仿生机器蝠鲼动力学建模及试验研究
2024-03-14 03:42陈国军林羊龙
水下无人系统学报 2024年1期
陈国军,林羊龙,金 俊,陈 巍,杨 雪
(南京工程学院 工业中心,江苏 南京,211167)
0 引言
近年来,水下机器人研究逐渐成为热点,其中仿生机器鱼以其水下环境游行适应强的特点受到研究人员的青睐。自然界中,使用胸鳍摆动推进的鱼类在稳定性、机动性、隐蔽性和能耗性等方面都优于其他鱼类。而使用胸鳍摆动推进的鱼类中最具代表性的就是蝠鲼,仿生机器蝠鲼的研究涉及以蝠鲼为原型的仿生结构研究、控制电路设计和运动控制算法研究[1],这些研究能够为研制胸鳍推进类仿生机器鱼提供理论基础。仿生机器蝠鲼独特的胸鳍摆动推进方式能够实现水下滑翔游行,起到节省能耗的作用[2]。因此,更适合风浪干扰环境下作业和水下长航时作业需求。
美国弗吉尼亚大学Chen 等 [3]使用离子交换聚合金属材料(ion-exchange polymer metal composite,IPMC)制作仿生机器蝠鲼胸鳍,通过向智能驱动材料施加一定电压使其产生形变从而获得驱动力[4],实现推进运动。这种方法制作的仿生机器蝠鲼虽然结构看上去很紧凑,但在实现工程应用中会存在驱动力小、控制精度低的问题[5]。
国内不少高校和科研机构也致力于仿生机器蝠鲼的研究,北京航空航天大学选择蝠鲼作为仿生对象,基于生物学特性和运动方式研制了仿生机器蝠鲼Robo-ray I-V。一代样机到五代样机变化的不仅仅是外形,更是仿蝠鲼胸鳍推进方式的改进。在Robo-ray V 中,将胸鳍的可控主动变形与被动柔性变形相结合,较好地实现了功能仿生与形态仿生的结合。
西北工业大学Zhang 等[6]在近年间针对仿生蝠鲼机器人展开了大量设计及研究,设计制作滑扑一体自主变形仿生柔体潜航器,完成了1 025 m深海测试,并针对胸鳍的柔性和形状对仿生蝠鲼机器人水下动力性能的影响展开研究[7],此外还对仿生蝠鲼机器鱼运动姿态仿生相似性进行评估并通过动态时间归整(dynamic time warping,DTW)算法和中央模式发射器(central pattern generators,CPG)网络对运动姿态进行了优化[8]。
哈尔滨工业大学高帅[9]建立了蝠鲼动力学模型,对其运动进行了仿真,并在此基础上开展研制工作。样机主要由外壳、胸鳍推进机构和偏心轮机构等几部分构成。机器蝠鲼胸鳍通过刚性鳍条连接到偏心轮机构上,再由电机带动偏心轮机构转动,从而实现胸鳍推进机构摆动推进。该仿生机器蝠鲼能够实现直行、转弯和逆游功能,但无法实现沉浮功能。
