互联网+时代下混合式教学模式在工业机器人轨迹绘制实训项目的应用与实践*
2024-03-14 10:59蒋莉李清江徐丽春
中国教育技术装备 2024年4期
蒋莉 李清江 徐丽春
遵义职业技术学院机电与信息工程系 贵州遵义 563000
0 引言
在“互联网+”“工业4.0”和《中国制造2025》背景下,我国智能制造产业进入了一个飞速发展的时期,中国作为“世界工场”正在快速进行技术升级,从制造大国走向“智”造强国[1-2]。而工业机器人作为《中国制造2025》的第二个重点领域,扮演着重要角色,得到了迅速的发展,各行业“机器人换人”的步伐将进一步加快,特别是传统手工业在改革发展中对机器人的重复运动精度提出了更高的要求,机器人在异形表面的打磨、去毛刺、图形的切割、喷漆和装配等多项连续作业中得到了广泛的应用。然而,无论是何种应用,多轴联动机器人的连续轨迹规划以及控制一直是研究的热点和难点[3]。
2016 年,习近平总书记在全国高校思想政治工作会议上强调,“要坚持把立德树人作为中心环节,把思想政治工作贯穿教育教学全过程,实现全程育人、全方位育人,努力开创我国高等教育事业发展新局面”。同时强调“要用好课堂教学这个主渠道,思想政治理论课要坚持在改进中加强,提升思想政治教育亲和力和针对性,满足学生成长发展需求和期待,其他各门课都要守好一段渠、种好责任田,使各类课程与思想政治理论课同向同行,形成协同效应”[4]。为深入贯彻落实习近平总书记关于思想政治教育的重要论述,中共中央办公厅、国务院办公厅印发了《关于深化新时代学校思想政治理论课改革创新的若干意见》(简称《意见》)。《意见》指出:“大学阶段重在增强使命担当,引导学生矢志不渝听党话跟党走,争做社会主义合格建设者和可靠接班人。”[5]工科类课程进行课程思政,对专业学科教师而言存在一定的难度[6-8]。
本文以FANUC 公司的六轴工业机器人为研究对象, 以党旗图案为表现手段,详细描述了“互联网+”时代下,混合式教学模式在工业机器人编程与调试课程教学实施过程中的具体应用。在混合式教学模式中,让学生通过动手实践,将现场示教编程与离线自动编程进行对比,反思不同编程方法的优缺点,增强学生独立思考的能力,并在实践中引入课程思政,潜移默化地对学生进行思想政治引导,厚植学生工匠精神、爱国主义精神等,实现课程思政与专业知识协同育人[9-10]。
1 实训项目描述
