
改进型三斜叶-Rushton组合桨槽内流场特性的粒子图像测速技术
2024-03-05 06:28:44王家成陶兰兰郭海锋周勇军
青岛科技大学学报(自然科学版) 2024年1期
王家成,陶兰兰,郭海锋,周勇军*
(1.南京工业大学 机械与动力工程学院,江苏 南京 211816;2.江苏省特种设备安全监督检验研究院 国家化工设备质量监督检验中心,江苏 苏州 215600)
搅拌操作作为过程工业的基本单元操作是化工反应过程的重要环节,其原理涉及流体力学、传热、传质及化学反应等多种过程,搅拌过程就是在流动场中进行动量传递或是包括动量、热量、质量传递及化学反应的过程[1-2]。在反应过程中搅拌器的结构形状直接影响产品的生产效率和质量[3-4]。因此新型搅拌器的流场特性研究对反应工程实践起着重要的参考作用[5]。
粒子图像测速(PIV)技术对流场的测量具有很好的稳定性,适用于工程应用的等比例缩小的实验测量,因此反应釜的流场特性常采用PIV 技术进行研究[6-8]。杨娟等[4]在非牛顿流体中考察向心桨、Rushton桨、三斜叶桨相互组合后的混合效果,结果表明在单位体积功耗相等的情况下,高剪切的Rushton桨与强循环的斜叶桨组合的混合效果最高。周勇军等[9]利用PIV 实验对二斜叶框式组合桨进行了流场分析,结果表明随着离底距增大,底部流场强度减弱不利于物料混合,同样随着桨间距的增大两桨叶间的对流减弱也不利于物料混合。FAN 等[10]利用PIV 实验方法研究了挡板对四斜叶桨搅拌流场的影响。试验结果表明随着挡板的增加,叶轮下方独立循环面积发生变化,主体发生大规模对流,搅拌诱导的非相关流动结构分布范围更广。WANG 等[11]研究了双四斜叶桨和单四斜叶桨在方槽中的流场变化情况,结果表明单个桨叶产生的高速区是有限的,双桨叶使得搅拌槽内的高速区域更大,这加强了搅拌槽内的质量和动量交换。
上述文献对斜叶桨和Rushton 桨的研究有所涉及,但是未涉及对改进型三斜叶-Rushton组合桨的研究。本工作利用PIV 技术对改进型三斜叶-Rushton组合桨槽内流场进行研究,通过实验分别研究了转速N=80、100、120、140 r·min-1,离底距C1=0.23H、0.26H、0.3H和桨间距C2=0.22H、0.25H、0.29H时槽内流场的情况,通过对速度分布图的分析选择最佳工况,以期为工程应用提供参考。
1 实验部分
1.1 实验装置
实验过程中为减小光的折射所带来的误差,在搅拌槽的外部加一个透明有机玻璃储水方槽,如图1(a)所示。搅拌槽是由厚度6 mm 的透明树脂玻璃周壁以及不锈钢标准椭圆形封头组成,下层桨叶离底距为C1,两桨叶间距为C2,实验中调节C1、C2来研究组合桨槽内流场特性,其结构模型图如图1(b)所示,方槽与搅拌槽内的液体液位保持一致。储水方槽和搅拌槽的结构尺寸见表1所示。