综上,国内外开展的仿生机器蝠鲼研究[10]主要可以分为两大类: 一类是使用IPMC 和形状记忆合金类智能驱动材料[11]来完成胸鳍摆动的机器蝠鲼,另一类是使用电机或舵机来驱动鳍条摆动的机器蝠鲼[12]。使用智能驱动材料驱动,通过施加一定电压使其产生形变从而获得驱动力,这种驱动方式的优点是噪音小、结构简单,但存在驱动能力弱、控制精度低的问题。使用电机或者舵机驱动,驱动力大且控制精度高,但在机器鱼外形结构上仿生效果较差。
针对上述问题,文中通过对蝠鲼仿生学特征的分析,得到蝠鲼游动时胸鳍摆动规律,并根据蝠鲼的胸鳍轮廓得到其外形轮廓曲线拟合函数。通过分析蝠鲼游动特点,建立蝠鲼的运动学模型,以仿生学和建模为基础,完成样机设计,并进行运动试验,验证其可行性与正确性。
1 仿生机器蝠鲼建模与分析
对蝠鲼进行生物学特征分析与建模,分析真实蝠鲼运动特征建立蝠鲼的运动学和动力学模型,可准确模仿蝠鲼运动方式,为仿生机器鱼的系统设计提供理论依据。通过将生物学特性与工程设计相结合,可实现更符合自然运动的仿生效果。
1.1 机器蝠鲼的仿生学特征
蝠鲼身体呈扁平状,一对胸鳍展开后,身体的宽度大于长度,胸鳍长大如翼状,尾巴细长。游行时主要依靠胸鳍发力,尾巴几乎不起作用,因此在研究蝠鲼生物学特征时主要对胸鳍进行分析。蝠鲼的游行主要分为2 种: 左胸鳍和右胸鳍摆动推进模式和滑翔模式,这2 种模式在蝠鲼游行时切换进行。在滑翔模式下蝠鲼左右胸鳍都不摆动,很大程度上节省了蝠鲼体力。当蝠鲼需要前游时,左右胸鳍往往同时发力,做上下摆动,胸鳍摆动的频率决定了蝠鲼游行速度。当蝠鲼需要转弯游行时,左右胸鳍上下摆动频率不同,往哪个方向转弯,相应方向胸鳍摆动频率低一些,甚至出现停止摆动。一般情况下,蝠鲼左右胸鳍的最大摆动角度能达到80°左右。Fish 等[13]对蝠鲼进行水下动力性能研究时,建立如图1 所示的游动胸鳍运动周期图(T代表1 个运动周期),可见胸鳍摆动类似于正弦波的传递。
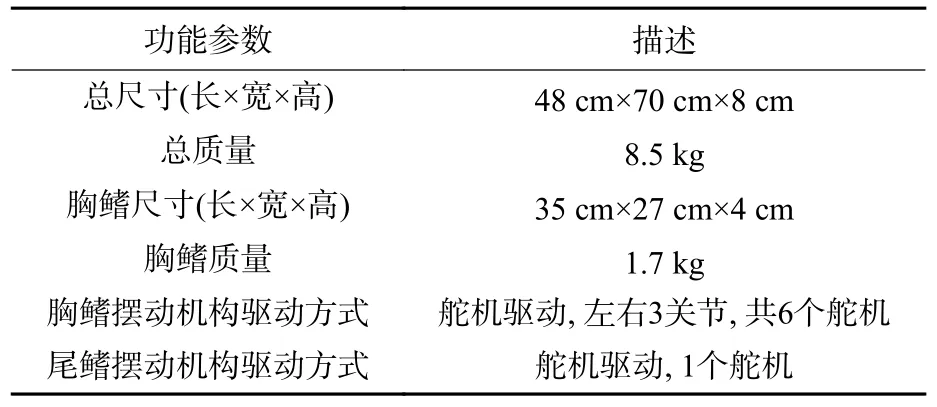
表1 仿生机器蝠鲼相关参数Table 1 Parameters of biomimetic robotic manta ray

图1 游动时胸鳍运动周期图Fig.1 Graph of pectoral fin movement cycle