以党旗图案为例,按党旗图案中的轨迹(周边的长方形及金黄色党徽图案)进行现场编程和离线编程。
2 主要实训设备
主要实训设备包括:1)安装有ROBOGUIDE 软件的计算机10 台;2)工作站主体模型;3)笔形工具,实现轨迹的绘制工作;4)党旗图案模型;5)带有FANUC LR Mate 200iD/4S 小型机器人的真实轨迹绘制基础工作站4 套。
3 实训项目实施流程
为了充分调动学生的学习兴趣和利用实训设备,在实训项目实施之前,将根据上课班级人数进行分组,同时对实训设备进行分配,设计出工业机器人轨迹绘制实训项目教学实施流程,如图1 所示。

图1 工业机器人轨迹绘制实训项目教学实施流程
4 实训项目设计
4.1 实训项目目标
4.1.1 知识目标
1)通过对实训任务的练习,加深对机器人动作指令的理解;
2)掌握机器人工程文件及轨迹离线仿真工作站的创建方法;
3)通过“CAD-To-Path”(模型—程序)转换功能掌握轨迹曲线与路径的创建方法。
4.1.2 技能目标
1)掌握建立TP 程序的方法,能够对程序中的指令进行创建、复制、删除等操作;
2)能够创建离线编程仿真工作站;
3)学会使用动作指令(关节、直线、圆弧)控制机器人运动;
4)能够修正离线程序并导出运行。
4.1.3 素质目标
1)培养独立思考分析、决策的能力;
2)让学生接受爱国主义教育(党旗象征意义);
3)在寻找示教点的操作过程中不断追求精益求精的工匠精神。
4.2 实训项目实施
工业机器人编程与调试课程实践操作性较强,在实际开展过程中不同的学生可能会出现不同的问题,如果只依靠课堂上短短的几十分钟,很可能造成进度滞后、教学任务无法完成、学生在学习过程中很吃力等问题。混合式教学模式的应用可以增加学生的学习时长,提高学生学习的主观能动性,进而使其高效地完成教学任务。因此,本项目依托“互联网+”时代下应用混合式教学模式来实施。这里笔者所采用的混合式教学模式是将基于学习通网络平台的线上课前准备教学、传统线下课堂教学、学生完成理论知识的学习后的分组实践教学及课后拓展训练等全方位有效结合而成的一种新型教学模式,该模式能有效整合利用各类教学资源和实训设备,有利于实现课程的教学目标、提高教学质量,充分发挥“以学生为主体,以教师为引导”课程改革的作用。
教师线上课前的教学准备:学生线上课前预习并自主学习,线上教师与学生的互动交流。