表1 储水方槽及搅拌槽结构尺寸Table 1 Structure dimensions of water storage square tank and stirred tank/mm
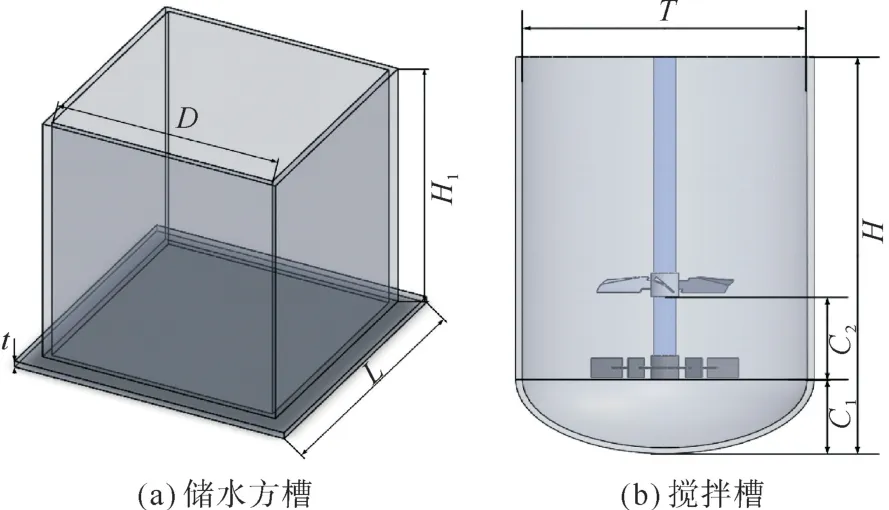
图1 储水方槽及搅拌槽结构模型Fig.1 Structural model of water storage square tank and stirred tank
实验所用组合桨为改进型三斜叶桨和Rushton桨,如图2所示。上层桨为改进型三斜叶桨,由3个折叶片和轮毂组成,叶片平均分布且与轮毂竖直轴线夹角呈45°,改进后的叶片前端部分折弯,夹角为160°,轮毂高40 mm,通过六角头螺栓固定在轴上。下层桨叶为Rushton桨,由1个轮盘、6个直叶片和轮毂组成,轮盘位于轮毂中段,6个直叶片竖直均布在轮盘上,轮毂高度和固定方式与改进型三斜叶桨相同。搅拌桨结构尺寸如表2所示。
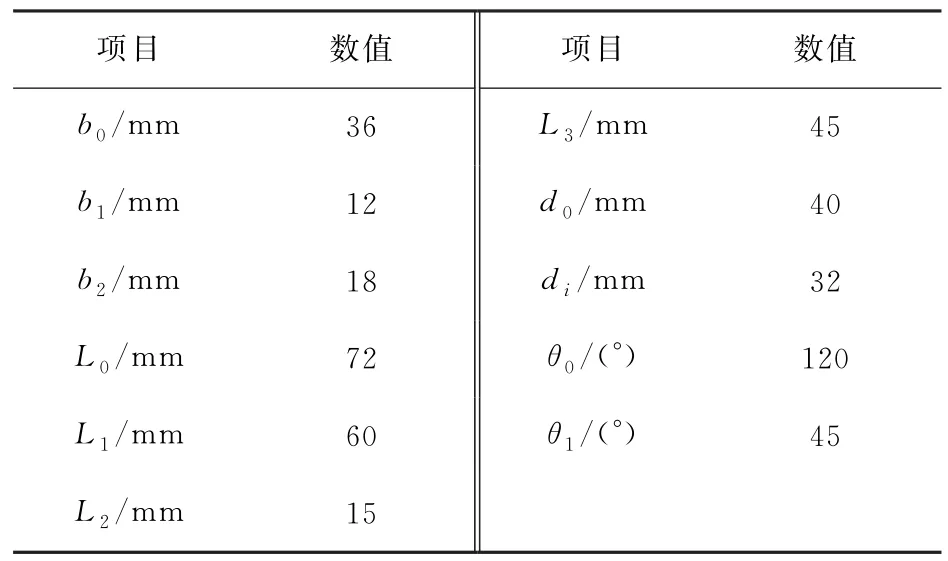
表2 搅拌桨结构尺寸Table 2 Structure dimensions of stirring impeller
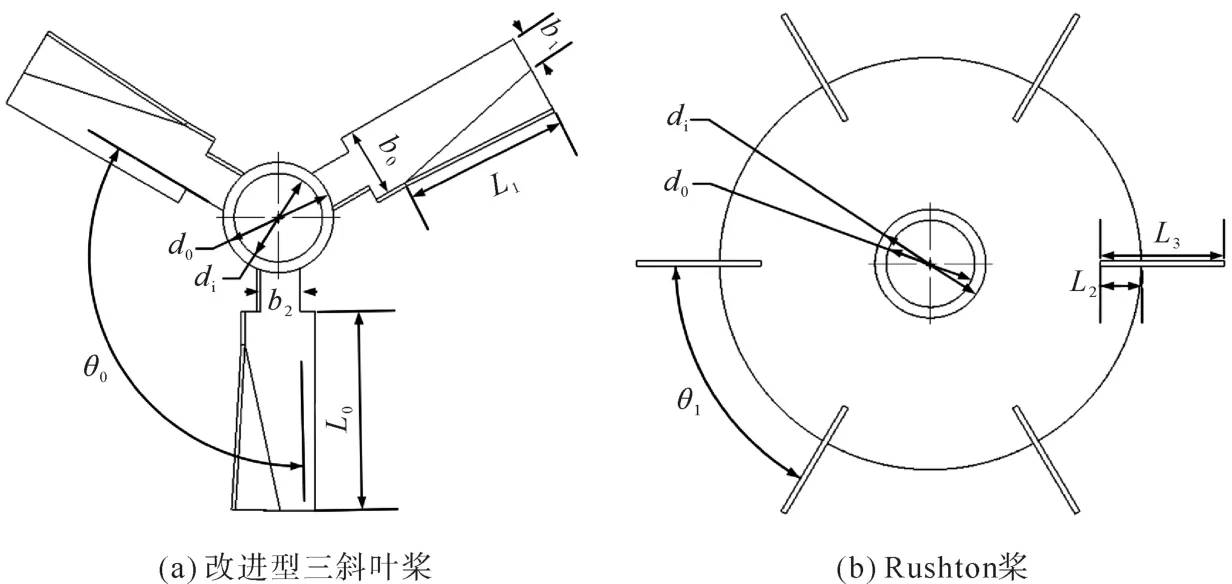
图2 搅拌桨结构模型Fig.2 Structural model of stirring impeller
1.2 实验方法及后处理
PIV 技术可以记录空间上在同一瞬间大量点的速度分布,PIV 的系统大致分为3部分,分别为光源子系统,图像采集子系统和图像处理及显示子系统,其系统原理图和实验连接图如图3所示。
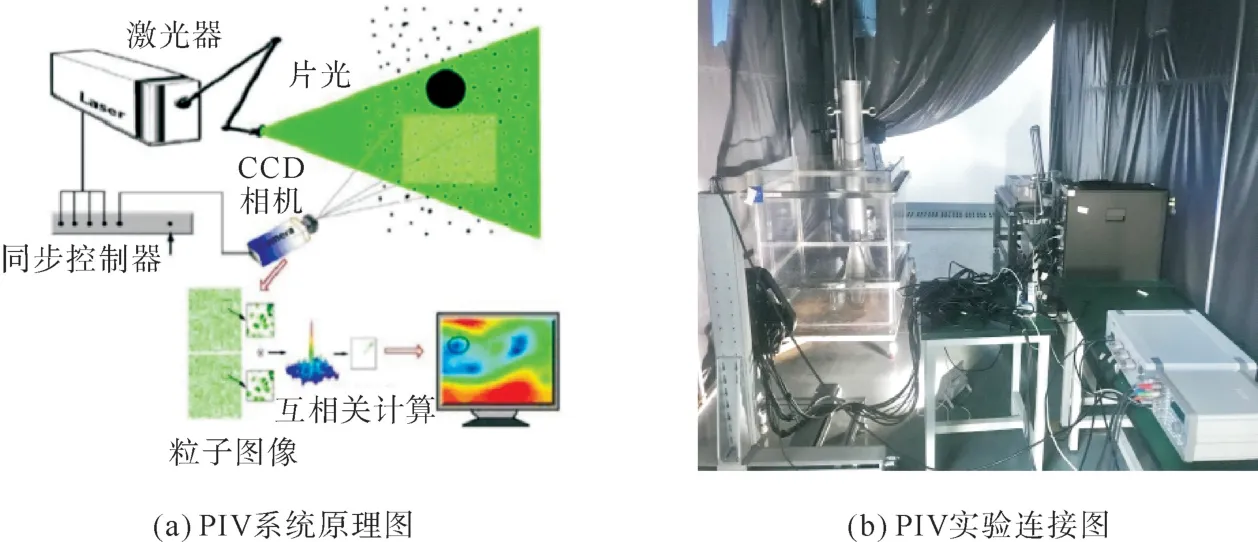
图3 PIV系统示意图Fig.3 PIV system diagram
实验开始时向搅拌槽加入黏度为28.3 mPa·s的甘油-水溶液作为搅拌介质,同时加入示踪粒子并搅拌均匀。向储水方槽中注入清水并与搅拌槽内液位齐平,以此来避免折射现象。打开双脉冲激光器发射出2条激光,在搅拌槽内形成2块明亮的示踪粒子区域,此时同步控制器控制CCD 相机连续拍摄2帧粒子图像,通过这2张图像的对比可以得到在一定时间内粒子的位移和速度。每一种工况拍摄100组200张照片。为了清晰具体地看出槽内速度分布情况,通过Tecplot图像处理软件和Origin函数绘图软件对拍摄结果进行后处理得到速度分布图。
2 结果与讨论
2.1 转速对流场特性的影响
