轮毂电机驱动特种车辆的电子差速控制研究
2024-03-16 01:35:12刘桓
微特电机 2024年2期
刘 桓
(兰州文理学院 电子与通信工程学院,兰州 730030)
0 引 言
民用大吨位多轴载货汽车或特殊用途车辆、军用多轴轮式装甲车辆发展迅速,研究多轴车辆转向非常迫切[1-2]。国内外很多重型汽车、特种汽车制造厂商纷纷采用多轮转向提高多轴车辆转向性能[1-3]。
轨迹转向是轮式车辆传统转向模式,具有结构工艺性好,易加工制造等优点。随着车轴数目增多,车辆转向控制越来越复杂[4-5]。速差转向常用于履带车辆,是轮式车辆领域快速发展的一项新技术。采用速差转向能够实现车辆原地转向与零半径转向,提高车辆机动性[6-7]。
轮毂电机驱动特种车辆若采用轨迹转向方式,其转向杆系布置复杂,占用空间大;若采用速差转向方式,忽略轮式车辆与履带车辆差异,轮式车辆特点得不到充分利用。因此,本文综合考虑轮式车辆特点和特种车辆转向需求,着重考虑了基于轨迹转向和速差转向的转向方案。
1 车辆总体结构及电传动方案
图1为8×8轮毂电机驱动特种车辆驱动结构框图。动力电池组为电源,轮毂驱动电机安装在车轮内部独立驱动各轮。
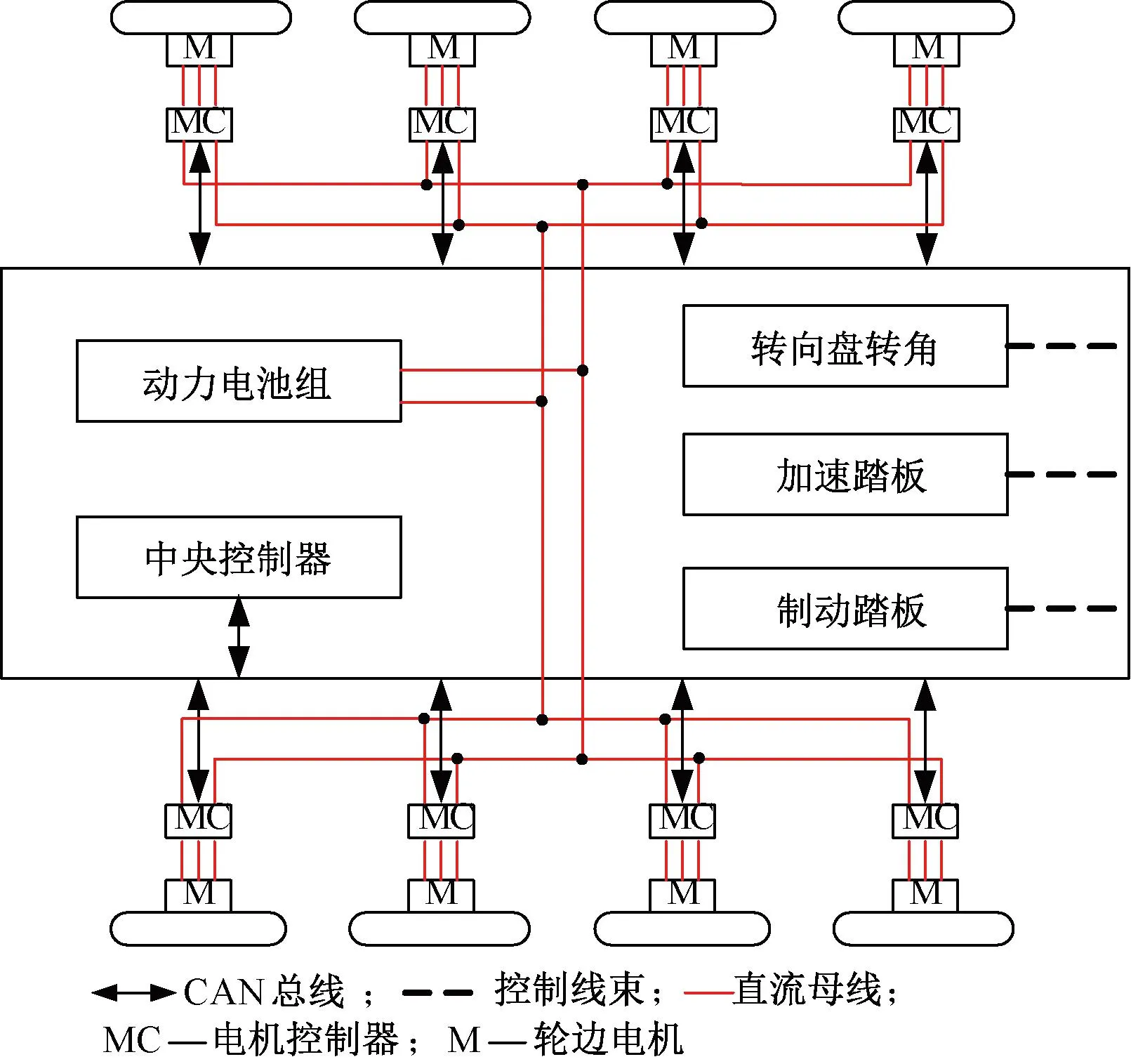
图1 8×8轮毂电机驱动特种车辆驱动结构框图
整车控制结构主要由中央控制器、电机控制器和CAN总线通讯网络等部分组成。中央控制器是整车的大脑,是上层控制器,根据驾驶员操作信号,综合车速等传感器信号,执行控制策略,实现各驱动电机协调控制。电机控制器是下层控制器,主要功能是根据中央控制器指令参数,执行电机控制算法,实时控制轮毂电机运行,同时将电机信息反馈给中央控制器。CAN总线通讯网络实现上、下层控制器之间信息通讯,是连接上、下层控制器的纽带。
