
面向林地作业的腿履复合移动机器人构型设计与越障策略研究
2024-03-14 10:23张铂轩王立超袁泽浩孙术发王扬威
机床与液压 2024年3期
张铂轩,王立超,袁泽浩,孙术发,王扬威
(1.东北林业大学机电工程学院,黑龙江哈尔滨 150040;2.中国铁道科学研究院机车车辆研究所,北京 100081;3.东北林业大学工程技术学院,黑龙江哈尔滨 150040)
0 前言
森林多处于山地和丘陵地带[1],林地环境复杂多变,林地地形障碍物多且分布随机,需要林地作业机器人具有良好的地形适应性和越障性能。移动机器人大多通过变化自身结构来提高越障能力。北京理工大学的ZHAO 等[2]设计一种基于四连杆机构的履带机器人,基于四连杆机构的变形来调节机器人驱动履带轮,改变履带俯仰角,以提高机器人越障高度;但该结构在使用过程中对履带变形量有较高要求,且需要增加额外紧固机构保证履带在变形过程中不会脱落或松弛。赵欣然等[3]设计一种可变形轮腿搜救机器人,该机器人配有4个可变形车轮,由转动圆盘与连杆驱动车轮变形,通过电机驱动可使车轮张开为三段弧腿,提高了机器人越障能力;但该结构越障性能依赖弧腿高度与可变形车轮张开幅度,车轮张开幅度过大会影响整体稳定性,增大发生倾覆可能,弧腿高度增大会增大车轮整体结构。徐俊翊等[4]设计了可调节式履带车,通过履带车底盘调节横杆与Ω型调节杆,调节底盘履带与障碍物接触点,使机构在越障过程中不发生倾翻保持自身稳定性。陈程等人[5]设计一种多模式全向移动机器人,通过切换运动模式,实现轮式高速移动,多足模式越障,提高了极限越障高度和爬坡能力。杨洋等人[6]设计了一种具有多段变形轮结构的移动机器人,具有4种多段变形轮结构,适用于轮式无人越障车辆,提高了车辆越障高度。刘超等人[7]设计一种新型轮腿机器人,通过单环闭链变胞机构切换轮腿工作模式提高自身越障高度。孟广耀等[8]研制一种新型变形履带式机器人,能够在变形过程中保证机器人履带长度不变且持续张紧。朱岩等人[9]基于椭圆定理设计了履带可变形机器人,能保证变形时履带长度不变,且履带可以持续张紧。YOKOTA等[10]设计了多节履带结构,通过在传统履带上增加两个主动关节来调节履带俯仰角度实现越障。KIM等[11]设计一种被动铰接式履带机器人,通过改变摇臂连杆来提高非结构化路面上的地形适应性。ARAI等[12]设计一种多关节连接履带式机器人,由加强型金属履带单元和叶片弹簧机构组成,可以实现机器人履带体间角度调节。现有研究多是通过履带结构变形或轮腿结构变形提升机器人的越障能力,但可变形履带结构需要加工特殊材质和结构的履带,且长时间工作容易使履带部分发生破损,降低结构可靠性;而变形式轮腿式结构需要加装额外的电机来驱动其变形,且控制系统复杂。
本文作者针对林地作业对移动机器人运动和越障性能的需求,基于结构仿生原理,设计一种新型腿履复合移动机器人构型,建立腿履复合机器人单腿运动学模型,提出腿履复合移动机器人越障策略,研究腿履复合机器人越障过程中关节角度和关节力矩的变化规律。
1 腿履复合移动机器人构型设计
林地作业腿履复合移动机器人主要用于复杂林地环境下的勘测作业,虽然对负载能力要求不高,但是需要灵活应对复杂地形环境。犬类动物依靠腿部骨骼结构实现灵活的行走和奔跑,为机器人结构设计提供了优异的仿生蓝本[13]。犬类腿部骨骼结构(见图1)主要包括大腿、小腿、膝关节和髋关节,对犬类腿部骨骼的解剖测量显示大腿与小腿比例约为3.8∶4[14],通过肌肉和骨骼的协调运动实现多种步态。
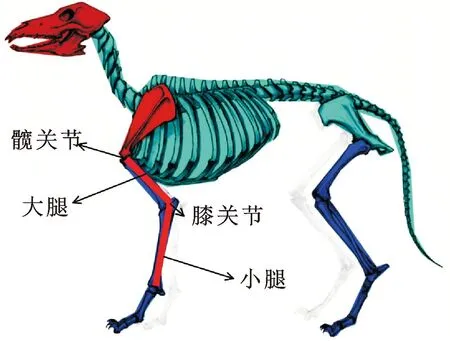
图1 犬类骨骼结构
腿履复合移动机器人(见图2)采用仿生四足构型,每条腿包含3个自由度,分别为髋关节和膝关节,其中膝关节有1个自由度,髋关节有2个自由度,用于实现侧摆和外摆动作,外摆自由度主要用于机器人重心调整和改变行进方向。

