电路。
过流保护的具体电路如图2 所示。
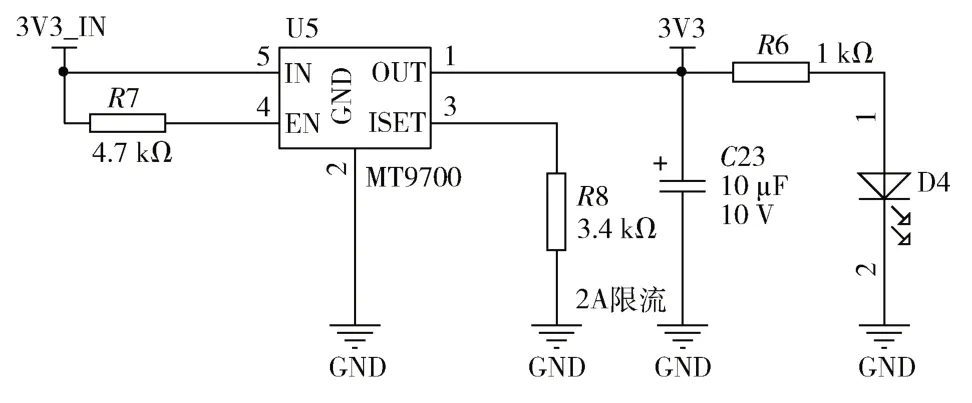
图2 过流保护电路
上述电路中的MT9700 可以将3.3 V 的电源输出限定在2 A 范围,实际设计过程中可根据负载需求,调整设计,符合降额设计要求即可。
2.2 导航运算单元
为了提高系统导肮精度,选用三冗余惯性测量芯片BMI088[8],为了降低系统的复杂度,通过SPI 星形拓扑总线结构与运算控制器STM32H7 进行通信,保证了实时性和一致性,避免了单一低成本微机械惯性测量元件带来的精度降低和偶发失效造成导航失败。BMI088 星形拓扑总线连接如图3 所示。BMI088 参数表如表1 所示。

表1 BMI088 参数表

图3 BMI088 SPI 星形拓扑总线连接(单片示意)
差分卫星流动站电路如图4 所示,图4 电路中的2 路串口分别与定位板双向通信,实现智能体的定位和定向。差分卫星板选用双天线UB482。
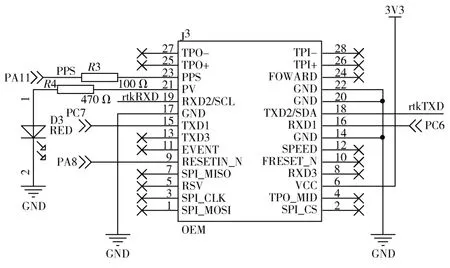
图4 差分卫星流动站电路
2.3 稳态运控单元
2.3.1 底盘控制接口
CAN 总线接口与智能体底盘双向通信,实现运动控制。一体机通过不同的节点下发控制指令,并接收底盘上报速度和运行状态信息。CAN 总线控制接口如图5 所示。