2 8×8轮毂电机驱动特种车辆转向方案
2.1 轨迹转向
轨迹转向指采用独立于传动装置的转向机构改变导向轮角度,进而改变车辆行驶方向实现转向。由于导向轮可无级改变方向,因此车辆转向半径能够无级变化,且与车辆行驶时驱动是否无级变速无关。图2为轨迹转向原理,O为转向中心。
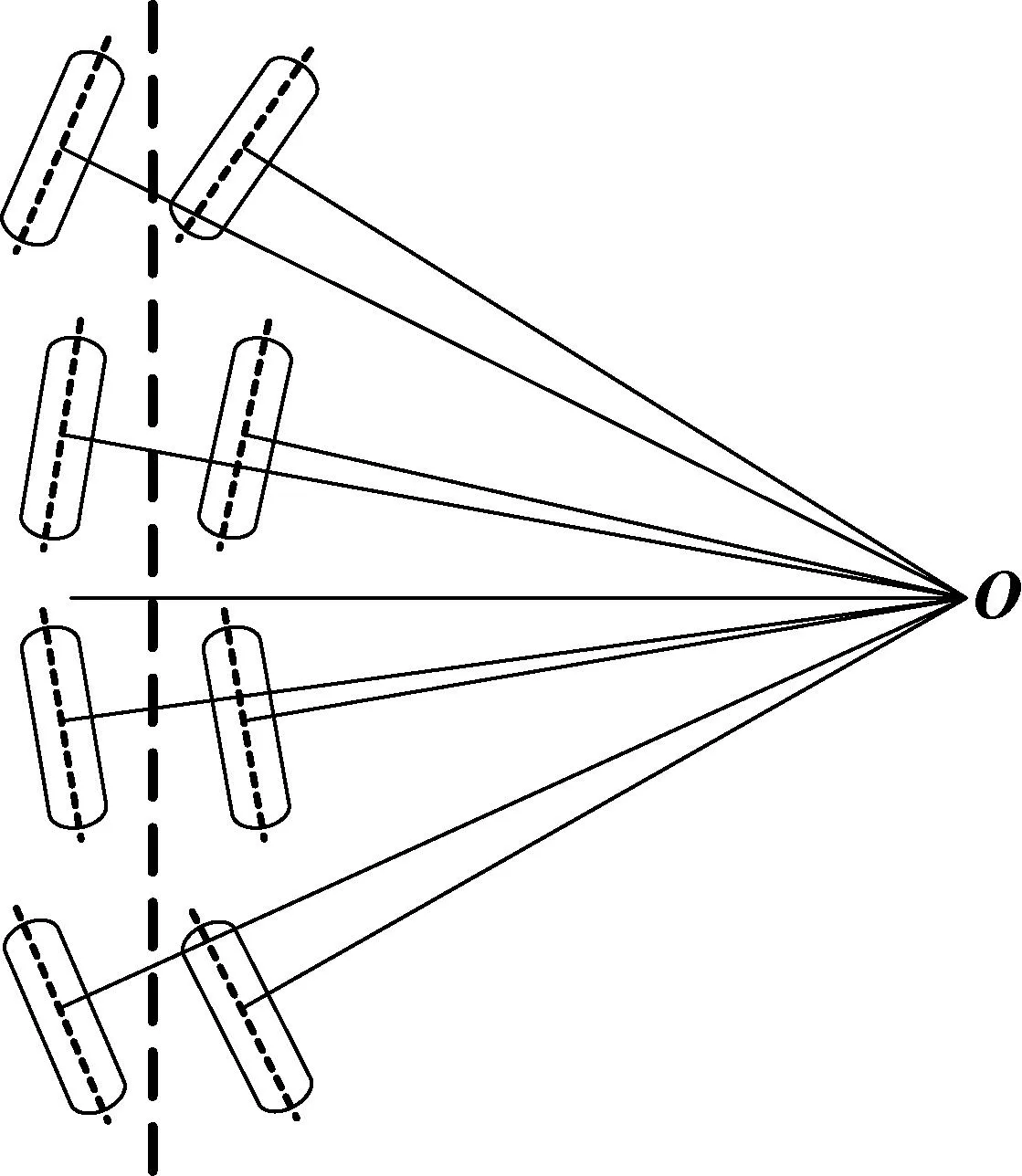
图2 轨迹转向原理
2.2 速差转向
速差转向指采用主动改变内外侧车轮转速形成两侧车轮转速差实现转向。采用速差转向车辆转向半径难以实现无级变化。图3为速差转向原理,O为转向中心,vin为内侧车轮速度,vout为外侧车轮速度。
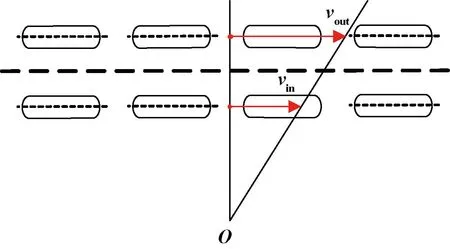
图3 速差转向原理
2.3 基于轨迹转向和速差转向的转向方案
基于轨迹转向和速差转向的转向方案是指在一般工况下采用双前桥转向方式,在特殊工况(零半径转向)下采用速差转向方式。
双前桥转向是在传统转向基础上增加一个转向前桥,采用摇臂机构连接两转向桥, 实现各转向轮协调转向。双前桥转向是汽车多轴转向中较成熟的一种,结构简单紧凑,转向可靠迅速, 广泛应用于重型载货汽车、多轴拖车、多轴挂车以及军用车辆等[8-9]。