图2 腿履复合式移动机器人构型
腿部结构(见图3)由足端、大腿、小腿、履带、履带板、履带支撑轮、履带电机及主动轮和关节电机(髋关节和膝关节)组成。

图3 单腿结构
足端为半球形状,通过连接件与小腿连接。小腿与大腿之间通过关节电机直接连接,大腿一端与膝关节电机固定端相连接,另一端与髋关节的侧摆关节电机转动端相连接。履带机构采用与大腿一体化的设计方案,履带侧板固定在大腿侧边,履带驱动电机固定在履带侧板上,主动轮和从动轮呈平面梯形布局,左、右侧护板可以防止林区地面杂物卷入履带行走机构。髋关节侧摆关节电机与外摆关节电机通过L形支架连接,髋关节外摆电机固定端与机器人身体连接。
2 腿履复合机器人运动学建模
机器人腿部关节坐标系如图4所示,初始位姿状态下D-H坐标参数见表1。

表1 D-H参数

图4 机器人单腿坐标系
腿履复合机器人单腿运动学方程可表示为
(1)
机器人足端位置可以表示为
(2)
其中:l小腿为小腿长度。
林地的主要障碍是倒伏的树木,调查表明倒木直径在10 cm以内的占83.51%[15]。为保证移动机器人具有足够的越障性能,腿部越障目标高度确定为15 cm。依据生物腿部结构比例关系,设计小腿与大腿的长度比例为1∶1,均为30 cm。关节角度参数如表2所示。

表2 关节角度参数
机器人腿部具体结构参数见表3。

表3 腿部结构参数
3 机器人腿履复合越障策略与仿真
林地环境中的障碍类型可分为台阶和倒木两类。针对不同类障碍物,腿履机器人通过不同的越障策略实现越障。
3.1 台阶类障碍越障策略与仿真
腿履复合越障时,腿履复合机器人借助腿部带动履带变结构完成一定高度台阶越障。台阶障碍越障临界状态为:机器人质心在竖直方向越过障碍物顶点。如图5所示,主要分为4个阶段,图5(a)阶段一机器人接近台阶障碍物,图5(b)阶段二机器人前腿髋关节带动履带转动θ2,使得前腿履带越过障碍物顶点,则有:
(3)

图5 腿履台阶越障示意
其中:θ2为前腿髋关节转角;H为台阶障碍物高度;r1为履带带轮半径;l大腿为大腿长度。
图5(c)阶段三机器人身体质心G在竖直方向越过障碍物顶点,则有:
β1=arctanL1/l1
(4)
其中:β1为身体与水平方向俯仰角;L1为身体质心到前腿髋关节距离;l1为质心到髋关节中心距离。
台阶越障阶段二中为了确保前腿履带越过顶点后能与台阶上表面接触,θ2<45°;在阶段三中为了防止机器人发生倾覆,机身俯仰角β1<30°,则台阶越障极限高度Hlim为
Hlim=min{Hlim1,Hlim2}
其中:Hlim1=sinθ2×l大腿-r1,Hlim2=sinβ1×l1+r1。
以腿履台阶越障时,示意见图5,此时各腿部髋关节力矩有:
(5)
其中:τHF为前腿髋关节力矩;τHB为后腿髋关节力矩;FF1为前腿履带与地面接触力;FB1为后腿履带与地面接触力;θ2F为前腿髋关节变量;θ2B为后腿髋关节变量。
以足式台阶越障时,示意见图6,此时各腿部髋关节力矩有:
(6)

