人体下肢多体动力学仿真和步态稳定性实验研究*
2024-03-09 01:34张凯璐何帅恒赵紫雅张雪玲林飞李佳任武
生物医学工程研究 2024年1期
张凯璐,何帅恒,赵紫雅,张雪玲,林飞,李佳△,任武△
(1.新乡医学院第一附属医院,新乡 453003;2.新乡医学院 医学工程学院,新乡 453003;3.河南省神经传感与控制工程技术研究中心,河南省医学VR智能传感反馈工程研究中心,新乡市智能康复设备工程技术研究中心,新乡 453003)
0 引言
行走是人们日常生活中最主要的运动方式,步态是人类步行的行为特征[1]。骨骼、肌肉和关节韧带等组织通过神经系统的调控,共同维持人体的运动平衡。脑卒中患者由于中枢神经系统病变,导致下肢肌肉肌无力,严重影响运动能力[2]。调查发现,下肢运动功能障碍者康复后,虽然具有行走能力,但其稳定性和平衡性较差。传统的三维运动捕捉方法无法对人体下肢行走时的内部特性进行分析,因此,基于生物力学理论建立的人体步态仿真模型是现阶段探究步态变异内在诱因,揭示行走过程中维持稳定机理的重要方法。通过该方法对人体步态进行仿真分析,从肌肉力、关节力矩等生物力学角度深入分析步行时的步态特点,进一步了解人体运动机制,可为后续仿真机器人等研究提供研究基础。
本文总结和阐述了人体下肢多体动力学仿真及步态稳定性的研究进展,展望了其发展趋势,以期为临床康复治疗及康复设备的设计与开发,提供帮助与数据支持。
1 人体多体动力学仿真研究
多体系统动力学研究开始于20世纪60年代,经过多年的发展,该系统研究已趋于成熟。多体系统动力学主要通过不同的约束方式将多个物体组成多体系统,研究其运动规律。多体系统动力学系统又分多刚体系统和多柔体系统动力学两大类。
1.1 多刚体动力学仿真
人体结构十分复杂,随着科学技术的发展,多体动力学技术逐渐应用于人体研究。在对人体步态的仿真研究中,为简化模型、减少计算程序,研究者们通常将人体简化成一个多刚体系统,利用多刚体系统动力学理论研究人体运动规律,预测人体行为。Fasser等[3]基于Matlab程序通过注释EOS图像(双平面X射线图像)建立了个性化脊柱多刚体模型,可用于研究相关临床问题。Hanavan15刚体模型是常用的多刚体模型之一,关节处采用球形铰方式连接。Onyshko等[4]建立了拉格朗日力学数学模型,可模拟人的步态,但在关节的自然韧带约束以及脚细分方面还需进一步改进。Seth等[5]研究了一种可用于深入了解病理步态和跑步过程中肌肉功能的行走模型。Tashman等[6]开发了一个3D 4段8自由度的模型,准确再现了往复式步态矫形器(reciprocating gait orthosis,RGO)辅助截瘫步态的重要动力学。在国内,周晓东等[7]将人体建模为12自由度连杆系统,开发了一种可模拟和可视化步态中绊倒障碍物后,肌肉松弛跌落过程中身体的运动分析模型,首次尝试模拟了人类步态过程中的跌倒。秦瑞瑞等[8]通过建立16刚体虚拟人体运动控制模型,仿真分析了行走过程中人体的受力情况。杨楠等[9]利用SolidWorks和ADAMS软件建立符合实际条件的步态运动模型,简化了人体模型和约束分析,通过STEP函数驱动模型进行运动仿真,以研究腿部运动轨迹和足底压力变化的特点,仿真数据为日后步态识别和机器人研究提供了一定的理论基础。随着机器人技术的发展,多体动力学仿真技术在人体外骨骼机器人的应用越来越广泛。