一种可视力矩工具在配电元件螺纹紧固中的应用
2024-03-05 06:53刘敬业
电气技术与经济 2024年2期
刘敬业
(广东电网有限责任公司梅州供电局)
0 引言
力矩就是力和距离的乘积,在紧固螺丝螺栓螺母等螺纹紧固件时需要控制施加的力矩大小,以保证螺纹紧固且不至于因力矩过大破坏螺纹。配电元件螺纹紧固过程中主要采用机械扳手,在过于用力时很容易引起螺纹滑丝、崩裂,而力度不到位则可能造成元件晃动、断触短路等,增加了配电安全运行风险。如何调整螺纹扳手,使力矩实时显示,已经成为新时期人们关注的焦点。
1 需求分析
在配电线路上,螺丝、螺栓和螺母是我们最常见的,也是配电线路中必不可少的零件,俗话说“细节决定成败”,如果螺丝没拧紧,会因为接触不良,导致接触点的剧烈发热,并伴随着漏电现象,严重时会出现电弧,有可能引起单相接地故障,甚至是发生三相短路。简单点说就是会发热,发热就可能会熔断。由此可见,拧紧螺丝至关重要。配电作业中,螺丝的松紧度没有进行实际的测量,拧紧螺丝都是凭借着师傅们的手感来判断是否拧紧,这就导致螺丝拧的太紧,对螺丝造成损伤,太松会造成接触不良,这会往往是导致故障跳闸发生的根源所在。
为了能保证配电线路的安全性及供电的可靠性,特研发设计一种可视力矩、可插换头、支持声光告警、支持自动调控的扭矩扳手。该装置由扳手本体和数控系统两部分组成,在使用时首先要设定好各类固定作业所需力矩需求参数,内置力矩值。当施加的扭矩达到设定值时,工具会作出震动提示,代表已经达标准力矩需求,不需要再加力,保证了我们的螺纹紧固件,已达到最有效的位置,大大提高我们作业人员的施工水平及部件连接的安全水平,从而保证我们的供电可靠性。
2 技术方案
2.1 技术原理
扭矩扳手中常采用直流电机自动旋拧,故扭矩监测时可根据直流电机的电流信号和转速信号计算。