蝠鲼直线游动时,胸鳍摆动产生行波,行波的传播方向与游动方向相反。此外,在进行上浮下潜游动时,为了调节身体姿态,尾鳍也会有轻微波动。蝠鲼外形呈流线型,有助于在游行时减小阻力,避免游动过程中的能量损耗。
蝠鲼游动时主要依靠胸鳍上下摆动产生推进力,鱼身几乎不产生运动,因此鱼身尺寸及结构可以根据实际控制单元尺寸进行调整,在满足空间需求的情况下尽量减重,因此文中采用空心设计搭配密封舱存放控制单元进行鱼身结构设计。与此同时,蝠鲼细长的鱼尾也不产生主动运动,但与鱼尾根部连接的尾鳍在游动时会产生轻微摆动,用来调节游动姿态。因此,在建立蝠鲼物理模型时主要考虑胸鳍物理模型的建立。
蝠鲼胸鳍的形状可以通过高斯曲线拟合得到,对如图2 所示真实蝠鲼的胸鳍轮廓进行高斯曲线拟合,根据真实蝠鲼的胸鳍轮廓和尺寸得到其外形轮廓曲线拟合函数
式中:f(xl)为胸鳍宽度;xl为胸鳍长度。
1.2 运动学模型
构建蝠鲼运动学模型时主要考虑胸鳍摆动运动,首先建立与鱼身相关的空间运动直角坐标系。Bianchi 等[14]在设计一种用于海底探测的机器蝠鲼时,建立如图3 所示的运动坐标系。其中x轴沿鱼身方向指向鱼尾,y轴垂直于鱼身方向朝上,z轴按右手螺旋法则得到。通过胸鳍上下摆动时任意点在运动学模型坐标系中的变化来发现其运动规律,完成蝠鲼运动学模型的构建。

图3 运动学模型坐标系Fig.3 Coordinate system of kinematic model
通过生物学特征分析,将胸鳍运动时的形状视为正弦曲线。因此,在建立运动学模型时,将胸鳍沿鱼身方向即在x轴上的变化规律用正弦函数进行拟合。胸鳍上下摆动的幅度可映射到垂直于鱼身方向,即y轴上,z轴反映胸鳍上下摆动幅度的纵向变化规律,摆动幅度随z轴改变,且越靠近胸鳍边缘,摆动幅度越大。胸鳍变形规律可以描述为
式中:xj、yj和zj为胸鳍上任意一点的x、y、z坐标;f为胸鳍摆动频率;λ为行波波长;t为胸鳍摆动时间;为沿z轴方向的振幅扩大因子。由此可知,可以通过改变胸鳍摆动频率和行波来改变蝠鲼游动状态。
1.3 动力学模型
当蝠鲼鱼身和胸鳍悬浮在水下,并以一定速度游行时,设蝠鲼沿x、y轴的速度分别为vx、vy。沿z轴涉及偏航运动,其动力学模型不予考虑。由于蝠鲼的游行速度不是很高,因此可忽略沿不同轴方向的速度间的耦合。导出蝠鲼的速度方程为
式中:FX为作用于x方 向的力;FY为作用于y方向的力;mg为蝠鲼质量;Iz为沿z轴的有效转动惯量;Mz为沿z轴的转动力矩;d为旋转中心到蝠鲼重心的距离;mx,my,Ir和Ig为水动力参数。周围流体对蝠鲼的影响可以用水动力参数来描述,即