魏强生等[10]通过D-H法和拉格朗日法对外骨骼机器人单侧下肢进行了运动学和动力学仿真分析,验证了下肢外骨骼机器人的稳定性和有效性。王文远等[11]基于动作捕捉技术、几何法和位姿分离法设计了下肢7自由度的仿人机器人运动学模型,该模型不仅具有更好的灵活性,还能在任意平面内运动,为后续机器人研究奠定了理论基础。针对有上肢功能障碍康复需求的患者,栾晓燕等[12]设计了一款三自由度的上肢康复机器人,通过对机器人的运动学仿真分析和运动轨迹规划仿真,验证了该上肢康复机器人结构的合理性,为后续康复机器人的控制优化奠定了基础。建立刚体模型时,研究者们通常不考虑人体各部位的解剖形态,将身体简化为几个部位。罗小美[13]在建立人体动力学模型时,认为把人体前臂看成一块刚体研究不合理,将前臂根据桡尺骨分为两个刚体,深入全面地研究了快速翻掌产生的前臂惯量和受力情况。Zelik等[14]强调了在步态分析中纳入足部力量的重要性,指出将整个脚视为单个刚体是不正确的。有研究表明,跖趾关节对人体步态稳定性有着显著影响[15]。

图1 Hanvan15刚体模型[17]
此外,许多研究在建立运动模型时,将身体柔性组织考虑在内。刘雷等[16]运用多体系统动力学的建模方法建立了17刚体、55自由度的人体动力学模型,充分考虑了人体颈部和下躯干的柔性效应。徐志伟等[17]通过逆向工程学技术结合人体解剖学数据对人体进行模型重构,建立了13个刚体的人体模型,并将足部进行柔性化处理,比较了两者足地接触力的差别。
综上,基于多刚体理论在人体步态分析的研究中已趋于成熟。随着技术的发展,人体柔性组织在人类运动生活中占据重要位置。有研究在Matlab环境中运用逆动力学方法开发了一种用于步态运动的多体模型,在运动学分析中,通过模拟肌肉在骨表面上的测地线包裹进行建模,而肌肉动作通过Hill肌肉模型来公式化[18]。
1.2 基于肌骨模型的多体动力学仿真
随着近年来运动生物力学的蓬勃发展,人体肌骨系统的动力学仿真技术取得了进步,肌骨模型已广泛应用于临床医学研究、人机工程等领域。人体是一个复杂的刚柔耦合系统。其中,骨骼、肌肉和关节连接,组成人体的肌肉骨骼系统,又称肌骨系统。与多刚体动力学仿真技术相比,基于肌骨模型的多体动力学仿真技术是基于Hill肌肉模型,针对人体运动的仿真技术。肌骨多体动力学系统在步态分析、临床手术规划领域得到了广泛应用。Kebbach等[19]建立了全膝关节置换术后下肢肌肉骨骼模型,研究结果从生物力学角度支持了骨科手术中髌骨组件的定位,该模型将来或可作为膝关节置换术前的分析工具。
常用的肌骨模型建模仿真软件有开源软件OpenSim和丹麦的多体动力学仿真软件Anybody等。其中,斯坦福大学的Delp教授团队开发的全人体模型是目前最具代表性的肌骨模型[20]。
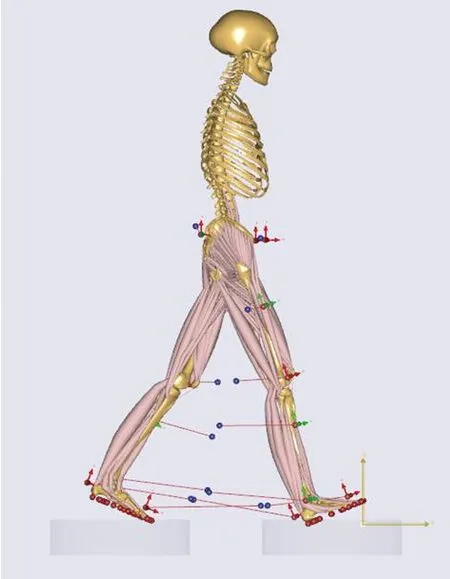
图2 下肢肌骨模型
陈瑱贤等[21]基于通用模型建立了全膝关节置换的骨肌多体动力学模型,模拟研究了6种后稳定型全膝关节假体在走路、右转和下蹲 3种生理活动下的生物力学差异,为临床治疗提供了理论支撑。肌肉骨骼建模研究大多基于通用模型进行修改,以大致匹配个体的人体测量。但有研究指出,通用模型忽略了个体之间的显著差异[22]。