图6 足式台阶越障示意
其中:τHRB为右后腿髋关节力矩;τHLB为左后腿髋关节力矩;τHRF为右前腿髋关节力矩;τHLF为左前腿髋关节力矩;FRB为右后腿足端支撑力;FLB为左后腿足端支撑力;FRF为右前腿足端支撑力;FLF为左前腿足端支撑力。
膝关节力矩有:
(7)
其中:τKRB为右后腿膝关节力矩;τKLB为左后腿膝关节力矩;τKRF为右前腿膝关节力矩;τKLF为左前腿膝关节力矩。
ADAMS仿真机器人腿履复合台阶越障过程见图7,机器人移动到障碍前,2个前腿侧摆髋关节带动腿部抬起,履带行进到前腿与障碍接触后,通过前后腿侧摆髋关节的协调转动,履带推进实现机器人爬上障碍。机器人质量参数配置为:躯体10 kg,大腿及履带部分5 kg,小腿部分2 kg。根据公式(3)改变腿部接近角,在ADAMS里通过STEP函数驱动。建立传感器,添加前腿履带与台阶部件接触力,当传感器检测到接触力大于0时,前腿髋关节开始改变接近角。

图7 石台、石块越障仿真
假定障碍台阶高度150 mm,履带带轮直径75 mm,机器人初始状态为履带模式(即侧摆髋关节θ2=-90°),利用ADAMS软件仿真分析机器人越障过程中质心位移(见图8)和关节角度(见图9)的变化规律。仿真结果表明:机器人质心变化较为平稳,髋关节角度变化曲线平滑。
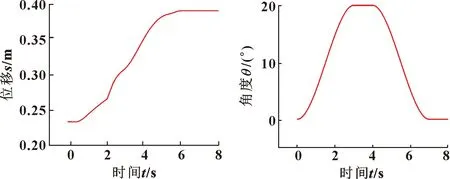
图8 机器人质心位移
腿履复合台阶越障时,髋关节峰值力矩出现在4.97 s,此时,前腿履带与台阶顶点相接触,产生峰值力矩。足式台阶越障时,关节力矩峰值出现在0.15 s,此时髋关节正在快速抬起,有较大惯性作用。
机器人腿履复合与足式越障过程中,机器人腿部关节力矩变化如图10所示。结果表明:腿履复合越障时,髋关节峰值力矩在15 N·m左右,膝关节峰值力矩在6 N·m左右;足式越障时,髋关节峰值力矩在17.5 N·m左右,膝关节峰值力矩在8.8 N·m左右。可以看出,腿履复合越障策略在台阶越障时所需的关节力矩更小。
3.2 倒木障碍越障策略与仿真
腿履复合越障时,由于倒木径级大于履带轮直径,因此腿履复合机器人借助腿部带动履带变结构完成倒木障碍越障。当机器人以腿履式越障时,在倒木跨越阶(见图11(a))前腿履带部仅有前端与地面、后端与倒木支撑,此时髋关节受力较大。在前腿跨越倒木后,由于倒木径级大于履带支撑下身体到地面的距离,因此需要机器人髋关节改变较大角度支撑起身体(见图11(b))。通过仿真试验得到腿履式倒木越障关节力矩曲线见图12。图12中的前腿力矩峰值出现在3.05 s,此时前腿履带前端触地产生较大冲击。

图11 腿履式倒木越障示意

图12 腿履式倒木越障髋关节(a)、膝关节(b)力矩
由于腿履式越障关节存在较大冲击,因此考虑使用腿部进行越障。如图13所示,主要分为3个阶段。图13(a)所示阶段一前腿履带绕髋关节抬起,使履带与倒木接触,此时髋关节角度变量为
(8)