对径向速度u和轴向速度v对桨叶尖端点速度Vtip进行无因次化处理,即u/Vtip为径向无因次化速度,v/Vtip为轴向无因次化速度。对轴向和径向位置做无因次化处理,得到轴向无因次化高度z/H和径向无因次化位置r/T。
在相同离底距C1=0.3和桨间距C2=0.25的情况下,4种不同转速N=80、100、120和140 r·min-1的径向和轴向无因次化速度分布如图4 所示,在径向无因次化位置r/T=0.26,r/T=0.30和r/T=0.34 处得到径向和轴向无因次化速度。由图4(a)、(b)、(c) 3种不同径向位置下径向无因次化速度分布图所示,转速对径向无因次化速度变化的影响基本相似,在不同径向位置都出现2个径向无因次化速度的波峰。随着轴向无因次化高度z/H的增大,在z/H=0.08处出现首个波峰,此处为Rushton桨所在的位置,在0.08<z/H<0.18范围内,由于受到上层桨叶的影响,径向无因次化速度减小在z/H=0.18处产生波谷,当靠近上层桨时,受到其射流作用的影响,径向无因次化速度再次变大,在z/H=0.36处出现第2次波峰。随着轴向高度增加,由于受到改进型三斜叶桨的影响逐渐减弱,在z/H>0.6 时径向无因次化速度趋近0。
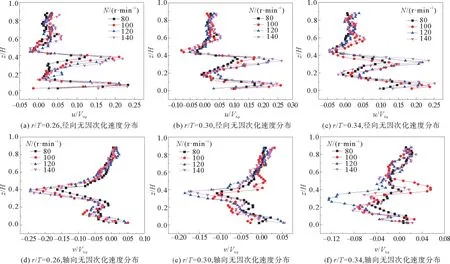
图4 相同桨间距和离底距情况下4种不同转速的径向和轴向无因次化速度分布Fig.4 Radial and axial dimensionless velocity distributions of four different speeds at the same impeller pitch and distances from the bottom
实验定义竖直向上方向为正方向。由图4(d)、(e)、(f)3种不同径向位置下轴向无因次化速度图所示,在0.26<r/T<0.30时,转速的变化对轴向无因次化速度的分布影响也基本相似,因为受上层改进型三斜叶桨的轴流影响在轴附近产生1个向下的涡旋,所以在z/H=0.4出现波峰且在此区域内轴向无因次化速度总体上呈负值。在r/T=0.34时,轴向无因次化速度分布受转速的影响较为明显且出现正值,这是因为液体与壁面碰撞产生一个向上的速度造成的,相较于N=80 r·min-1,当N=100 r·min-1时两桨叶间的速度分布均匀,轴向无因次化速度呈中心对称分布。随着转速增大到140 r·min-1槽内速度分布无太大变化,但是功率消耗增加,所以100 r·min-1为最佳转速。
2.2 离底距对流场特性的影响