陈夕辉等[23]通过建立个体化先天性髋关节发育不良(developmental dysplasia of the hip,DDH)患者全髋关节置换( total hip arthroplasty,THA) 下肢骨肌多体动力学模型,和不同偏心距下股骨S-ROM 假体动态有限元模型,研究探讨了DDH患者 THA 中股骨偏心距改变的影响。在临床上,临床医生利用个体化模型可最大限度地模拟患者情况,对诊疗有重要作用。此外,大多数多体动力学软件具有有限元输出接口,可将肌肉力、力矩等仿真结果作为边界条件输出,加载到有限元仿真分析中。Peng等[24]开发了一种受试者特定的肌肉骨骼多体(MSK)驱动的有限元足部模型,研究了5种中/后足关节病在步行条件下对内足负荷的生物力学影响,该模型可提供站立阶段的特定边界条件,了解特定受试者扁平足畸形干预中的中/后足手术治疗的生物力学特性。罗林聪等[25]将骨肌多体动力学技术与有限元法相结合,实现了肘关节屈曲运动过程中肱骨应力、位移的连续动态分析。崔伟玲等[26]将多体动力学理论和有限元法相结合,通过构建全膝关节置换术后患者的个性化下肢模型,研究分析了内推式和弹跳式两种步态对术后患者恢复的影响。Calero等[27]将中耳有限元模型简化为不同多体模型,并分析了模型的简化效果,得出活塞式运动和镫骨踏板绕另外两个正交轴的两次旋转,保留了模态阵型和阶数,能很好地反应人体中耳动力学。多体动力学仿真与有限元方法结合可对人体节段内部应力、应变等信息进行较为精确的模拟,促进人体运动现象和规律的研究[28]。
2 步态稳定性实验研究
步态不稳是跌倒的风险因素,其中髋部骨折是跌倒中常见的损伤,调查发现超过90%的髋部骨折由跌倒引起[7]。尤其随着年龄增长,中老年人的神经系统以及骨质等各方面出现退化,对周围环境的反应及身体的调节能力下降,其步态不稳时,很容易发生跌倒伤害,严重时危及生命。
王新亭等[29]研究分析了老年人手提重物时,在不同步态停止方式(急停和有计划停止)下,下肢运动动力学参数的变化。结果表明,老年人为应对负重和急停带来的不稳定性,下肢会产生相应的平衡机制。Hossein等[30]研究分析了15名健康青年人受扰动前后不同手臂条件和行走条件对步态参数的影响,研究中受试者在正常、束缚和释放三种条件下,进行对称和不对称行走,行走时进行绊倒和滑倒干扰。研究发现,意外扰动对大多数步态变量有影响,手臂运动在中等程度的扰动中贡献不大。
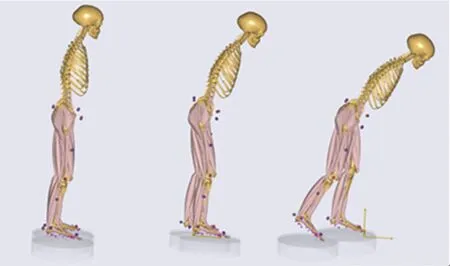
图3 站立受扰仿真
双任务范式是日常生活中常见的生活场景,在行走或上下楼梯时,进行认知或身体任务将分散运动时的注意力。有研究表明,上、下楼梯时执行双任务将会导致步速下降,且步速越大,人体动态稳定性越低[31]。杨凤娇等[32]对双任务下老年人和年轻人的步态特征进行了比较分析,研究结果为老年人增强步行能力,降低跌倒风险提供了理论建议。Lin等[33]比较了有多发性硬化(multiple sclerosis,MS)和无多发性硬化者在水平行走时的动态步态稳定性,研究了MS对动态步态稳定性的影响。日常生活中,人们走在不同坡度的地面以及采取不同的摆臂方式,身体机能会产生不同的控制策略。杨子涵等[34]研究了男性青年在不同坡角上下坡行走时的步态控制策略。Punt等[35]探讨了不同的摆臂方式对步态稳定性的影响,利用Xsens运动捕捉系统捕捉了10名健康男性志愿者在7种不同步态速度下,按照4种不同摆臂动作指令行走时的运动学参数。研究发现,手臂过度摆动会显著增加人体步态的局部动态稳定性,但由于该研究的志愿者比较单一,手臂过度摆动是否会影响老年人等易跌倒人群的步态稳定性,需进一步研究。