假设汽车转向时车速较低且匀速行驶,采用Ackermann-Jeantand转向模型进行分析。为简化模型,认为车体是刚性的;不考虑轮胎滑移和滑转运动,车轮只做纯滚动运动;不考虑轮胎材质与结构上的非线性,轮胎侧向变形和侧向力成正比;瞬时转向中心位于双后桥中心线上。图4为双前桥转向原理,O为转向中心,C为车辆质心。图4中,B为轮距;L1为第一前轴与转向中心距离;L2为第二后轴与转向中心距离;L3为质心与转向中心距离;v为车辆行驶速度;v1~v8分别为各个车轮纵向平移速度;R为车辆转弯半径;R1~R8为各个车轮转弯半径;δ为转向盘转角。

图4 双前桥转向原理
3 电子差速控制器设计
电子差速控制器将加速踏板信号解析为期望车速值,再根据转向盘转角信号等解析为各个轮毂驱动电机期望转速值,然后经电机控制器得到各个轮毂电机期望转矩值,完成驱动动力分配。电子差速控制结构框图如图5所示。

图5 电子差速控制结构框图
3.1 驾驶员操作命令解析
加速踏板信号解析函数:
(1)
式中:vmax为车辆最高行驶速度值;α为加速踏板行程;α0为加速踏板最小有效行程;αmax为加速踏板最大有效行程。
转向盘转角信号解析函数:
(2)
式中:δ′为转向盘转角传感器信号;δ0为最小转向盘转角;δmax为最大转向盘转角。其中δ的符号代表转向,正号代表右转,负号代表左转。
3.2 驱动电机转速分配
3.2.1 直线行驶工况
车辆直线行驶时,根据轮毂驱动电机转速与车辆车速之间的换算关系,得到两侧轮毂驱动电机的转速期望值,电机控制器驱动电机运行。
设某一时刻期望车速值为v,则左右侧各轮毂驱动电机转速给定:
(3)

3.2.2 转向行驶工况
一般工况车辆采用双前桥转向方式,由速度瞬心定理各个车轮行驶速度应满足:
(4)
由阿克曼转向模型可得:
(5)
将式(5)代入式(4)可得:
(6)
则左右侧各轮毂驱动电机转速给定:
(7)
特殊工况(零半径转向)车辆采用速差转向方式,其转向原理与履带车辆转向原理一样。本文只考虑零半径转向,设置零半径转向档位。该档位时加速踏板信号依然解析为期望车速值,而转向盘转角信号只决定两侧轮毂驱动电机的转速期望值的正负,即两侧轮毂驱动电机期望转速值大小相等,方向相反。
转向盘转角解析算法:
(8)
两侧轮毂驱动电机期望转速值:
(9)
4 仿真和实验结果
仿真过程中,假设8×8轮毂电机驱动特种车辆向左转向行驶,则驱动轮1、驱动轮3、驱动轮5、驱动轮7为内轮,驱动轮2、驱动轮4、驱动轮6、驱动轮8为外轮。由于各轮之间具有相似性,为简化仿真波形,故本文只给出以驱动轮1、驱动轮2为例的仿真结果,其他驱动轮的仿真结果不再赘述。ω2与ω1转速差随转向角和车速变化曲线如图6所示。车辆转向行驶后,内轮转速先减小后增大,外轮转速逐渐增大,且转速的变化随着转向角的增加而变大。外轮转速之差随转向角的增加而增加,且转向角越大,转速的增加量越大。

图6 ω2与ω1转速差随转向角和车速变化曲线
8×8轮毂电机驱动特种车辆实验台架包括直流电源、永磁无刷直流电机、测功机系统总成、中央控制器、电机控制器等。中央控制器以TMS320F28335芯片为控制核心,辅以CAN总线通讯接口等外围电路。永磁无刷直流电机参数:额定电压DC96 V,额定功率3 kW,额定转速1 000 r/min,相电阻0.3 Ω,相电感0.85 mH,极对数23对。图7为8×8轮毂电机驱动特种车辆实验台架。