式中: ρ为水的密度;D为蝠鲼的宽度;L为蝠鲼的长度;m11、m22和m66是椭球体的无量纲附加质量系数。
作用在x和y方向上的总力可以通过参考向上的阻力和推力得到,即
式中:Txr、Tyr分别为作用于蝠鲼右鳍x轴和y轴的推力;Txl、Tyl分 别为作用于蝠鲼左鳍x轴和y轴的推力;FD为作用在蝠鲼上的阻力;FL为作用在蝠鲼上的升力。MH、MD分别为施加在蝠鲼身体中心的水动力力矩和阻力力矩;其中
式中:Cd为阻力系数;CL为升力系数;V为蝠鲼的速度;S为蝠鲼与水接触的表面积;γ为蝠鲼速度V和x轴之间的角度。
作用于蝠鲼身体中心的水动力力矩MH可表示为
式中:rcr为从蝠鲼身体中心到右鳍的矢量;rcl为从蝠鲼身体中心到左鳍的矢量。
作用于蝠鲼身体中心的阻力力矩MD可表示为
式中:Cm为阻力系数;ωz为蝠鲼沿z轴的角速度。
2 仿生机器蝠鲼系统设计
在蝠鲼的运动学和动力学模型建立基础上,将理论依据转化为实际设计方案,完成仿生机器蝠鲼的机械结构和控制系统设计。机械结构设计方面,在蝠鲼生物学特征基础上设计机械结构。控制系统设计方面,从蝠鲼胸鳍正弦摆动方式入手,选择合适控制器、驱动器和传感器设计控制系统,实现机器蝠鲼胸鳍推进功能。通过将理论模型与实际设计相结合,更好地模仿自然界蝠鲼的运动方式,符合运动特性。
2.1 机械结构设计
仿生机器蝠鲼结构设计的目的在于使所设计的结构能够完成像真实蝠鲼一样的游动动作。因此,在设计机器蝠鲼结构时,不仅是外形上的模仿,相关机构的运动还要能够达到真实蝠鲼胸鳍推进的效果,能够完成直线前游、原地转弯和动态沉浮等功能。与此同时,机器蝠鲼的结构设计还要考虑控路的防水问题以及结构材料的选择。
仿生机器蝠鲼的整体结构设计从仿生学角度出发,使用胸鳍摆动机构作为胸鳍骨架对应真实蝠鲼软骨;使用柔性软胶作为胸鳍肌肉对应真实蝠鲼鱼体肌肉;使用变形柔性表皮作为胸鳍表皮对应真实蝠鲼皮肤。设计出的仿生机器蝠鲼既能保证外形上与真实蝠鲼相像,又能实现与真实蝠鲼一样的胸鳍推进游动。
图4为仿生机器蝠鲼整体结构图。图4(a)是内部结构图,主要包括鱼身结构、胸鳍摆动机构和尾鳍摆动机构。其中,鱼身机械结构内还包括重心调节机构和防水密封电路仓。图4(b)是实物外观图,是在内部结构上装上了一对由软胶材料制作的柔性胸鳍形成的最终仿生机器蝠鲼样机。
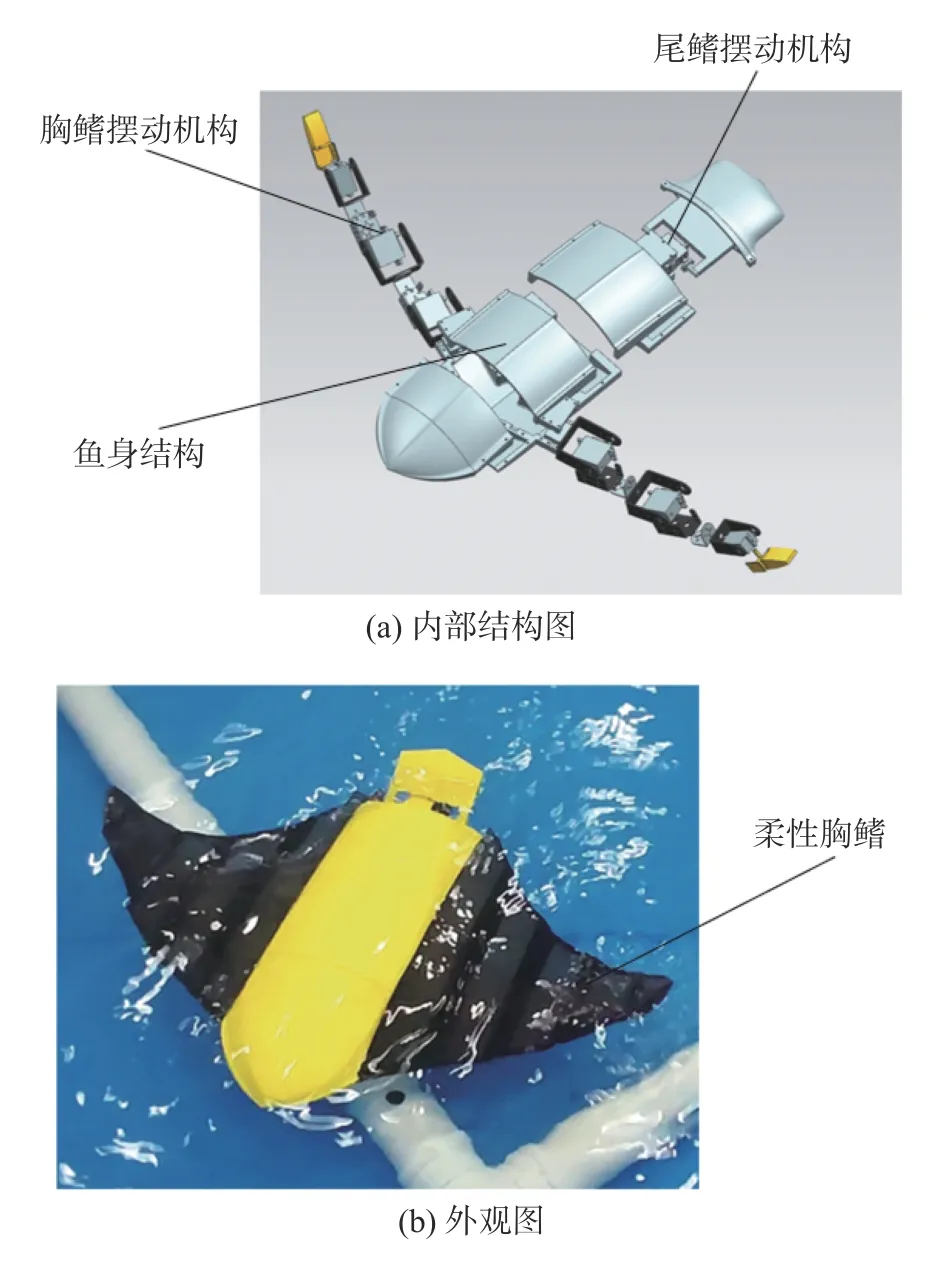
图4 仿生机器蝠鲼整体结构图Fig.4 Overall structure of biomimetic robotic manta ray