图13 倒木越障示意
其中:θ2F为前腿髋关节角度变量;D为倒木直径。
图13(b)所示阶段二前腿与后腿由履带式转为足式,通过机器人足端压力传感器来控制机器人膝关节转角,前腿膝关节转动变量为θ1F,后腿膝关节转动量为θ3B。为完成后腿履带式转为足式,后腿膝关节抬起h1,其表达式为
(9)
其中:h1为履带式转换为足式过程中膝关节抬起高度;h′1为足式行走过程中膝关节抬起高度;θ3B为后腿膝关节角度变量;α7为履带模式下后腿大腿与小腿之间角度;θ2B为后腿髋关节角度变量。
通过h1的关系式,联立得到后腿髋关节与膝关节之间关系式:
θ2B=θ3B+α7+arccos(h1/l小腿)-270°
(10)
图13(c)所示阶段三,机器人以足式支撑身体,机器人自身重力G由四足与地面的正压力支撑,G的表达式为
G=2FNF+2FNB
(11)
其中:FNF为机器人前侧单腿支撑力;FNB为机器人后侧单腿支撑力。
当机器人前腿由履带式转换到足式支撑后,前腿在转动身体时,足地接触处会产生一个切向力阻止足部产生向后的相对滑动。该切向力FTF表达式为
FTF=f+FT
(12)
其中:f为足底接触面摩擦力,摩擦力可以通过正压力与接触面摩擦因数表示,有f=FNF×μ;FT为土壤剪切力,有:
FT=-πr2[c+σtanφ](1-e-j/K)
(13)
其中:c为土壤内聚力;j为土体切向变形量;K为土体剪切变形模量;σ为足地接触面法向正应力;φ为土壤内摩擦角。
当四足机器人四足处于支撑相时,前后腿关节扭矩分别为
(14)
其中:τ膝F为前腿膝关节扭矩;τ髋F为前腿髋关节扭矩;τ膝B为后腿膝关节扭矩;τ髋B为后腿髋关节扭矩。
倒木障碍物截面近似为圆形,其顶部没有足够平面使履带接触为越障提供动力,此时考虑使用足式越障为主、履带辅助越障的策略。
建立传感器,添加前腿履带与倒木部件接触力,当传感器检测到接触力大于0时,前腿髋关节开始改变接近角。假定倒木障碍直径尺寸为150 mm,机器人越障过程仿真结果如图14所示。当机器人前履带接触倒木时,髋关节侧摆关节带动前腿大腿部抬起,使履带下侧与倒木接触,同时膝关节带动小腿转动,使前腿小腿与地面接触。膝关节持续带动小腿转动,使前腿小腿部支撑并带动身体,同时后腿膝关节带动小腿转动,转换为四足接地。前腿膝关节转动,后腿膝关节配合,使身体重心越过倒木障碍,直至后腿履带部与倒木接触。完成倒木越障后,前腿、后腿均转换为履带式。

图14 倒木越障仿真
机器人前腿关节力矩变化曲线如图15所示。1.07 s之前前腿侧摆髋关节带动履带部转动,增大接近角。侧摆髋关节在1.07 s处力矩曲线产生突变,此时前腿履带部与倒木接触,通过前腿髋关节支撑起身体。1.07~6.84 s,前腿髋关节作为足式模式支撑提供支撑力矩。在6.84 s时,两关节力矩突变,此时前腿膝关节履带部与地面接触,前腿转为履带式。6.84~7.87 s,机器人身体前倾,由前腿髋关节主要支撑身体。前腿膝关节在1.34 s之前带动小腿转动,1.34~3.0 s逐渐由履带式转为足式支撑。膝关节在3.0 s处产生突变,此时前腿足端与地面接触,前腿转换为腿部完全支撑。3.0~6.84 s,前腿作为足式膝关节提供支撑力矩与主动力矩越障。后腿关节力矩变化曲线如图16所示。在1.07 s前腿与倒木接触,机器人后腿为履带式侧摆髋关节提供支撑力矩。1.07~5.73 s髋关节提供支撑力矩,髋关节在5.73 s处有突变,此时后腿履带与倒木接触,通过后腿髋关节支撑身体。后腿膝关节在4.87 s处有突变,此时后腿变为足式支撑。4.87~9 s后腿为足式支撑,膝关节提供支撑力矩与转动力矩。

图15 前腿髋关节越障力矩

图16 后腿髋关节越障力矩
台阶障碍和倒木障碍的越障策略仿真结果表明:腿履复合移动机器人能够较为灵活地实现移动模式的切换,并能实现腿履复合协同越障,越障过程中仅在与障碍接触时刻对关节力矩有冲击影响,运动过程中较为平稳。
4 结论
(1)基于犬类腿部的生物学分析,设计一种面向林地作业的腿履复合四足移动机器人构型,建立了机器人腿部的运动学模型。
(2)针对腿履复合机器人的构型特点,提出针对台阶类障碍和倒木类障碍的复合越障策略。
(3)仿真分析了腿履复合机器人的越障过程,并与足式越障策略进行了对比,结果表明:足式越障能实现更高的越障高度,但是针对大多数的林地障碍来说,腿履复合机器人的特殊复合形式越障能有效减小关节力矩。
腿履复合移动机器人兼具腿式与履带式结构的特点,腿履协同运动提高了机器人越障性能,降低了腿履机器人越障所需关节力矩。为复杂林地环境下的移动作业机器人设计提供了新的思路,后续将进一步优化结构,并进行样机研制和控制系统研发。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
北京航空航天大学学报(2022年6期)2022-07-02
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
制造技术与机床(2017年3期)2017-06-23
课外生活(小学1-3年级)(2017年4期)2017-05-22
中国卫生(2015年6期)2015-11-08
橡胶工业(2015年4期)2015-02-23
中国卫生(2014年11期)2014-11-12
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