图7 8×8轮毂电机驱动特种车辆实验台架
以驱动轮1、驱动轮2为例,考察不同转向下电子差速控制结果。图8(a)、图8(b)为同一转速下不同转向盘转角的驱动轮转速波形,图8(c)为零半径转向下驱动轮转速波形。可见,各驱动轮根据差速策略分配转速。
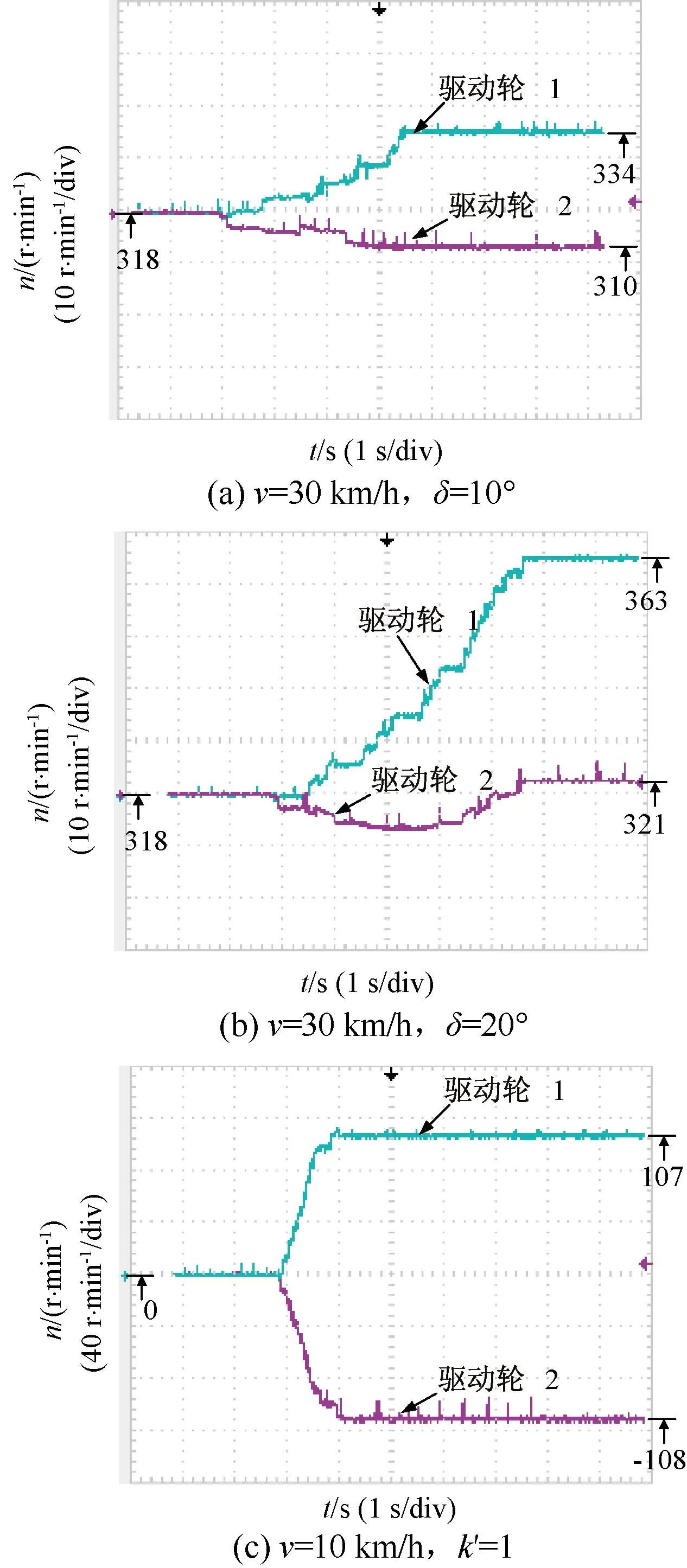
图8 不同转向情况各驱动轮转速波形
5 结 语
8×8轮毂电机驱动特种车辆既有轮式车辆特点,又需满足特种车辆转向要求,本文着重考虑了基于轨迹转向和速差转向的转向方案。仿真和实验结果表明各驱动轮可根据驾驶员意图实现转速分配,满足车辆行驶要求,为下一步样车试验奠定基础。
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20 06:11:16
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
上海涂料(2021年5期)2022-01-15 06:09:26
小学科学(学生版)(2021年2期)2021-03-29 07:33:50
装备制造技术(2020年9期)2021-01-26 00:15:08
中国新技术新产品(2020年4期)2020-05-05 15:49:48
少儿美术(快乐历史地理)(2018年1期)2018-09-25 02:50:58
制造技术与机床(2017年10期)2017-11-28 05:24:18
农村百事通(2017年9期)2017-07-07 15:20:32