基于励磁控制电力系统低频振荡的策略研究
2024-03-05 06:52吉祥
电气技术与经济 2024年2期
吉 祥
(中山嘉明电力有限公司)
0 引言
电力网络可以合理利用资源,解决事故支援问题,从而将发电和输电过程变得更加稳定,经济性也得到很大的提升,随着升级的同时也带来了新的问题。系统的运行在极限的边缘,使得电网的运行受到前所未有的严峻的挑战。首当其冲的是电力系统低频振荡对电力的安全运行有极强的破坏和挑战。若不能很好地控制电力系统低频振荡,将会对电力系统造成瘫痪,对用户的正常使用产生严重的影响,对中国电力事业的发展造成极大的阻力和困难。所以,从根本上对低频振荡进行分析和研究,从实际中制定控制策略,才能有效地抑制电力系统低频振荡的发生。通过对励磁控制器的研究对控制器进行不断的优化和升级能更加稳定的对电力系统低频振荡进行有效控制[1-2]。
1 低频振荡方法研究
1.1 基于传统模型分析方法
① 复频域法
复频域法复频域的方法也被用来简称或作为二阶特征线性根法,此类计算方法主要是通过直接计算电力系。统二阶状态特征方程矩阵中的一个特征线性根的值来直接获取电力系统的一个整体线性振荡能力模型,或者系统的阻尼相对较弱并且可以通过计算针对系统特征线性矢量、特征线性根的测量灵敏度分别进行矢量计算和数值分析,可以直接获得一些更加深入多样化层次的数学信息[3]。
② 时域仿真法
时域系统仿真计算方法将整个中国电力系统的各个主要元件仿真模型按照时域相应的各个元件之间相互拓扑化的关系原理组合在一起来计算形成完整的全时域系统仿真模型,然后以系统稳态值或系统潮流值将理论值分解为初始仿真值,逐步计算求得系统的小时状态速度量与系统代码的数量形成跟随系统时间而不断变化的状态速度仿真曲线,最后根据电力系统小时输出的状态速度与系统时域仿真曲线关系来准确判断电力系统在一小时的干扰条件稳定下的系统状态速度能否与电力系统状态保持高速同步平衡运转。
1.2 电力系统低频抑制方法
① 静止无功补偿器SVCV
SVCV 具有自动阻尼调节器来控制网络传送信号系统所需要执行的所有并联信号阻抗、电流、电压、相位和偏角和并联振荡器的阻尼控制系数。SVCV 它是一种同时可以迅速准确进行电压调节的无源低功直流电源,利用它的双向可变特性引导使其输出信号能够给它的电提供很强的阻尼。它的主要功能作用之一就是为了能够保证对系统动态无功功率电压进行快速的自动调节,并且它还甚至可以同时起到兼有它在发生调压事故时对系统电压的自动支撑控制作用,维护系统电压的稳定水平,平息调压系统的高频振荡。
② 晶闸管控制移相装置TCPS
通过对输入线路信号输出端的信号功率进行移相控制,以大大提高了对输出线路信号的控制功率并以偏差值作为控制极限,降低了阻尼振荡。由于它是传统的一种机械式移相器,只能对它进行动力分级和自动调节,级数也一定不能过多,并且其运行动作速度慢,寿命短,没有任何动力抑制和自动振荡是后来用于改善整个系统的一种动态稳定性质的控制能力。
③ 电力系统稳定器PSS
最初设计是由两位美国著名学者包括F. P. dem‐ello 和F.C.concodri 首先合作提出的。它从励磁驱动器中直接抽取并输出经过角动的速度,功率或驱动频率等镇定的驱动参数,经过主要是由包括驱动放大,复位和超前以及滞后三个驱动环节所连接构成的驱动校正处理环节并在进行校正处理后将其所连接产生的。电力系统的稳定器不仅可以抑制低频振荡,而且还可以提高系统动态性能。常规PSS消除负阻尼的作用主要通过励磁控制系统来完成。PSS 对于转速或者其他信号的频率变动进行响应,可以让发电机在驱动时产生一个和速度相等的电能和功率输入,但是常规PSS 仍被认为是一种可以抑制电力系统的低频振荡,改善微波干扰稳定性的一种重要手段[4]。
2 常规PID励磁控制器研究
一个常见的PID 励磁控制器是AVR 自动电压调节器,它采用PID 控制操作,也被称为自动励磁控制器。是现如今常规PID 控制中经常使用到的一种控制器,它在PID 的基础上增加一个元件PSS,进而极大地提高其控制性能。其目的是找到一组PID 控制参数,使系统具有更好的控制特性。首先,建立一个系统的数学模型,然后通过控制理论方法确定一组PID参数。