按照电机轴动力学关系,理想状态下电磁转矩与转动惯量呈正相关。当考虑负载转矩和空载转矩时,电机轴上的飞轮惯量为:
式中,Tem为电磁转矩,T1为负载转矩,T2为空载转矩,J为转动惯量,GD2为飞轮惯量,n为转速信号。
电机正常运转时,空载转矩可忽略不计,则动力学方程可简化为:
按照电机电磁学关系,正常运转过程中电磁转矩与转矩常数和磁通电流呈正相关。电磁关系式为:
式中,CT为转矩常数,Φ为电枢磁通,Ia为电枢电流。
将两式联立,可发现电磁转矩与电枢电流整体线性正相关,即T1=f(Ia,n)。若负载过高,电枢磁通过大引起去磁反应,则电磁转矩略微降低。
当电机空载运行时,电流增量可记为ΔIa=Ia-Ia0,此时电磁转矩T1=f(ΔIa,n),即通过电流增量和转速信号增量就能够快速计算出负载扭矩值。
2.2 工具设计
本次设计的可视力矩工具主要包括扳手主体和数控系统两部分。其中,扳手主体采用扭矩扳手,配可拆卸插头的传感结构,可根据元件情况选择对螺固接头;数控部分采用PIC18F4520 芯片,配合液晶显示单元,实现力矩显示告警,如图1所示。

图1 可视力矩工具
(1)硬件设计。扳手扭矩传感器与可拆卸接头连接,可根据不同作业场景更换套筒、卡扣等,使用起来更加便捷灵活;扭矩传感器采集电枢电流信号,并将其转换成扭矩值通过无线传输网络上传到数控系统中,而角度传感器采集电机传动信号,计算出电机转速,为数控系统测扭矩提供参考;液晶显示屏中设置按键,可选择螺丝规格、旋拧方式、扭矩参数等,并实时显示力矩数值。除此之外,显示屏区域还配置声光报警,若扭矩超出设定值,则系统双重告警提醒,增强了旋拧保护效果,详见图2。
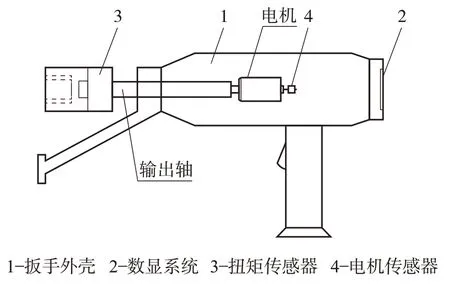
图2 硬件结构