鱼身结构在模仿蝠鲼外形的前提下,采用分段结构,以便重心调节机构和防水密封电路仓的拆装。机器蝠鲼胸鳍摆动机构采用多关节摆动机构实现,使用舵机进行驱动,左右胸鳍共需6 个舵机,通过控制舵机摆动的角度模拟真实蝠鲼胸鳍的摆动。针对电机及舵机驱动存在仿生效果差的缺点,文中采用多关节舵机设计,引入柔性胸鳍蒙皮,柔性材料与舵机之间为非完全贴合设计,柔性蒙皮外表面呈现连续曲线过渡,提高了仿生效果,成功模拟了蝠鲼胸鳍的基本运动特征。机器蝠鲼的尾鳍摆动机构主要用于调节机器蝠鲼在实现动态沉浮游动过程中的姿态,使用1 个舵机进行驱动。整条仿生机器蝠鲼长48 cm,宽70 cm,高8 cm,重约8.5 kg。其相关参数如表1 所示。
2.2 控制系统设计
仿生机器蝠鲼的控制系统设计如图5 所示。系统分为水面控制台、主控单元和从控单元3 个部分。水面控制台主要由PC 机或者手机及其配套的应用软件组成。主控单元选择树莓派作为主控制器,外接蓝牙模块、水质传感器、陀螺仪和全球定位系统(global positioning system,GPS)模块。从控单元选择Arduino 作为从控制器,外接全防水舵机,步进电机驱动器和避障传感器。水面控制台可以通过无线蓝牙或者虚拟网络控制台(virtual network console,VNC)远程连接与主控单元进行通讯,主控单元与从控单元之间通过控制器局部网(controller area network,CAN)总线进行通信。

图5 仿生机器蝠鲼控制系统Fig.5 Control system of biomimetic robotic manta ray
水面控制台可以选择PC 机或者手机。PC 机使用Windows 操作系统的VNC 远程连接功能对树莓派进行远程控制。手机使用安卓操作系统,安装蓝牙串口调试应用软件对树莓派进行远程控制。
主控单元中,主控制器树莓派通过串口与蓝牙模块和GPS 模块进行连接,通过集成电路总线(inter-integrated circuit,IIC)接口与 陀螺仪 进行连接,通过模拟或数字(analog or digital,AD)采集口与水质传感器进行连接。主控单元使用2S 锂电池直接供电。