如图5所示为相同转速N=100 r·min-1和桨间距C2=0.25的情况下,在离底距C1=0.23H、0.26H、0.3H时的径向和轴向无因次化速度分布图。由图5(a)径向无因次化速度分布图所示,在z/H>0.4区域,随着r/T的增大,上桨叶所形成的径向无因次化速度在减小,在z/H=0.2处出现速度峰值。对比C1=0.23H和C1=0.26H的下层Rushton 桨叶区域,可以看到随着离底距的增大,Rushton桨的径向射流效果明显,u/Vtip增加了约0.2。如图5(c)所示,随着离底距的进一步增大可以清楚地看到双峰的出现,但是下层桨叶对应的速度峰值大于上桨叶,这是因为下层桨为径流桨上层桨为轴流桨。由于离底距的增大,上层低速区从0.3<z/H<0.9变为0.5<z/H<0.9,低速区域有所减小,离底距的增大对槽内的速度分布有明显改善。

图5 相同转速和桨间距情况下3种不同离底距的径向和轴向无因次化速度分布Fig.5 Radial and axial dimensionless velocity distributions of three different distances from the bottom at the same speeds and impeller pitch
由图5(d)、(e)、(f)3种不同离底距下轴向无因次化速度分布图所示,轴向无因次化速度的分布大多呈负值,这是因为桨叶向下的射流作用形成的。随着离底距的增加,改进型三斜叶桨形成的向下射流的单峰值从z/H=0.3增加至0.5,上桨叶区的湍动程度得到增强。当上层桨叶形成的速度峰值衰减至下桨叶区域时,由于Rushton桨的作用,在下桨叶区域又形成一个较小的峰值,但是峰值明显小于改进型三斜叶桨所形成峰值。当C1=0.3H时上桨叶区的轴向无因次化速度达到最大且下桨叶区的低速区也有所减小,径向无因次化速度能够在相对较高的速度下均匀分布,此时混合效果达到最佳状态。
2.3 桨间距对流场特性的影响
如图6所示为相同转速N=100 r·min-1和离底距C1=0.3H的情况下,3 种不同桨叶间距C2=0.22H、0.25H、0.29H在不同径向无因次化位置的径向和轴向无因次化速度分布。由图6(a)可见,在z/H=0.05和0.3处分别出现1个速度峰值,在z/H=0.2处出现1个波谷,这是由2个桨叶的径向射流所形成的,因为Rushton桨的径向射流作用要强于改进型三斜叶桨,所以下峰值高于上峰值。随着桨间距的增大两波峰之间的距离也随之增大,上波峰从z/H=0.3增加到0.4,此时上桨叶区的低速区有所减小。当桨间距从C2=0.22H增加到0.25H时,两桨叶间的稳定区域增加了25%,但随着桨间距的进一步增大,可以看到两桨叶间的低速区域也在扩大。