(2)软件设计。PIC18F4520 芯片功耗低、抗干扰型强,可驱动多种型号直流电机,操作非常便捷,非常契合配电作业情景需求。本次设计的电机驱动电路采用PWM 脉宽调制方式,对输入过程中的冲击电流进行抑制,在逻辑电平控制下实现电机的正反转调节,如图3所示。
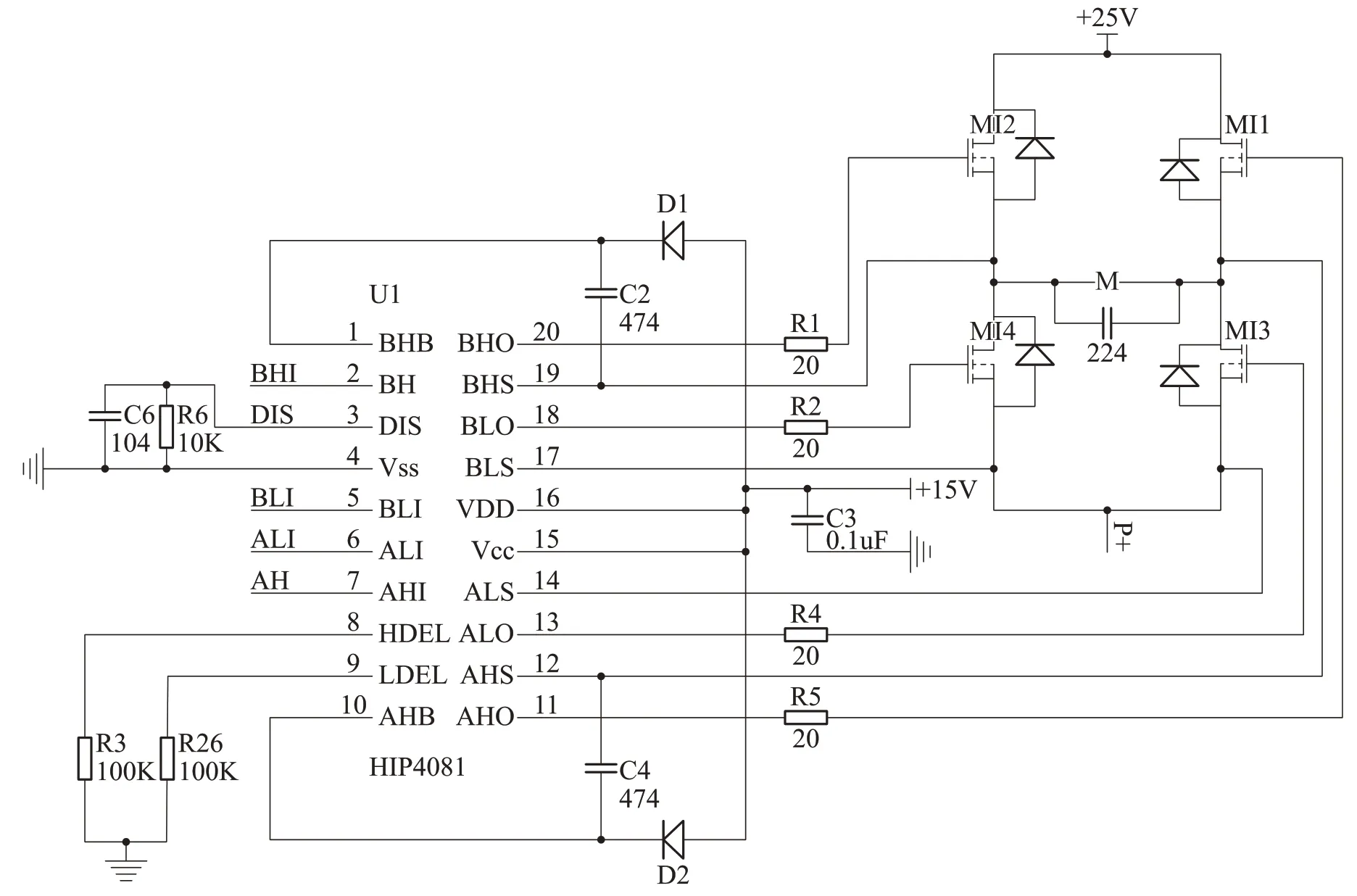
图3 电机驱动电路
信号采集电路采用传感器+无线传输模式。其中,电机自带的电流传感器测量范围在0~100A,扭矩传感器和角度传感器测量误差控制在±3%以内。采集到的模拟信号上传到存储器中后,经数显控制系统中的PIC18F4520 处理单元转化为数字信号,并通过Wifi网络或5G网络上传到远程终端中,如图4所示。
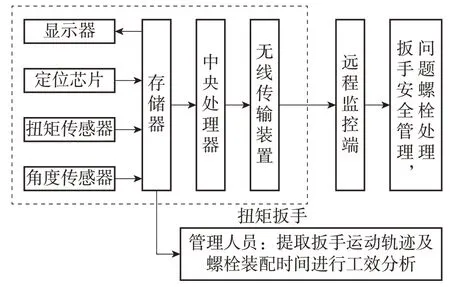
图4 数显控制流程
2.3 功能优化
(1)参数设置。为进一步增强可视力矩工具的实用效果,在功能设计的过程中可在数显系统中录入不同配电元件螺纹紧固的装配动画,供人员在操作过程中选择参考。同时,针对不同类型的螺纹紧固方式,设定螺纹参数和螺纹样式,在不同操作下(初拧、终拧)的参考数值。人员在使用该工具的过程中可通过数显面板中的设置按钮录入扭矩、转数等参数,当扳手自动旋拧过程中,数显系统以上述设定值为基准进行比对,分析是否旋拧到位。
(2)数据传输。为保证可视力矩工具通信便捷且便于携带,在数据通信时采用无线通信方式,以Wife 和5G 信号为主,进行参数信息和控制信息的双向传输。同时,为增强数据传输的可靠性和准确性,在数据通信时还利用GPRS 网络,实时定位螺纹旋拧区域。此时,若存在旋拧方式不合理、螺纹工具不匹配、转数设置不正确等情况,系统可直接通过定位信息通知到作业人员,即可调整或优化。