线下的课堂教学:教师依据学生线上学习情况,及时了解学生在学习通平台上相关任务的完成情况,归纳并总结学生在本次实训项目学习中普遍存在的问题,安排线下教学课堂的重难点内容并在课堂上给学生做讲解及示范性操作,同时与学生进行面对面的互动交流学习。
实训项目实施:分成现场示教编程和离线仿真编程两个类别,每个类别里面又将按学生人数分成不同的组别。
4.2.1 现场示教编程实训实施
1)开机操作。打开电源开关,将机器人控制柜置于“T1”模式下,示教器开关置于“ON”状态;手动操作将笔形工具安装在机器人的快换接头上。
2)创建程序步骤。
STEP1 按下示教器上的【SELECT】(程序选择)键,显示程序目录画面。
STEP2 按下【F2】(创建),出现创建程序画面。通过【↑】【↓】键选择程序名称的输入方法,并输入程序名称。
STEP3 按下【编辑】或者【ENTER】(回车)键,可以进入程序编辑页面。
3)编辑程序。
STEP1 添加指令:当机器人TCP 点处于某个位置和姿态时,按下【点】,选择想要的动作指令,机器人当前的位置会被记录下来。
STEP2 更新位置:如果某条指令中记录点的位置不符合要求,需要更新,只需要将机器人调整到新的位置,移动光标到指令行号码上,按下【SHIFT】+【TOUCHUP】即可更新位置信息。
STEP3 修改指令数据:当光标位于指令中的某个部分中时,下方的功能键则出现相应的功能,用【选择】配合数字键来修改指令数据。
STEP4 指令编辑功能:当光标移动到指令行号码上,按下【NEXT】键,切换屏幕下方功能。选择【编辑】,可以对指令进行插入、删除、剪切、复制等操作。
4)示教轨迹。机器人在执行有效轨迹之前需要有一个点作为准备点或者安全点,所以一般为P[1]点,依次示教其余轨迹点并将程序填写完整。
5)示例参考程序及部分程序注释如表1 所示。
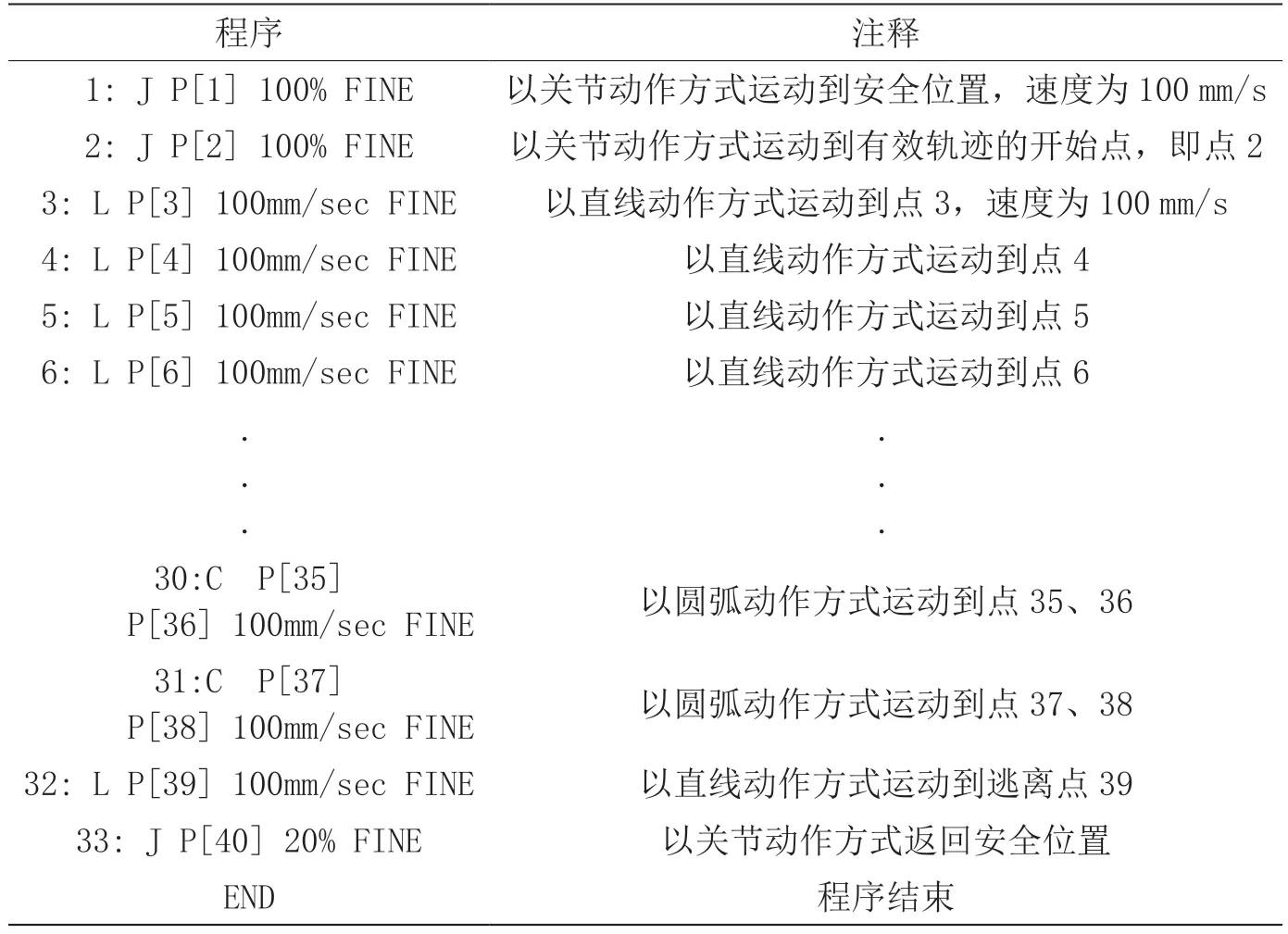
表1 工业机器人轨迹绘制示教编程参考程序
6)手动执行:将光标移动到第一行指令,按住【SHIFT】键,再按下【FWD】键,顺序运行程序。
4.2.2 离线仿真编程实训实施
1)构建仿真工作站。创建机器人工程文件→将工作站基座以Fixture 的形式导入→导入笔形工具作为机器人的末端执行器→将党旗图案模型以Part 的形式导入→设定新的用户坐标系。
2)轨迹分析。按党旗图案模型的形态,形成2 个完整的封闭轮廓,这就意味着有2 部分完整封闭轨迹。其中党旗图案的外围长方形为一部分,党徽图案为另一部分。因此,进行编程时,一个封闭轨迹对应着一个程序,分别对其进行编程,最后应用主程序调用子程序编程方法完成轨迹绘制图案。