图5 CAN 总线控制接口
2.3.2 TTL 串行通信接口
为了良好的通信可靠性,稳态运控单元和导航运算单元采用板间电缆的方式连接。同时,为了产品小型化节约空间,板间采用柔性扁平线缆接口,实现了产品的可操作性。
2.3.3 以太网通信接口
以太网通信接口选用PHY 网络芯片LAN8720Ai 和网络变压器TG110-E050N5 实现网络资源的电平转换,实现网络收发控制。因RMII 总线在同等传输效果情况下比MII 占用接口更少,因此本文采用RMII 方式。
为了实现产品冗余导航和稳态控制功能的快速集成和拆分,一体机的结构采用层叠可分离式结构。为实现上位机与一体机的功能搭配,在导航运算单元和稳态运控单元电路中均设计以太网通信接口,既满足模块化的需求,又为产品的可靠通信做了备份,可谓是一举多得。
3 软件设计
惯性多冗余导航控制一体机软件包括多冗余惯性数据读取与融合、惯性差分卫星组合解算、定位导航输出、导引控制计算、遥控数据处理、控制指令生成与输出、智能体状态监测等,实现室外智能体的导航控制功能。软件工作流程如图6 所示。
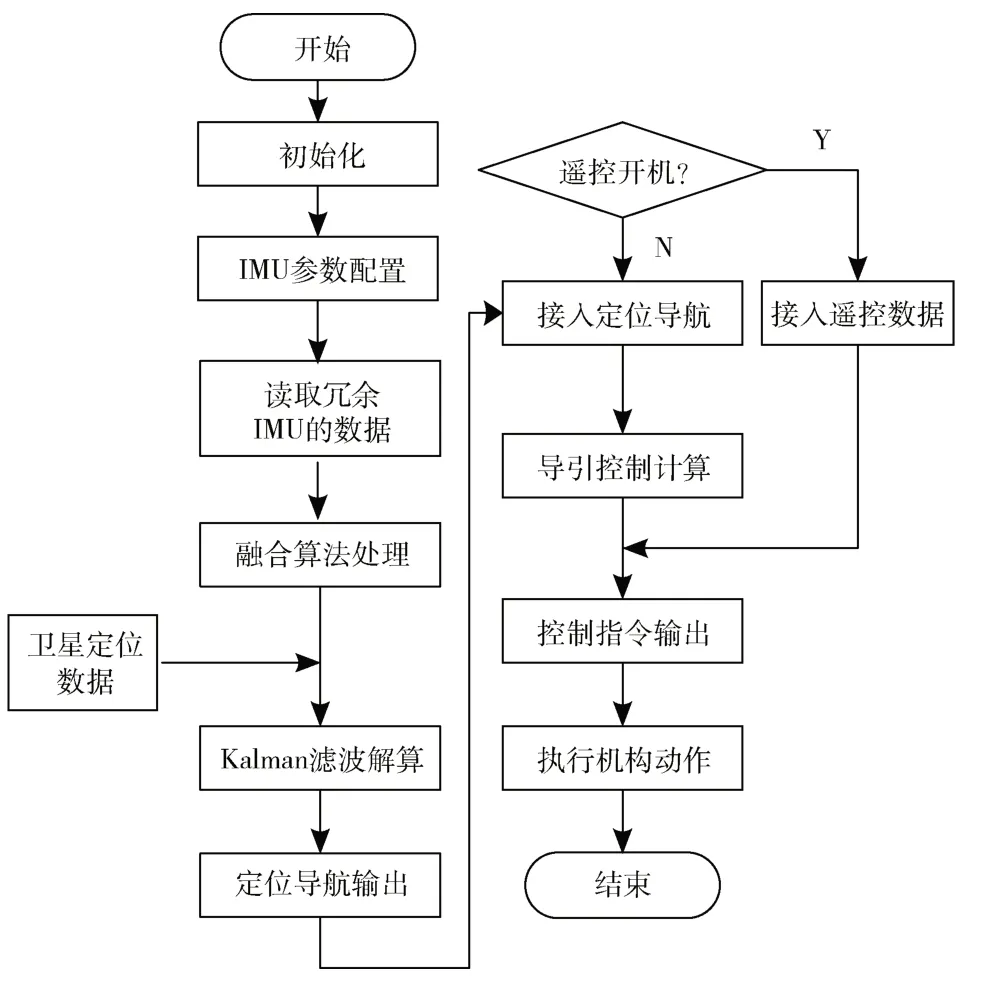
图6 软件工作流程图
智能体从传感器端感受外界信息,传感器性能的精度和稳定性对智能体动作的正确性影响很大,所以得到传感器的误差模型,并将固有误差补偿后再输入到智能体是实现其高精度导航控制的重要环节,因此需要引入对惯性传感器的标定[9]。
3.1 IMU 标定
3.1.1 加速计刻度因数及零偏标定
加速度计的误差模型A=SU+B,其中,UT=[uaxuayuaz]为加速度计的测量值,AT=[axayaz]为加速度计校准后各轴的值,S、B分别为加速度计比例因子和零偏。
利用多位置构造估计方程:
则最小二乘解为:
因此IMU 加速度计的刻度因数和零偏为:
3.1.2 陀螺仪零偏标定
陀螺仪零偏标定在静止状态下采集各个轴的输出,并对测量值取均值从而获取零偏值。
3.2 IMU 陀螺冗余输出[11]
陀螺仪测量模型如式(10)所示:
式中,ωm为陀螺仪的测量值,Iω为真实的角速率,bg为陀螺仪的零偏,ng为测量高斯白噪声,且:
3.3 导引控制设计
智能体的导引控制采用比例导引控制方法[12,13],根据智能体与目标点位的方位差信息作为稳态控制单元的输入,在综合调度中心的监视和配合下,结合避障传感器的信息,进行智能体的减速和躲避处理。
为避免打滑产生危险,在爬坡过程中提取坡面的角度[14-15],采用防滑爬坡的控制方法,实现智能体的导引稳态控制。
4 试验验证
在46 m×22 m 的区域内进行智能体的导航控制试验,智能体能够按照调度中心的指令进行轨迹跟踪控制,控制精度较好,位置误差在0.1 m 内,只在卫星受到部分遮挡的情况下,位置精度控制在0.3 m 内,如表2 和表3 所示。

表2 位置误差(X 向)(m)

表3 位置误差(Y 向)(m)
从表2 与表3 对比来看,融合IMU 后的位置误差在Y向有较大的改善,可以提高智能体在前进方向Y向上的可达性;同时在X向上也有较好的抑制效果,可以有效避免智能体脱离规划轨迹,引起不必要的碰撞。
5 结论
本文介绍了基于STM32H7 和STM32F4 微控制器的多冗余六轴惯性芯片BMI088 的导航控制一体机的设计过程,首先对稳压电源单元、导航运算单元和稳态运控单元等硬件电路进行了详细的介绍,然后介绍了软件工作流程及惯性器件标定和导航控制的软件实现。最后通过试验验证了多冗余惯性传感器对导航控制功能精度的改善效果,验证了导航控制一体机的设计成果,可以用于智能体的高精度导航和稳态控制。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
大电机技术(2022年3期)2022-08-06 07:48:24
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
核科学与工程(2021年4期)2022-01-12 06:30:04
中国特种设备安全(2021年5期)2021-11-06 05:09:08
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41