(3)数据处理。本次设计的PLC 控制系统中可自动存储和记录传感器中采集到的各项数据,并通过设定的逻辑程序计算出扭矩数值,判断其与参数设定值是否一致。当到达参数设定值时,系统显示异常告警,如图5所示。
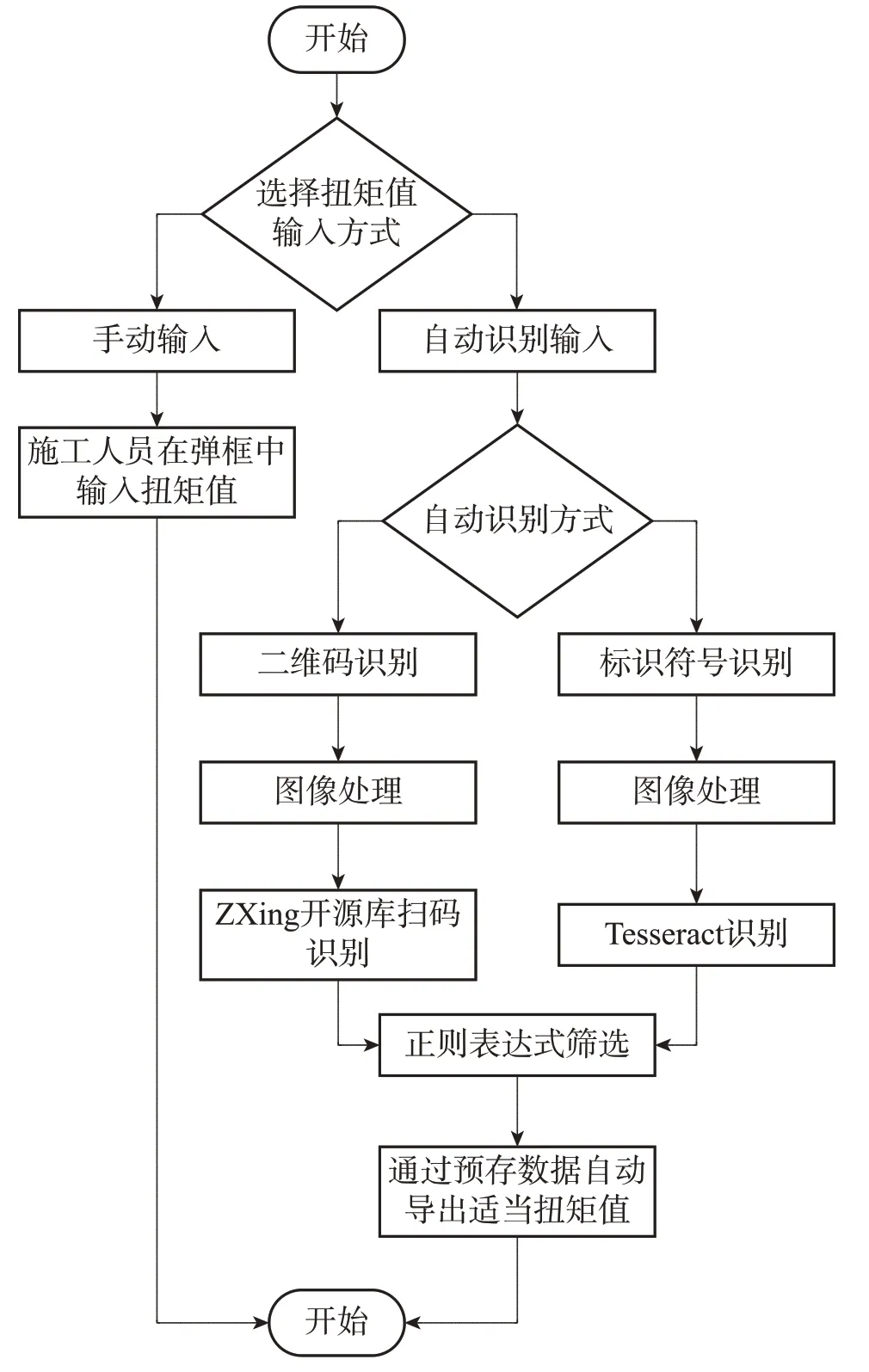
图5 数据处理流程的优化
上述中央处理单元运行时先初始化端口,采集设定的参数值、Wife 传输的工作数据;然后,根据设定的扭矩值输入方式,自动识别信号中的电流数据、电机转数等,按照建立的公式模型计算中实时扭矩;最后,将设定值与实时参数对比,判定配电元件螺纹紧固程度,直至结束。
(4)自动调节。可视力矩工具中设置PID 闭环保护,正常作业环境下数显系统中的扭矩值显示持续上升,此时PID 闭环调节回路作用在电流回路上,使电机转速平稳下降,直至达到指定扭矩参数后停止。而在电机传感器检测到的电流值异常时,PID 闭环调节回路可自动反馈,使扭矩扳手中的电机停止运转。
上述反馈回路可增强扳手使用过程中的平稳性和可靠度,避免电机过速旋转或快速旋转造成的拧死、拧坏等问题。尤其是在电流反馈时,使电机转速越来越慢,在到达指定参数后能够更好地控制电机旋转惯性引起的过度拧紧缺陷,调节效果良好,值得深入研究和应用。
3 效益评估
对可视力矩工具进行扭矩控制精度测试,考虑电机温度、机械摩擦等影响,实验室测试时通过线性回归方式进行数据拟合和校准,设定1200~3200N·m 的测试范围,每400N·m 测试一次,数据结果显示:设计的可视力矩工具旋拧就位时的测试值与预设值基本一致,相对误差整体控制在2%以内,达到了非常好的配电元件螺纹紧固效果。
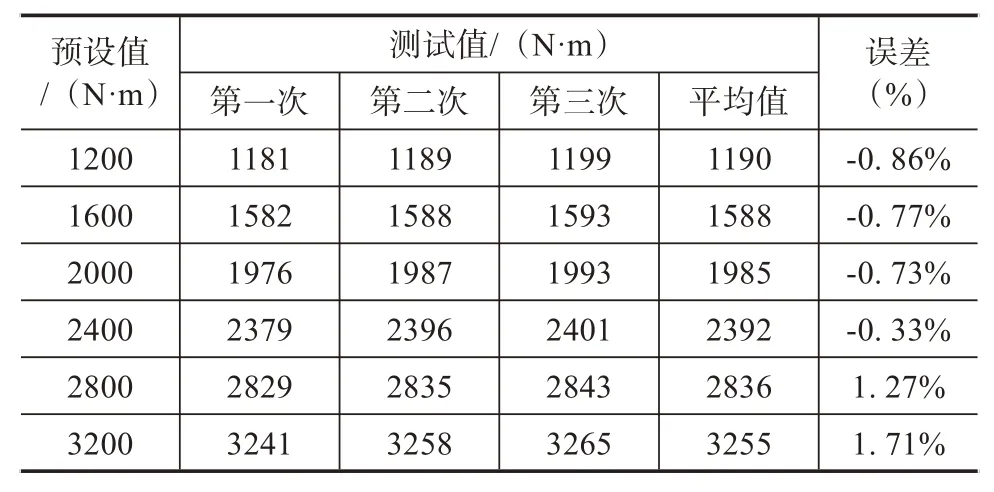
表1 可视力矩工具的测试结果