3)生成轨迹程序具体步骤。
STEP1 打开轨迹绘制功能窗口:在“Cell Browser”导航目录窗口中相对应的“Part”下找到“Features”,鼠标右键单击选择“Draw Features”,弹出“CAD-To-Path”窗口。
STEP2 激活画线功能:鼠标左键单击“工件”,激活画线的功能,激活之后的工件高亮显示。
STEP3 党旗外轮廓起点捕捉:首先,绘制党旗外轮廓部分的路径,鼠标左键单击【Closed Loop】(捕捉闭合轮廓线)按钮,将光标移动到模型上,模型的局部边缘高亮显示,图中较长的竖直线是鼠标捕捉的位置。其次,移动鼠标改变轨迹位置,调整到合适位置,单击鼠标左键确定路径的起点,将光标放在绘图平面上预览完整轨迹路径。最后,双击鼠标左键,确定生成轨迹路径,模型的轮廓以较细的高亮黄线显示,并产生路径的行走方向。
4)程序设置具体步骤。
STEP1 在弹出的特征轨迹设置窗口中选择“General”(常规)选项卡,将程序命名为“chang01”,选择工具坐标系1 和用户坐标系1,单击“Apply”按钮完成设置。
STEP2 切换到“Prog Settings”(程序设置)选项卡,设置动作指令的运行速度和定位类型,单击“Apply”按钮完成设置。
STEP3 切换到【POS Defaults】(示教位置默认)选项卡下进行关键点位置和姿态的设置。
STEP4 切换到“Approch/Retreat”(接近点/逃离点)选项卡下进行接近点和逃离点的设置。勾选增加接近点和逃离点选项,设置动作指令的动作类型全部为直线,速度设置为2 000 定位类型不变,设置点的位置为-100。
STEP5 返回到“General”(常规)选项卡,单击“General Feature TP Program”生成机器人程序。
STEP6 单击工具栏中的【CYCLE START】按钮或者用虚拟TP 试运行“CHANG01”程序。
STEP7 用同样的方法创建党徽图案的轨迹程序“DANGHUI01”。
5)创建主程序。在虚拟示教器中创建一个主程序“PNS0001”,用程序调用指令将子程序整合,形成一个完整的程序。
6)测试运行程序。单击工具栏中的启动运行按钮,测试运行仿真程序。