人类在行走过程中发生头部转动时,由于视野远离行进方向以及前庭系统检测头部运动的负担增加,头部转向改变了视觉和前庭信息,可能引起步态或稳定性的变化。行走过程中的稳定性依靠多系统、多感觉的信息整合以产生适当的运动反应。相关的肌肉或神经损伤会直接影响人体的平衡能力,从而影响人的步态稳定性。在行走过程中,头部转动时,步态稳定性是否与年龄相关,仍不清楚。Fitzgerald等[36]研究比较了年轻人和老年人在行走时,转头期间和之后的步态稳定性。与年轻人相比,年龄不会影响健康老年人在转头过程的步态稳定性,而且老年人的骨盆旋转速度越大,头部相对躯干旋转的趋势越小。在临床和实验室中用于评估平衡控制的方法很多,每种方法都有各自的优缺点。其中,Tinetti性能导向移动能力评估、动态步态指数和伯格平衡量表是临床中用于评估平衡机制的量表评估法。量表法简便易操作,但三种方法具有主观性,并且在前庭功能障碍和卒中后偏瘫患者中都显示了高限效应,测评结果不够精确。成霞等[37]采用串口通讯和QT技术设计了一种能实时检测人体重心位置并评估人体平衡能力的新系统。该系统将传统评价指标与平均差和方位差结合,并利用平衡测试仪器评估测试者的平衡能力,能客观、定量、精确地评估人体静态条件下的平衡能力。实验室中评估平衡机制常用的方法有稳定性裕度和全身角动量两种。全身角动量是深入了解健康人和行动不便者维持动态平衡潜在机制的有力工具[38]。

图4 站立受扰平衡恢复实验
关于步态稳定性的研究,研究者已经从不同年龄、不同路况及不同步行姿态等方面探究其对人体运动过程中稳定性的影响。但由于人体结构复杂,传统的稳定性实验大多采用标记点的方式进行运动捕捉研究,无法对人体内部关节力、力矩深层肌肉力进行无创测量,因此,实验与建模仿真相结合可更深入地研究人体稳定恢复过程中的内在机制,辅助临床治疗。同时,偏瘫等运动功能障碍患者经过康复训练后,一部分可以恢复行走能力,但其平衡控制能力及平衡恢复过程中,下肢内在机理与正常人的差异性研究较少,需要进一步探索。
3 总结与展望
本文重点介绍了人体步态稳定性的实验研究现状,以及多刚体动力学系统和肌骨系统在步态分析方向的仿真模拟研究进展,指出了未来下肢多体动力学的发展趋势:
(1)关节韧带等人体柔性组织在运动中扮演着不可或缺的角色。在人体运动研究中,大多将人体简化成刚体,忽略人体柔性部位的影响。因此,在对人体运动过程建模仿真中,将人体柔性结构考虑在内是目前以及未来的研究方向。
(2)由于人体结构十分复杂,随着科技的进步以及科研的需求,肌骨模型建模将向更精确的方向发展。
(3)目前研究人员进行仿真的大多是通用模型。但由于个体差异,个体化建模将是未来的发展趋势,以解决个性化无创在体测试的困难。
(4)需要增加下肢步态运动异常研究的样本量,完善不同异常类型的下肢动力学模型数据库,为人类健康提供数据支持。
猜你喜欢
科学大众(2024年5期)2024-03-06
科学导报(2023年79期)2023-12-01
昆明医科大学学报(2021年8期)2021-08-13
中国民间疗法(2021年7期)2021-07-22
高师理科学刊(2020年2期)2020-11-26
中国毕业后医学教育(2020年3期)2020-01-19
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
北京航空航天大学学报(2017年1期)2017-11-24
物理实验(2015年10期)2015-02-28