基于激光跟踪仪的俯仰角度测量方法研究
2024-03-16 10:10何长义徐志成邓育红李建勤
科学技术创新 2024年6期
汪 威,何长义,徐志成*,邓育红,李建勤,余 苏
(1.四川省产业计量测试研究院,四川 成都;2.四川省产品质量监督检验检测院,四川 成都;3.二重(德阳)重型装备有限公司,四川 德阳)
引言
角度测量在众多领域中扮演着关键的角色,在工业制造中,准确测量角度是确保零部件装配精度和产品质量的必要步骤[1-2]。在多种角位移测量方法中,可分为接触式测量和非接触式测量两大类别[3]。非接触式测量能够在不影响旋转体运动的前提下进行角度测量,为提高机械系统的精度和智能性提供了有力支持[4]。非接触式测量的发展为精密机械行业带来了更高的效率和精度,推动了智能化改造的进程,因此在精密机械智能化改造中得到了大量应用[5]。
激光跟踪仪作为一种非接触式测量工具凭借其精度高、非接触性和实时性等独特的技术特点,已经成功地应用于各种领域的角度测量领域中,并为这些领域的技术和研究提供了强有力的支持[6]。
1 角度测量技术
1.1 基于加速度计的角度测量技术
基于加速度计的倾斜角测量方法原理如图1 所示,被监测物体的倾斜角度由式(1)计算得出。

图1 基于加速度计的倾斜角度测量
式中:θ -加速度计的倾斜角度;gx-重力加速度在X轴上的分量;g-重力加速度。
基于加速度计的倾斜角测量方法仅适用于对相对静止物体的倾斜角度进行测量。因为在存在运动或震动的环境中,加速度计可能会受到来自外部环境的干扰,导致测量结果的不准确性。
1.2 基于机器视觉的角度测量技术
通过在光照下观察被测物体的成像,采用单个或多个图像传感器在不同位置观测同一被测物体,然后匹配各个图像传感器或不同位置的图像,最终获取被测物体的角度信息[8]。该方法具有较高的自动化程度,能够满足多角度的测量需求。然而,也存在无法对被测目标进行动态测量的限制以及对于存在遮挡或不在同一视场中的被测对象的应用相对较为困难的问题。
1.3 基于激光跟踪仪的角度测量技术
激光跟踪仪测量时,将靶球反射器(Spherically Mounted Retroreflector,SMR)放置在被测对象上,激光跟踪头向SMR 发射激光,光束反射回跟踪头。在SMR移动过程中,激光跟踪头会实时调整光束方向,以确保其始终准确对准SMR,从而实现对被测对象的空间位置和角度信息的精准测算。激光跟踪仪具备广泛的尺寸范围和高度精准的数据采集能力,结合专用的测量软件进行数据处理和分析,从而全方位解决角度测量问题[7-8]。
2 基于激光跟踪仪的角度检测原理
2.1 俯仰角测量系统
俯仰角检测系统主要包括测量对象、激光跟踪仪及支撑装置、数据处理设备3 部分。检测系统示意如图2 所示。其中在本系统中测量对象是测试转台摆臂的旋转角度;API 品牌的Radian 激光跟踪仪:包含激光发射装置、反射器、控制用电脑及三脚架;数据处理及建模软件为SpatialAnalyzer 三维测量分析软件。