7)修正程序并导出到真实工作站调试运行。运行PNS0001 主程序,真实工作站进行轨迹绘制,运行结果显示出党旗的大小及样式与离线仿真工作站中的模型轮廓基本一致。
4.3 实训项目评分标准
通过实训项目实施,设计出工业机器人轨迹绘制实训项目评分标准,如表2 所示。

表2 工业机器人轨迹绘制实训项目评分标准
4.4 实训项目课程思政的设计
工业机器人编程与调试课程中蕴含着丰富的思政元素,可以激发学生爱党爱国、勇挑时代重任、恪守职业道德、树立高尚品德,这就需要专业课教师结合课程内容对思政资源进行挖掘、阐释。实训项目实施过程中的课程思政设计如表3 所示。
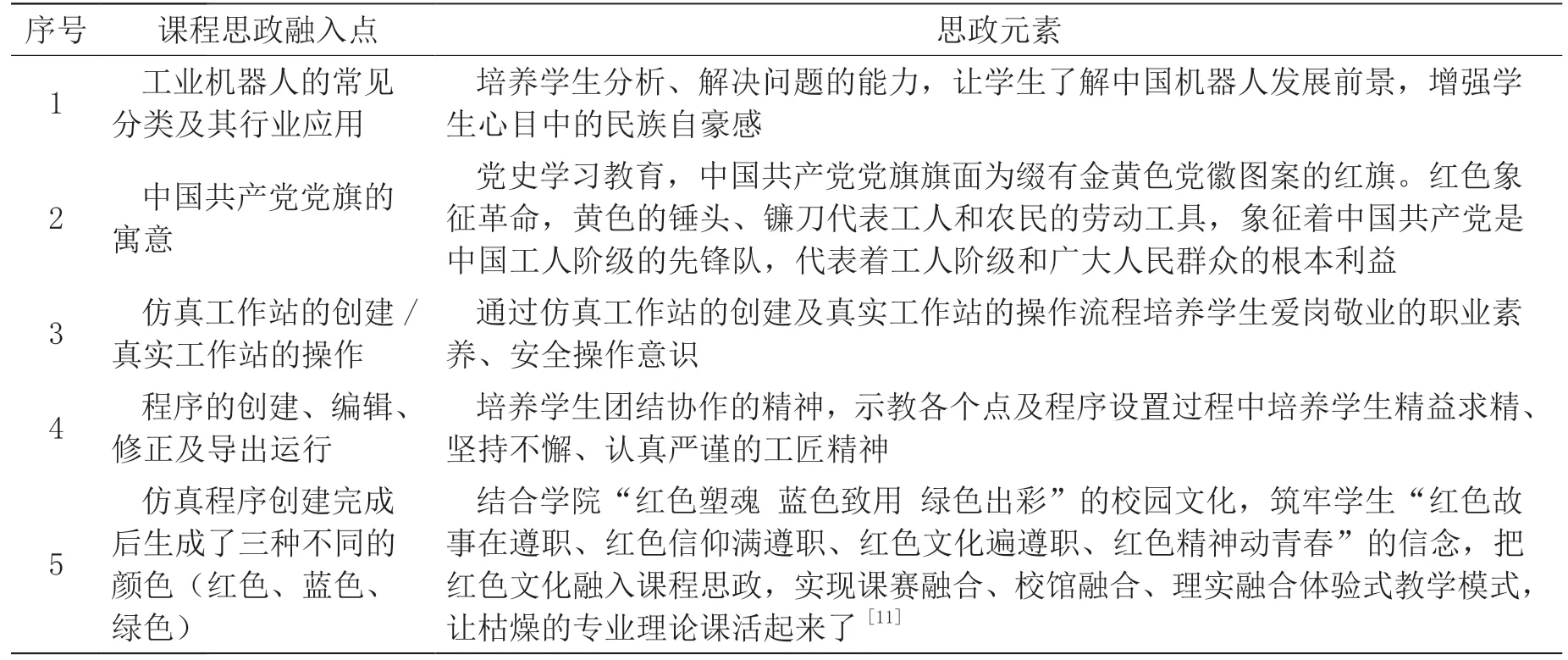
表3 课程内容与课程思政深度融合教学设计表
4.5 实训项目总结
现场示教编程实训实施过程中,动作指令选择是否正确决定运动轨迹的绘制形状;离线仿真编程实训实施过程中,仿真工作站创建、程序设置、程序修正及导出运行等步骤参数设置非常重要,否则将无法完成对应轨迹的绘制功能。
5 结束语
通过工业机器人轨迹绘制实训项目设计,介绍了项目的设备、工作流程、给出了项目目标、实施步骤和评分标准,并对项目进行了总结。在项目实施过程中,采用混合式教学模式不仅能使学生掌握现场程序的创建、程序的编辑、精确示教轨迹点和手动运行程序等理论知识,还能使学生掌握离线仿真工作站创建、轨迹分析和程序设置及修正等实践技能,增强学生独立思考的能力,并在实践中融入课程思政,潜移默化地对学生进行思想政治引导,厚植学生工匠精神、爱国主义精神等,实现课程思政与专业知识协同育人。最后通过现场示教和离线编程两种不同实施流程对比,突显离线仿真编程相比于在线示教编程编写复杂轨迹线的优势,极大地缩短了绘图或写字机器人的工作时间,提高了机器人的使用效率。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02
防爆电机(2021年4期)2021-07-28
黄河之声(2021年8期)2021-07-23
中国特种设备安全(2021年11期)2021-05-05
铁道通信信号(2020年6期)2020-09-21
音乐天地(音乐创作版)(2020年3期)2020-06-09
人大建设(2019年2期)2019-07-13
童话世界(2018年17期)2018-07-30
中成药(2018年2期)2018-05-09
现代企业(2015年7期)2015-02-28