从控单元中,从控制器Arduino 通过脉冲宽度调制(pulse width modulation,PWM)信号发生引脚与全防水舵机进行连接,通过输入/输出(input/output,I/O)口与避障传感器和步进电机驱动器进行连接。使用2S 锂电池供电,不过不是直接供电,而是通过主控的通用串行总线(universal serial bus,USB)口进行供电。全防水舵机还要通过升压模块升压后进行供电。
3 仿生机器蝠鲼运动试验
通过水下运动试验,验证仿生机器蝠鲼在复杂环境下的性能。试验内容为模拟波浪干扰环境下的直线前游、原地转弯和动态沉浮试验。并通过仿生机器蝠鲼本体携带的陀螺仪实验数据变化情况进行分析验证。
3.1 直线前游试验
有波浪干扰下仿生机器蝠鲼直线前游性能如图6 所示。可以看出,在有波浪干扰下直线前游过程中,仿生机器蝠鲼的俯仰角、滚转角和偏航角基本在0°上下波动且波动很小。表明即使是在有波浪干扰的情况下,其依然能够实现直线前游运动且性能良好。

图6 有波浪干扰下直线前游试验陀螺仪数据Fig.6 Gyroscope data for straight-line forward test under wave interference
3.2 转弯运动试验
有波浪干扰下仿生机器蝠鲼原地转弯性能如图7 所示。可以看出,仿生机器蝠鲼在进行有波浪干扰下原地转弯游行试验过程中,俯仰角和滚转角基本在0°上下波动且波动很小,偏航角从0°开始逐渐增加,但随时间逐渐增加的变化关系依旧近似线性关系。表明仿生机器蝠鲼依然能够稳定完成原地转弯运动。

图7 有波浪干扰下原地转弯试验陀螺仪数据Fig.7 Gyroscope data for in-situ turning test under wave interference
3.3 动态沉浮试验
有波浪干扰下仿生机器蝠鲼上浮游动性能如图8 所示。可以看出,仿生机器蝠鲼在有波浪干扰下上浮游动中,滚转角和偏航角基本在0°上下波动且波动较小,俯仰角从0°开始逐渐增加到45°左右,然后再逐渐减小到0°,表明仿生机器蝠鲼从鱼身倾斜到完成上浮游动的整个过程性能良好。

图8 有波浪干扰下上浮游动试验陀螺仪数据Fig.8 Gyroscope data for floating test with wave interference
有波浪干扰下仿生机器蝠鲼下沉游动性能如图9 所示。可以看出,仿生机器蝠鲼在有波浪干扰下下沉游动中,滚转角和偏航角基本在0°上下波动且波动较小,俯仰角从0°开始逐渐减小到-40°左右,然后再逐渐增加到0°,表明仿生机器蝠鲼从鱼身向下倾斜到完成下沉游动的整个过程性能良好。
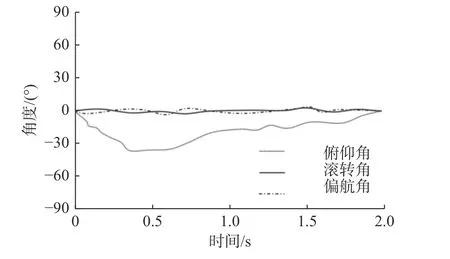