将可视力矩工具在配电元件检修工作中投入使用后,配电元件螺纹紧固时间由原来的分钟级缩短到几秒,大大缩短了机械扳手使用过程中一直调整方向、调整扳手等浪费的时间,从根本上改善了配电检修时效。同时,在可视力矩工具投入使用后,当月我单位未出现1 起由螺纹紧固不当引起的配电元件损失。现场检查确认,上述配电元件均旋拧牢固且不存在任何损伤,有效缓解了由螺丝过紧或过松引起的配电安全隐患和经济风险。
综上所述,本项目成果可视力矩工具在配网作业中,保证了我们的螺纹紧固件已达到最有效的位置,使得螺纹紧固件受力均匀,大大提高我们作业人员的施工水平及部件连接的安全水平。将此工具应用于所有配网作业中,可解决由于螺纹紧固件太紧或不够紧固造成线路故障的问题,从而保证我们的供电可靠性,值得深入研究和推广应用。
4 结束语
可视力矩工具采用扭矩扳手和数显系统实现配电元件螺纹自动旋拧、自动调控,有效避免了螺纹过紧导致的损伤和螺纹过松引起的晃动,为配电检修和运维管理提供了有效支撑。在上述工具应用过程中,应不断优化数显控制单元,增强数据采集的可靠性、数据传输的有效性、数据计算的准确性,这样才能够最大限度降低旋拧误差,使配电元件又好又快安装就位,最大限度改善配电工作的安全效益和经济效益。
猜你喜欢
青少年科技博览(中学版)(2023年9期)2023-11-30
幼儿画刊(2022年6期)2022-06-06
当代陕西(2022年6期)2022-04-19
特别健康(2018年4期)2018-07-03
凿岩机械气动工具(2017年3期)2017-11-22
军营文化天地(2017年7期)2017-09-25
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
军事文摘(2016年16期)2016-09-13
中国塑料(2015年9期)2015-10-14