图2 俯仰角检测系统
2.2 俯仰角测量系统工作原理
激光跟踪仪由干涉仪/测距仪与两个互相垂直的测角系统构成。测量时在目标点放置一个棱镜反射球,激光头发射并接收反射球返回的激光,仪器便可同时获取目标点的仪转角、仪顶角和斜距,即可求得目标点的三维坐标,如图3 所示。通过对多个目标点进行分析处理,即可求得摆臂每次的旋转角度。
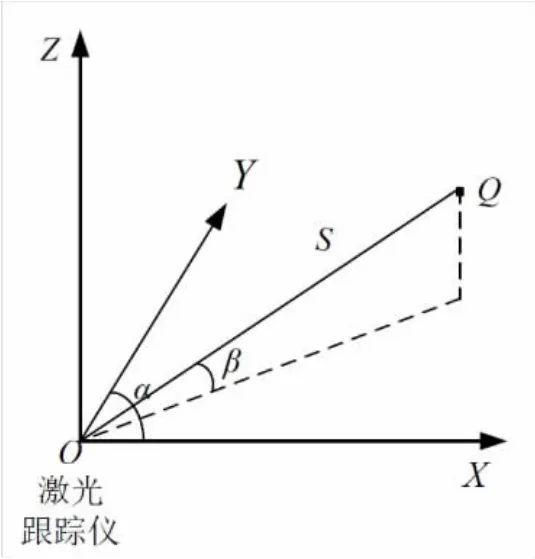
图3 激光跟踪仪测量原理
3 试验对比分析
3.1 试验方法
为了获取转台摆臂的俯仰角度,首先建立完善的测量系统。在可通视位置设置多个站点,以确保能够从所需的各个角度获取转台摆臂的俯仰角数据。随后,布设Radian 激光跟踪仪,建立坐标系,最后进行整体分析。此次摆臂俯仰角的测量通过如下两种测量方法。
3.1.1 拟合圆的圆心角
将靶球反射器放置在摆臂旋转轴的圆形凹槽内,旋转轴绕顺时针旋转,从-90 度旋转至90 度,每30 度测量一次,再逆时针旋转至-90 度,即回程。通过这些测量点,用SpatialAnalyzer 三维测量分析软件拟合出圆心,求得任意一点与起始点的夹角,即摆臂旋转角度,如图4 所示。将此过程重复2~3 次,求其平均值。
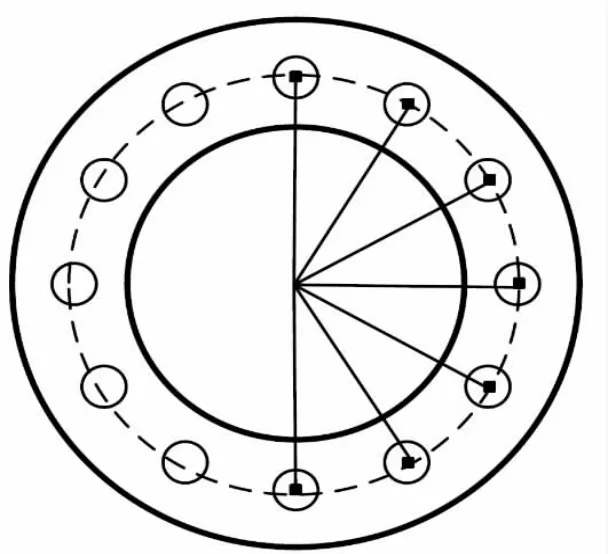
图4 拟合圆心角计算角度
3.1.2 直线之间夹角
同样将靶球反射器放置在摆臂旋转轴的圆形凹槽内,等接收器接收到反射器的激光后,将靶球反射器移动到摆臂旋转轴直径的另一侧,即构成一条过圆心的直线,如图5 所示。摆臂旋转轴每旋转30 度就得到一条直线,测量结束后,通过分析软件建模即可得到摆臂旋转角度。将此过程重复2~3 次,求其平均值。

图5 直线之间夹角计算角度
3.2 试验结果
为了进行基于激光跟踪仪的俯仰角测量系统的验证,试验过程中采用光学倾斜仪作为角度测量的基准,对激光跟踪仪的测量结果以及误差进行分析。测量结果如表1 所示。
他们才毕业,没有雄厚的家世也没有可依傍的关系网,两个人就是赤手博天下。但这不重要,有情饮水饱。温简相信,她和顾青的生活会慢慢地好起来。顾青做广告设计,为了赚钱他也会做一些兼职设计,这需要晚上不停地熬夜赶拼,熬得双眼布满血丝。温简去买了豆浆机,想要每天给顾青榨新鲜的豆浆喝。

表1 俯仰角测量结果
3.3 误差分析
3.3.1 非线性误差
根据表1 中的实验结果,采用式(2)得到角度测量的非线性误差
式中:YFS-满量程输出;△YLmax-各个测量点上的实际平均输出与理论输出的最大差值。
3.3.2 迟滞误差
采用式(3)得到角度测量的迟滞误差ξH
式中:△YHmax-正行程和回程平均测量特性之间的最大差值。
3.3.3 重复性误差
取置信概率系数为3,采用式(4)得到角度测量的重复性误差ξR
式中:m-测量点个数;Si-第i 个测量点上测量数据的标准偏差。
3.3.4 总误差
采用式(5)得到角度测量的总误差A
测量结果误差如表2 所示。

表2 角度测量结果误差对比
4 结论
本文在多种角度测量技术的基础上,从理论上分析了基于激光跟踪仪在转台摆臂俯仰角测量方面具有可行性。对比分析了两种基于激光跟踪仪的测量方法,通过多点拟合圆求圆心角的方法总误差为0.492%,而通过直线之间求夹角的方法总误差为0.061%,所以通过直线之间夹角计算摆臂俯仰角的方法是可行的。基于激光跟踪仪的角度测量方法为大尺寸设备空间角度测量提供了新思路。
猜你喜欢
机械工程与自动化(2022年4期)2022-08-23
经纬天地(2022年3期)2022-07-20
重型机械(2020年2期)2020-07-24
制造技术与机床(2019年12期)2020-01-06
体育科学(2018年4期)2018-05-03
制造技术与机床(2017年2期)2017-05-04
成都信息工程大学学报(2017年6期)2017-03-16
科技创新导报(2016年27期)2017-03-14
光学精密工程(2016年4期)2016-11-07
电源技术(2016年9期)2016-02-27