图9 有波浪干扰下下沉游动试验陀螺仪数据Fig.9 Gyroscope data for sinking test under wave interference
最终,仿生机器蝠鲼运动试验结果如图10 所示,根据仿生机器蝠鲼的直线前游试验、转弯运动试验以及动态沉浮试验数据,可见即使是在有波浪干扰的情况下,仿生机器蝠鲼的运动性能均表现良好,验证仿生机器蝠鲼的稳定性、机动性和适应性,证明了在水下工程中的应用潜力。
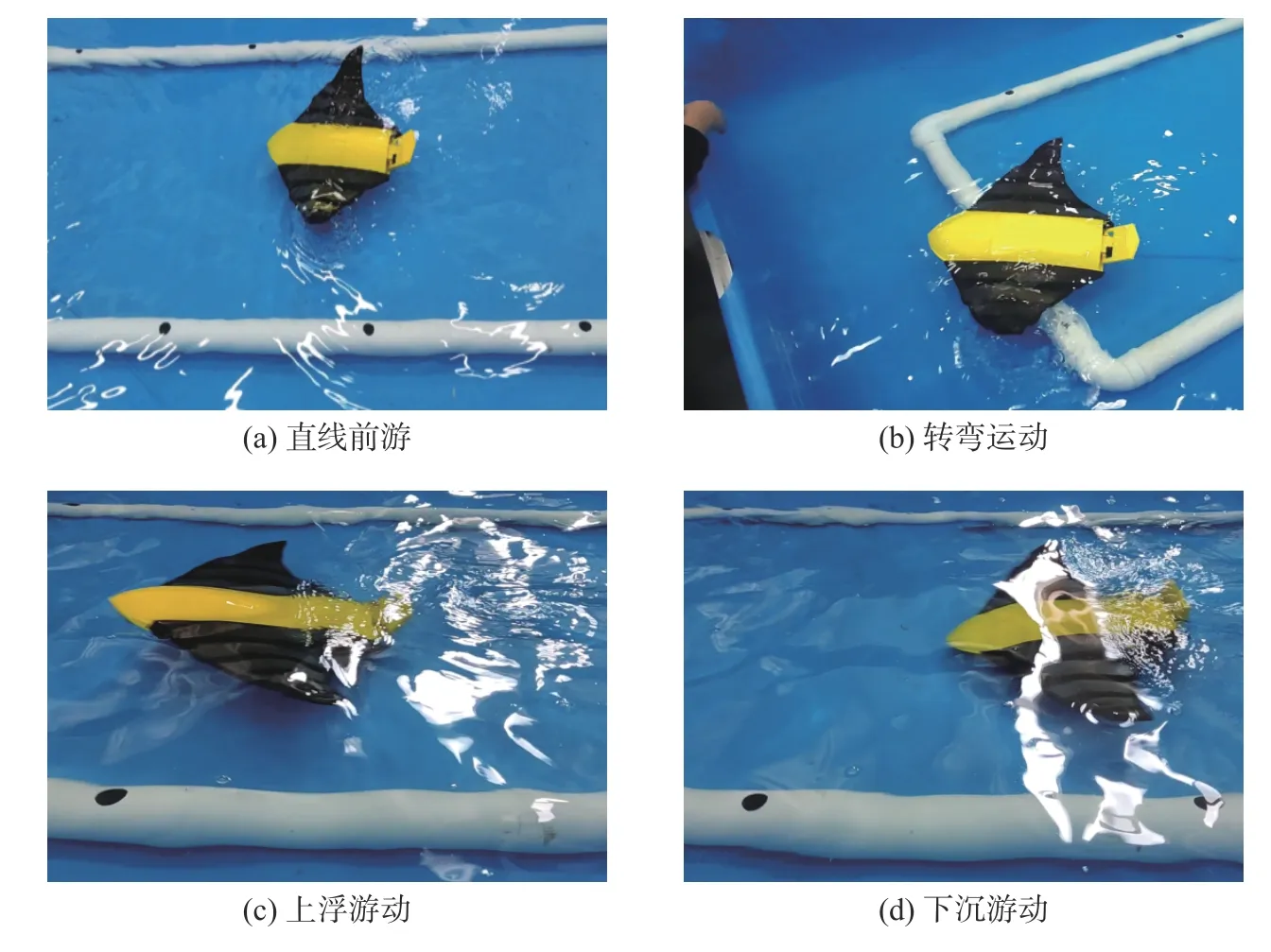
图10 仿生机器蝠鲼运动试验Fig.10 Movement test of biomimetic robotic manta ray
针对仿生机器蝠鲼运动续航能力进行测试,选取深圳潜行科技的GLADIUS MINI 和约肯机器人的BW Space Pro 水下机器人,均将电源更换为与文中所设计的仿生机器蝠鲼相同容量2 200 mAH的2S 锂电池进行续航测试试验,结果见表2。文中所设计的仿生机器蝠鲼相较于其他2 款水下机器人,续航时间提升约30%。

表2 续航测试试验数据Table 2 Data of endurance test
4 结束语
文中以蝠鲼为仿生对象,分析其仿生学特性。通过对蝠鲼游动特征的分析,建立了蝠鲼的运动学模型和动力学模型,依据生物学特性和建立的数学模型设计了仿生机器蝠鲼样机,并对所研制的仿生机器蝠鲼样机进行运动试验,验证了运动控制模型的可行性与正确性。针对在水下机器人应用中至关重要的能耗问题,通过指标对比试验,表明文中设计的仿生机器蝠鲼能耗较传统螺旋桨驱动的水下机器人降低了30%。下一步将继续优化仿生机器蝠鲼外形,使其更符合流线型设计,从而减小水中阻力,提高续航能力,降低能耗效率,实现在复杂水下环境下执行长航时任务。
猜你喜欢
少儿画王(3-6岁)(2023年4期)2023-06-28
散文诗世界(2022年3期)2022-03-21
哈尔滨轴承(2021年1期)2021-07-21
小学科学(2020年11期)2020-03-04
养生保健指南(2017年8期)2017-12-09
船舶力学(2017年5期)2017-06-05
科学Fans(2017年3期)2017-04-13
特别健康·上半月(2016年6期)2016-10-21
传奇故事(破茧成蝶)(2015年4期)2015-01-09
天津诗人(2014年4期)2014-11-14