包括了前置放大级和功率放大级,假设,具有线性的电压放大系数和时间常数,则
式中,UR(s)为放大元件输出电压。
在提高系统稳定性的同时,将其调节品质进行升级,所以,通过增加串并联校正单元来实现,其实现通常采用PID结构。参数见下表1。
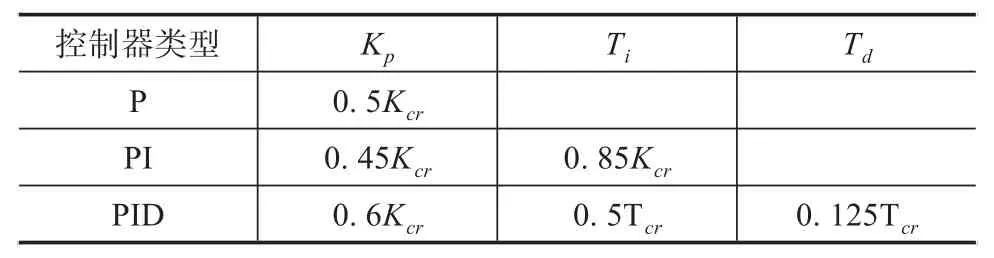
表1 控制器参数
(2)AVR+PSS励磁控制器研究
因发电机绕组和励磁系统的相位滞后可表示为:
KA,TA分别表励磁系统传递函数Ge(s) =的增益和时间常数。
为了消除滞后相角,运用PSS设置超前环节。
传递函数表示为:
当T1=T3,T2=T4时,传递函数可表示为:
PSS 只有在电力系统发生低频振荡是启用,正常运行时无任何影响,为达到这个目的,需加入一个隔离信号环节,其传递函数为:(也称为一个微分环节,KC是PSS 的放大倍数,可用于调节所提供的阻尼大小。随着技术的发展,现今的PSS输入形式是多种多样,如发电厂母线的频率偏差等等。
3 仿真分析
3.1 极端电压小扰动仿真实验
为了对两个模拟极端输出电压下的小于微扰动信号进行模拟实验,在输出t=10s 时,通过励磁驱动控制器的两个模拟极端输出电压函数来分别参考一个进出输入端(vref)上分别施加10%的阶跃式的微扰动控制信号,进而实现可以直接达到小于微扰动的一种模拟控制效果,然后两种励磁控制器在各自不同工作系统运行的环境控制下通常都会分别有一个进入输出和另一输入端的波形。
在控制器输入端加入扰动信号后电压产生波动,次数10 次左右,同时电流也产生波动10 次有余,发电机转速在七秒左右波动数次。收敛速度慢,无法满足对系统小扰动情况的抑制作用,控制性能差。在小扰动仿真实验中AVR+PSS 控制器表现出良好的控制性能,经对比发现发电机电功率即电压电流波动次数从数十次骤减至三次左右,相比常规PID 控制器,AVR+PSS 控制器能够快速完成收敛,极大缩短了系统振荡时间以及振荡的次数。
3.2 单机无穷大系统三相短路仿真
AVR+PSS 控制器在三相短路控制过程中极大的缩短了系统的振荡次数以及振荡时间,相比常规PID控制器在三相短路的控制性能上表现出良好的性能。通过上述实验结果进行对比,其目的反应以上两种控制器的控制性能。其实验结果如表2,表3所示。

表2 两种控制器小扰动性能比较
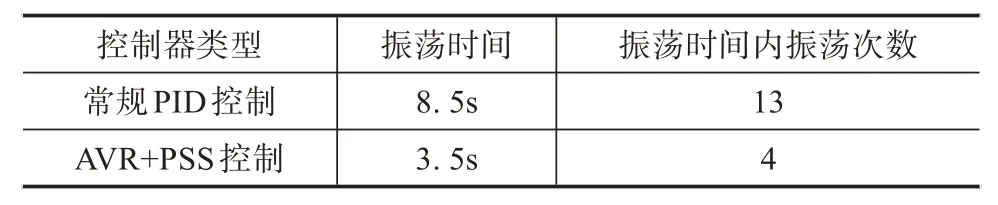
表3 两种励磁器三相短路性能比较
对比上述两表得出以下结论:
1)常规PID 控制的控制性能远远低于AVR+PSS励磁控制器的控制性能。
2)PSS 在抑制电力系统低频振荡中起关键作用,很好的减少系统的振荡时间和振荡次数,对控制器对低频振荡的控制性能有极大地提高。
4 结束语
电力系统正常运行的各个机组间有时候还可能会遇到出现低频功率信号振荡的复杂问题,其功率振荡信号频率的波动范围一般可以控制在0.2~3Hz,因此又被人们称为低频功率振荡。
所以本文将对基于励磁控制抑制的电力系统低频振荡策略进行研究。对AVR+PSS 控制器和常规PID控制器的原理进行学习,通过上述两种控制器在小扰动实验和三相短路实验下进行仿真,对得出的实验数据进行对比分析,从而得出常规PID 控制的控制性能远远低于AVR+PSS 励磁控制器的控制性能。PSS 在抑制电力系统低频振荡中起关键作用,很好的减少系统的振荡时间和振荡次数,对控制器对低频振荡的控制性能有极大地提高。
猜你喜欢
河北电力技术(2021年2期)2021-07-29
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
测控技术(2018年11期)2018-12-07
电子制作(2018年1期)2018-04-04
大电机技术(2017年3期)2017-06-05
系统工程与电子技术(2016年7期)2016-08-21
数学物理学报(2016年6期)2016-04-16
西北工业大学学报(2015年4期)2016-01-19