图6 相同转速和离底距情况下3种不同桨叶间距的径向和轴向无因次化速度分布Fig.6 Radial and axial dimensionless velocity distributions of three different impeller pitch at the same speeds and distances from the bottom
由图6(d)、(e)、(f)轴向无因次化速度图可见,在近桨区域,轴向无因次化速度受r/T的影响较大,在轴向无因次化位置0.05<z/H<0.5内出现2次波峰和1 次波谷且波峰最大值出现在r/T=0.26处,随着r/T的增大,因为受到双桨的射流作用减弱以及内壁的影响,轴向无因次化速度变化很小。对比C2=0.22H和C2=0.25H,上桨叶区的低速区从0.5<z/H<0.9 缩小到0.6<z/H<0.9,使得上桨叶区的混合更加均匀。当桨间距C2=0.29H时,上桨叶区的低速区变化不大,但是上下2个峰值之间间距变大导致两桨间开始出现低速区,此时桨间混合效果不佳,所以C2=0.25H为 最佳桨间距。
3 结论
1) 转速N=100 r·min-1时,轴向无因次化速度分布呈中心对称结构,两桨叶间的速度分布均匀,随着转速的增大上桨叶区的低速区域无太大变化,但功耗增大了。这表明N=100 r·min-1时最佳。
2) 随着离底距的增大,槽内高速区域的位置在向上升高,槽底和上桨叶区的低速区域也减少,当离底距C1=0.3H时,上桨叶区的轴向无因次化速度达到最大且径向分布均匀,槽内的整体湍动程度增强,混合效果达到最佳状态。
3) 当桨间距增大时,上桨叶区的低速区在减小,但是两桨叶间开始出现低速区,混合效果不佳。桨间距C2=0.25H时,两桨叶间的速度分布相对比较均匀,径向速度相对稳定,槽内的整体搅拌效果达到最好,此时最有利于槽内流体的混合和传质。
猜你喜欢
火控雷达技术(2023年2期)2023-07-15 14:00:06
一重技术(2021年5期)2022-01-18 05:42:08
水利与建筑工程学报(2019年6期)2020-01-08 03:23:04
固体火箭技术(2018年6期)2019-01-18 10:56:26
测控技术(2018年4期)2018-11-25 09:47:14
三联生活周刊(2017年37期)2017-09-11 19:28:14
科技创新与品牌(2017年3期)2017-04-27 18:37:20
电机与控制应用(2015年2期)2015-03-01 03:49:22
振动工程学报(2015年2期)2015-03-01 01:16:07
电测与仪表(2014年13期)2014-04-04 12:04:16
